
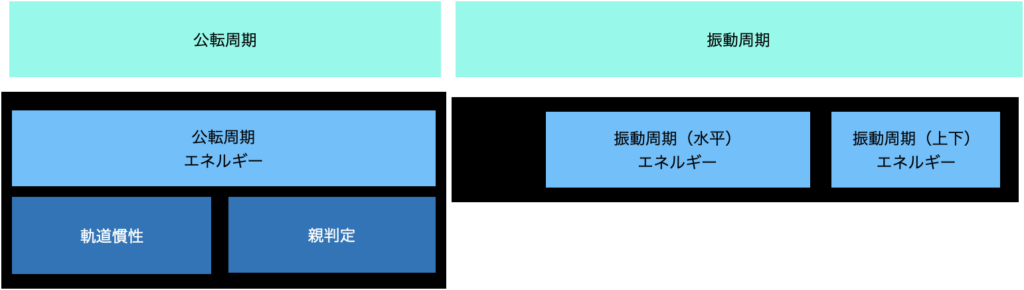
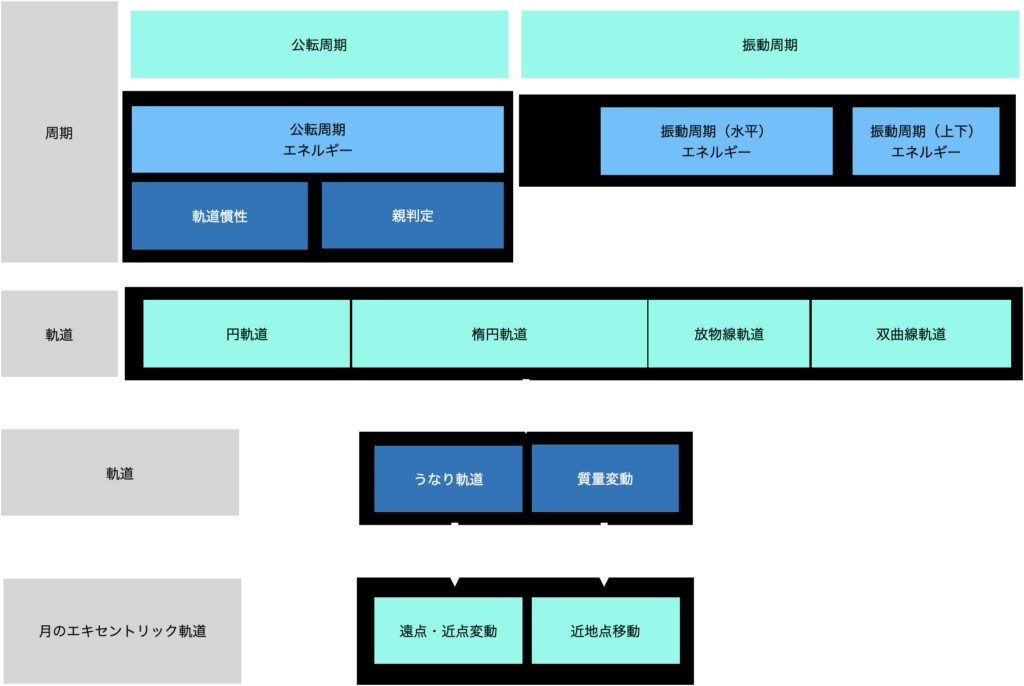
公転周期は中心星の周りを集会天体が回る軌道です。
振動周期は、基準軌道となる軌道(基準軌道)を中心に
振動する周期です。
この2つの周期で軌道が決まります。
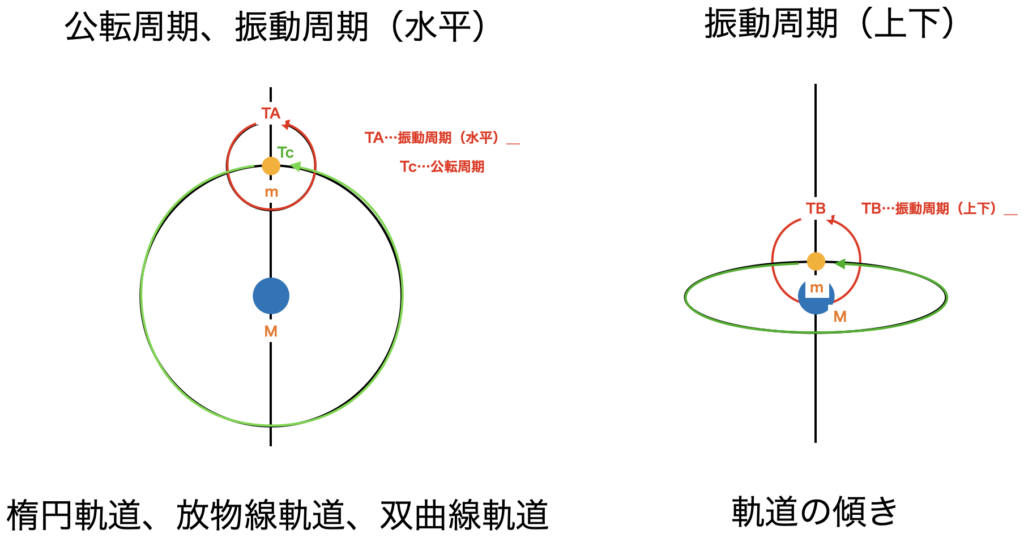
振動周期は、水平方向と垂直方向(上下)の2つがあります。
水平方向の振動はは、軌道の形(楕円、放物線、双曲線など)を
決める要素の1つになります。

公転周期は中心星の周りを集会天体が回る軌道です。
振動周期は、基準軌道となる軌道(基準軌道)を中心に
振動する周期です。
この2つの周期で軌道が決まります。
振動周期は、水平方向と垂直方向(上下)の2つがあります。
水平方向の振動はは、軌道の形(楕円、放物線、双曲線など)を
決める要素の1つになります。
(ナレ)ここは、田舎の研究所。
動物好きの女性所長と、頼りになる研究員で宇宙の研究をしている。
そんな中、ある日
保護猫のチャーがあらわれる。びしょ濡れで研究所に顔をだした。
