わかりにくいので、作り替えます。しばしお待ちを。
エキセントリックな軌道
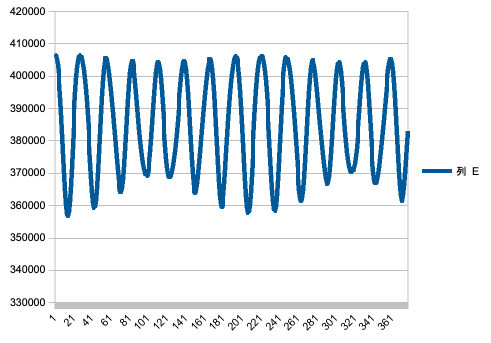
月の軌道に関しては、単純な楕円軌道ではありません。
近点遠点の距離が変化するエキセントリックな楕円軌道です。
>
軌道周期と振動周期
これは、2度の衝突の場合、「円軌道」+「振動」の両方が2回変化します。 2回目の衝突で、軌道周期と振動周期が変わるので、 1回目の衝突の単振動は、1回目衝突の軌道周期と2回目の衝突の軌道周期の差の分、位相がズレます。 その位相のズレが軌道の唸りになります。 2回目の振動は軌道周期と同じです。 2回目の振動に遠点・近点距離が変化した1回目の単振動が合成されエキセントリックな軌道になります。
遠点と近点の変化量の違い
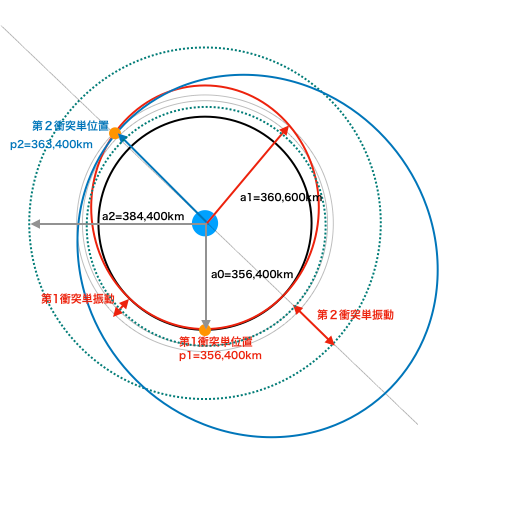
遠点と近点で変化量が違うのは、 2回目の衝突位置で決まります。 1回目の単振動の丁度中間の基準軌道上で衝突すれば、 遠点近点距離の変化量は同じです。 基準軌道の上で衝突すれば、遠点の変化量が少なく、 近点の変化量が大きく、 基準軌道の下で衝突すれば、遠点の変化量が大きく、 近点の変化量が小さくなります。 月の場合、2回目の衝突は、 1回目の振動の基準軌道より上で衝突しました。
地心座標モデリング
第2基準軌道を中心とした、地心座標を次のように定義します。
まず、第1基準軌道を中心とした振幅A1の単振動の軌道を想定します。 (振動周期=a1の軌道周期とする)ω1を角速度(rad/h) tを時間(h)とすると
R1(t) = A1 cos( α1 ω1 t )…①
と表されます。 第2基準軌道を中心とした振幅A2の振動の軌道を想定します。 (振動周期=a1の軌道周期とする)ω2を角速度(rad/h) tを時間(h)とします。 第1基準軌道からiPの位置で衝突したと仮定します。
R2(t) = A2 cos( α2 ω2 t)…②
①式の角速度と周期率がα1とω1からα2とω2に変わるので
R’1(t) = A1 cos(α2ω2t)) cos(β2ω2t) …③
となります。
第2衝突は、衝突位置が基準軌道から+iP離れているので、
R'1は上と下に分離します。
上方向の振幅はiPになり、下方向の振幅は(2A1 – iP)になります。
R’1(t)は
R”1(t) = A1( cos ( α2 ω2 t ) – iP ) cos( β2 ω2 t )…③
となります。
R”1(t)とR2(t)が合成され、第2衝突後の地心座標は
R’2(t) = a2 + R”1(t) + R2(t)
となります。
地心座標モデリング式
R’2(t) = a2 + ( A1 cos (α2ω2t) – iP ) cos( β2 ω2 t) + A2cos( α2 ω2 t) km
where
a0 :当初基準軌道 km
a1 :第1衝突基準軌道 km
a2 :第2衝突基準軌道 km
A1 :第1衝突による単振動振幅(= a1 – a0) km
A2 :第2衝突による単振動振幅 (=a2 – a1 – iP) km
iP :衝突位置(基準軌道からの位置)km
α :周期率

β :唸り率