それから、ずっと研究所に居ついた。そして、チュールがお気に入り。
というか、チュールしか食べない。
チャーは、研究所に来る前は、
猫軍団といっしょにあそんでいた。
チャーが研究所に来てから、1年程たった夏の日、
研究所がある町に、
猫嫌いなおじさんが居て、
猫狩りを始めた。
それで、
猫軍団は、あわてて、研究所に逃げてきたのだ。
今や猫軍団は、研究所に住み着いている。
研究所は、
宇宙の研究をしているが、
あまり良い成果があがらない。
論文も駄作続出。
さてさて、研究員は、
スクラップ アンド ビルト だ!!
と意気込んでいる。
はたして、何かいいアイデアや理論が生まれるのか!
(エンディ)まあ、ここで私は一言言いたい!
「もっと宇宙の構造は簡単ではないかと。」
「宇宙の動きは、簡単な数学で動いているに違いない。」
でなければ、宇宙自体が、
超スーパーコンピューターみたいな頭脳を持っていなければ、
この宇宙を保つのはむずかしいです。
(研究員)3体問題すら解けない宇宙って変じゃないですかね!!
3つの天体の動きが、計算できないって。
そりゃ根本の考え方が違っているんじゃないかと思うんですよ。
宇宙は、3体問題は発生しないということでです。(言い切った!)
2つの場合は明確にわかるんだから、
すべては2体問題で解決できるんじゃないかと思うんですよ。
(エンディ)
太陽、地球、月といった関係は、
太陽と地球、地球と月って感じの2体問題なら
宇宙全体が全体がスッキリ!します。
(研究員)太陽が月に関与してくると3対問題になって、動きがややこしくなるんだよな。
でも、ニュートンは万有引力っていってるし、
2対問題だけで、すべて説明するのは難しいんじゃないか。
(エンディ)まあそうだけどね
(研究員)太陽は動いているのに、
太陽が止まっているとみなしても
地球は太陽の周りをうまく回ります。
月は、地球の周りを回っていますが、
太陽の周りも地球といっしょに回っています。
しかし。月から見た地球は、止まっているとみなしても、
うまく説明がつきます。問題ありません。
(エンディ)そうだね、慣性の法則ににています。
太陽のトラックの荷台に、惑星が乗っていて、
惑星のトラックの荷台に、衛星が乗っている、
ようなイメージです。
(研究員)うちのカメたちも同じです。
ニュートンの「重力理論」は、
全ての天体は、関連しあって動いている。
つまり、ネットワーク構造です。
ネットワーク構造の場合、宇宙は複雑な動きをするはずです。
しかし、
太陽系の惑星、衛星の動きは、
宇宙は秩序を持って動いています。
言い過ぎかもしれませんが。そのように見えます。
それでは、そのあたりから研究をはじめてみますか。
そうしましょう
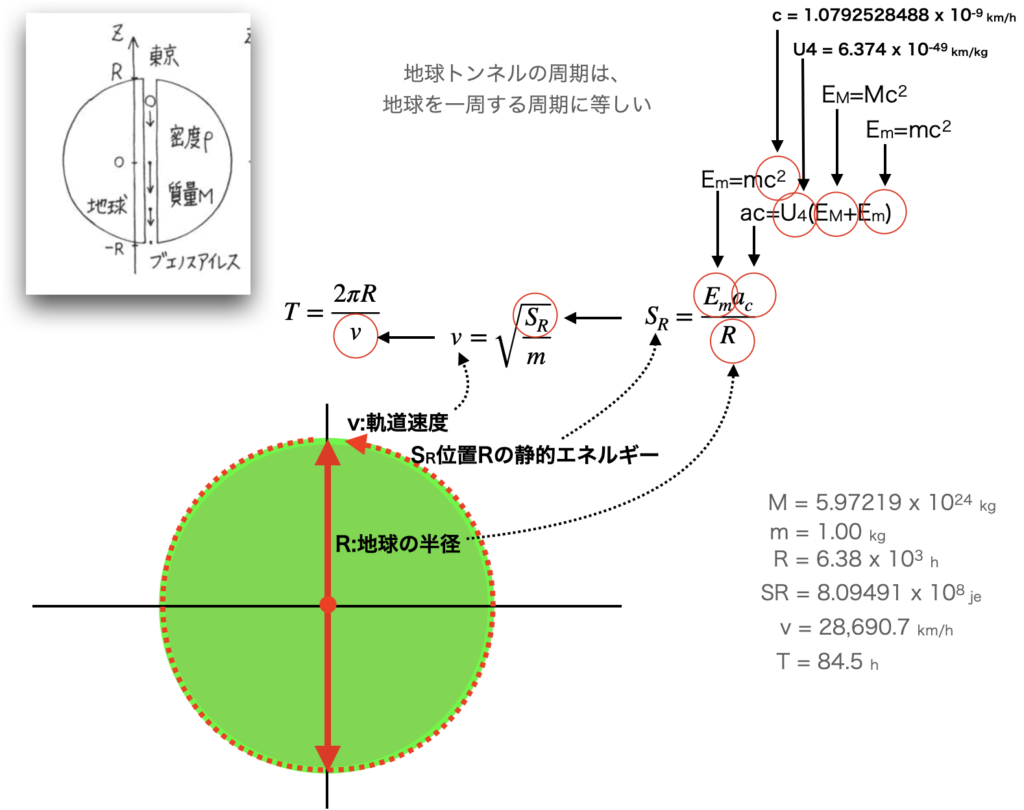
地球トンネルは、
もしも地球の内部にトンネルがあって、
ボールを東京から落として、
ブエノスアイレスまで行って帰ってくるという、
妄想的な思考実験です。
この時間は、次のように求めることができます。
結果は、84分くらいです。
はや!!
地球トンネルの理論を応用して、
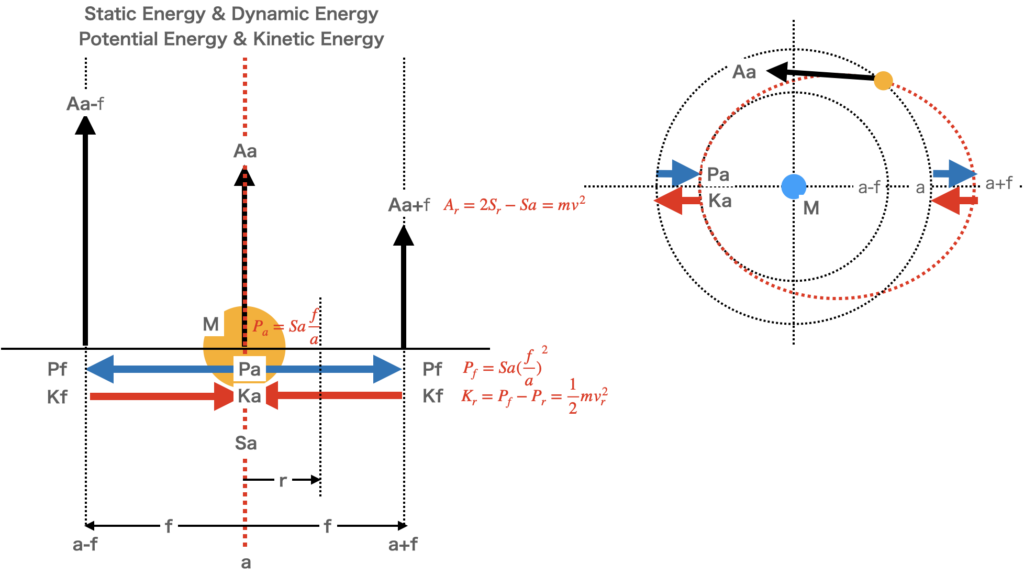
基準軌道を中心に振動する単振動を考えてみます。
基準軌道を中心とする単振動は、
運動エネルギーと位置エネルギーが保存するので、
基準軌道を中心として、単振動します。
基準軌道位置(a)の中心天体からの位置エネルギー(Pa)は、
Pa = Sa x (f/a)
になります。
基準軌道(a)から(f)離れた位置エネルギー(Pf)は、
Pf = Pa(f/a) = Sa(f/a)2
になります。
例えば、
光速 c = 1.0792528488 x 10+9 km
質量光速基準半径 U = 7.4243 x 10-31 km/kg
地球質量 M = 5.97219 x 10+24 kg
月質量 m = 7.34767 x 10+22 kg
基準軌道半径 a = 384,400 km
単振動振幅 f = 21,000km
Em = mc2 = 8.55845 x 10+40 kg(km/h)2
ac = U(M+m)= 4.4884 x 10-6 km
静的エネルギー Sa = Em x ac / a = 9.9933 x 10+29 kg(km/h)2
Pa = Sa x ( f / a ) = 5.4594 x10+28 kg(km/h)2
Pf = Pa x ( f / a ) = 2.9825 x 10+27 kg(km/h)2
vf = sqrt(Pf /m) = 201.47 km/h
単振動周期は
Tf = 2πf / vf = 654.91 h
基準軌道(a)の軌道周期(Ta)は、
Ta = 2πa / va = 654.91 h
Ta = Tf になります。
すなわち、単振動周期と軌道周期は同じになります。
双曲線軌道の最近点が、影響圏への侵入速度と入射角で計算できないかと、
考えていた分けですが、ちょっとわかったかもしれません。
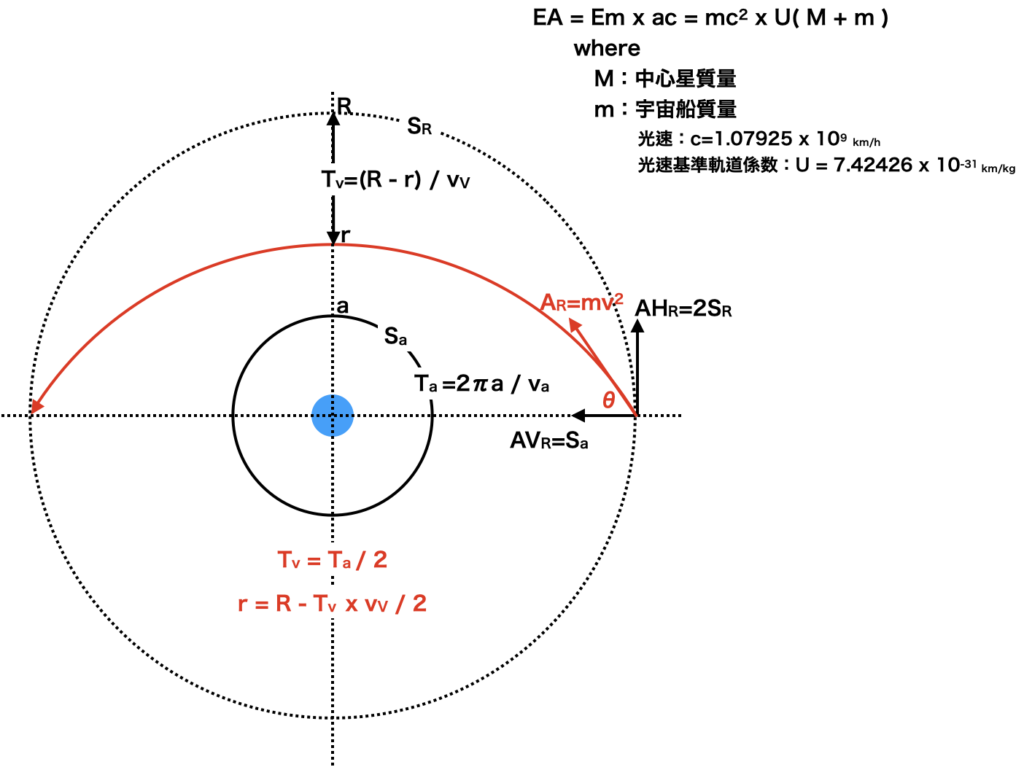
進入動的エネルギー AR(m kg x vR2 km/h)
進入角度θ deg
が既知の場合
■水平方向の動的エネルギーAHR = AR sin2θ kg(km/h)2
■垂直方向の動的エネルギーAVR = AR cos2θ kg(km/h)2
になります。
■基準軌道 静的エネルギー(Sa )
基準軌道半径aの静的エネルギーSaと同じ
Sa = AVR kg(km/h)2
になります。
■基準軌道半径(a)
宇宙船の質量をm
中心星の質量をM
質量エネルギーと光速基準軌道半径の積を
EA = Em x ac ( ==> mc2 x U( M + m )) kg(km/h)2km
: c=1.07925 x 109 km/h 、U = 7.42426 x 10-31 km/kg
とすると
基準軌道半径は、a = EA / AVR になります。
■基準軌道の公転周期(Ta)
位置aの軌道速度(va)は、va = sqrt(Sa/m) km/h
なので
Ta = 2πa / va h
になります。
■影響圏境界の静的エネルギー(SR)
位置Rで影響圏(S2静的エネルギー曲線)に侵入するので、
SR = AHR / 2 となります。
■影響圏侵入距離(R)
R = 2EA / AHRになります。
■垂直方向の平均速度(vV)
垂直方向の運動エネルギー(K)は、2SRなので、
vV = sqrt(2SR/m) / 2 になります。
■振動周期(Tv)
宇宙船は、影響圏侵入距離(R)から最近点(r)に到達して、
また影響圏侵入距離(R)に戻るので、
LV =(R – r)x 2 km(①式) 垂直方向に移動するので、
TV = LV / vV h(②式)
になります。
■最近点(r)
ここで、振動周期Tvは、
位置aの公転周期の半分 ( Ta /2) になるので、
①式と②式より
LV =(R – r)x 2 = Tv x vV
式を変形して
r = R – Tv x vV / 2
で算出できます。
具体例 木星の双曲線軌道
【設定値】
■中心星質量 M = 1.89813e27 kg
■宇宙船 m = 1.0e3 kg
■影響圏侵入動的エネルギー AR = 5.184e12kg(km/h)2
■影響圏進入角度 θ = 52度
【計算結果】
■水平方向の動的エネルギーAHR = ARsin2θ = 1.96494e12 kge(km/h)2
■垂直方向の動的エネルギーAVR = ARcos2θ = 3.21906e12 kg(km/h)2
■基準軌道の静的エネルギー Sa = AVR = 3.21906e12 kg(km/h)2
■基準軌道半径 a = 509,913 km
■基準軌道の公転周期 Ta = 56.470 h
■影響圏境界の静的エネルギー SR = AHR / 2 = 9.82470e11 kg(km/h)2
■影響圏境界の距離 R = 1,670,731 km
■垂直方向の平均速度 vV = 22,163.8 km/h
■振動周期 Tv = 28.235 h
■最近点 r = 1,357,838 km
近点移動は、衝突により、天体の質量が変化したために発生します。
多分、この理論は、まだ誰も考えていないはずです。
(静的エネルギー、動的エネルギー)で近点移動を考えていないからです。
とりあえず、
土星と月の2度の衝突について、プログラミングしてみた。
コメントがまだ全部に入れてないけれど、
だいたいの雰囲気は伝わるはずです。
プログラム(python)
import numpy as nm
#=============================================#
# CLASS : uniVerse
# 宇宙クラス
#=============================================#
class uNiverse:
c = 1.0792528488E+9 #光速(km/h)
U = 7.4242576375E-31 #質量・光速時基準軌道 変換定数 (km/kg)
CsS=1296000 #円周の秒数(秒)
CyT=8760 #年間時間(時間)
def Sa(self,M,m,a):
EA = self.EA(M,m)
Sa = EA/a
return Sa
def EA(self,M,m):
EA = self.Em(m) * self.ac(M,m)
return EA
def Em(self,m):
Em = m * self.c**2
return Em
def ac(self,M,m):
ac = self.U * (M + m)
return ac
def va(self,Sa,m):
va = nm.sqrt(Sa/m)
return va
#=============================================#
# CLASS : pLanet
# 惑星クラス
#=============================================#
class pLanet:
def A(self,m,v):
self.A = m * v**2
return self.A
def prt(self):
print(f”NAME ={self.name:10S}”)
print(f”mass ={self.m:.5e}”)
print(f”VELOCITY={self.v:.5e}”)
print(f”D.ENERGY={self.A:.5e}”)
#=============================================#
# CLASS : pLmove
# 惑星移動クラス
#=============================================#
class pLmove(uNiverse,pLanet):
def ax(self,Sa,EA,Ax):
self.a = EA/(Sa – Ax)
return self.a
def SRP(self,a,v):
self.SRP = 2 * nm.pi * a / v
return self.SRP
#=============================================#
# CLASS : iMpact
# 衝突クラス
#=============================================#
class iMpact(pLmove):
#
# pMove:衝突後の変化した分の質量
# <PRM> m:衝突前の天体の質量(kg)
# a:基準軌道半径(km)
# v:速度(km/h)
# margin:年間近点移動角度(秒)
# <RTN>
# SRP:公転周期(Sidereal Rotation Period)#self
# Ny:1年の公転回数 #self
# deG:1公転での近点移動角度 #self
# ΔT:1公転での近点移動時間(h) #self
# Tf:1公転での近点移動を含めた時間(h) #self
# mf:衝突後の天体質量(kg) #self
# Δm:衝突によって変化した分の質量(kg) #self+RTN
def iMpact(self,m,a,v,margin):
SRP = self.SRP(a,v)
Ny = self.Ny(SRP)
deg = self.deG(margin,Ny)
ΔT = self.ΔT(deg,SRP)
Tf = self.Tf(SRP,ΔT)
mf = self.mf(m,Tf,SRP)
Δm = self.Δm(mf,m)
return Δm,Tf
#
# Ny:1年の公転回数
# <PRM> SRP:公転周期 時間(h)
# <RTN> Ny:1年の公転回数
def Ny(self,SRP):
Ny=self.CyT / SRP
return Ny
#
# deG:1公転での近点移動角度
# <PRM> margin:近点移動年間移動角度(秒)
# <RTN> deG:1公転での近点移動角度(秒)
def deG(self,margin,Ny):
deG=margin/Ny
return deG
#
# ΔT:1公転での近点移動時間(h)
# <PRM> deG:1公転での近点移動角度(秒)
# <RTN> ΔT:1公転での近点移動時間(h)
def ΔT(self,deg,SRP):
ΔT = deg / self.CsS * SRP
return ΔT
#
# Tf:1公転での近点移動を含めた時間(h)
# <PRM> SRP:公転周期 時間(h)
# <RTN> Tf:1公転での近点移動を含めた時間(h)
def Tf(self,SRP,ΔT):
Tf = SRP+ΔT
return Tf
#
# mf:衝突後の天体質量(kg)
# <PRM> m :衝突前の天体の質量(kg)
# Tf:1公転での近点移動を含めた時間(h)
# SRP:公転周期 時間(h)
# <RTN> mf:衝突後の天体質量(kg)
def mf(self,m,Tf,SRP):
mf=m*(Tf/SRP)**2
return mf
#
# Δm:衝突によって変化した分の質量(kg)
# <PRM> m :衝突前の天体の質量(kg)
# mf:衝突後の天体質量(kg)
# <RTN> Δm:衝突によって変化した分の質量(kg)
def Δm(self,mf,m):
Δm = mf – m
return Δm
#
# iE:衝突エネルギー(je=kg*(km/h)2)
# <PRM> Sai:衝突前基準軌道の静的エネルギー(je)
# Sa :衝突後基準軌道の静的エネルギー(je)
# <RTN> iE:衝突エネルギー(je)
def iE(self,Sai,Sa):
return Sai-Sa
#
# iA:衝突位置の動的エネルギー(je=kg*(km/h)2)
# <PRM> Sai:衝突前基準軌道の静的エネルギー(je)
# iE :衝突後基準軌道の静的エネルギー(je)
# <RTN> iA:衝突エネルギー(je)
def iA(self,Sai,iE):
return Sai+iE
class SUN(pLmove):
def __init__(self):
self.name=”SUN”
self.m=1.9891e30
class EARTH(pLmove):
def __init__(self):
self.name=”EARTH”
self.m = 5.97219e24
self.a = 147077401
self.ρ = 5.51e12 #密度
self.margin = 11.45 #秒
class MOON(pLmove):
def __init__(self):
self.name=”EARTH-MOON”
self.m = 7.347673e22
self.a = 356400
self.ρ = 3.344 #密度
self.margin = 360*3600/8.85 #秒
# self.margin = 0
class SATURN(pLmove):
def __init__(self):
self.name=”SATURN”
self.m = 5.68319e26
self.a = 1349823615
self.ρ = 0.687e12 #密度
self.margin = 162.9 #秒
#
# FUNCTION
#
def prBase():
print(f”<===== {pln.name:10s} IMFORMATION =====>”)
print(” “)
print(f”Mass ={pln.m:.5e}kg”)
print(f”a ={pln.a:.5e}km”)
print(f”ρ ={pln.ρ:.5e}kg/km3″)
print(f”margin ={pln.margin:.5e}秒”)
print(” “)
return
def prImpact():
return
def clImpact():
m = pln.m
a = pln.a
margin = pln.margin
Sa = pln.Sa(M,m,a)
va = pln.va(Sa,m)
v = va
ai = pln.ax(Sa,pln.EA(M,m),Ai)
Sai = pln.Sa(M,m,ai)
vi = pln.va(Sai,m)
SRP = pln.SRP(ai,vi)
(Δm,Tf) = imp.iMpact(m,ai,vi,margin)
iE = imp.iE(Sa,Sai)
print(“< IMPACT IMFORMATION >”)
print(” “)
print(f”Sa = {Sa:.5e}je”)
print(f”Ai = {Ai:.5e}je”)
print(f”ai = {ai:.5e}km”)
print(f”vi = {vi:.5e}km/h”)
print(f”SRP= {SRP/(365*24):.5e}year ({SRP:.5e}hour)”)
print(f”Tf = {Tf:.5e}hour”)
print(f”Δm = {Δm:.5e}kg”)
print(f”mx = {m+Δm:.5e}kg”)
print(f”iE = {iE:.5e}je”)
print(” “)
return
#
# MAIN ROUTINE
#
#
#—– SUN —–
#
sun = SUN()
M = sun.m
#
#—– SATURN —–
#
imp = iMpact()
pln = SATURN()
prBase()
Ai = 3.9018993407E+34
clImpact()
#
#—– EARTH – MOON 1 —–
#
ert = EARTH()
M = ert.m
imp = iMpact()
pln = MOON()
pln.a = 356400
prBase()
Ai = 1.2553914256E+28
clImpact()
#
#—– EARTH – MOON 2 —–
#
ert = EARTH()
M = ert.m
imp = iMpact()
pln = MOON()
pln.a = 363400
pln.margin = 0
prBase()
Ai = 5.7748974729E+28
clImpact()
【実行結果】
<===== SATURN IMFORMATION =====>
Mass =5.68319e+26kg
a =1.34982e+09km
ρ =6.87000e+11kg/km3
margin =1.62900e+02秒
< IMPACT IMFORMATION >
Sa = 7.24428e+35je
Ai = 3.90190e+34je
ai = 1.42667e+09km
vi = 3.47279e+04km/h
SRP= 2.94659e+01year (2.58121e+05hour)
Tf = 2.59077e+05hour
Δm = 4.21756e+24kg
mx = 5.72537e+26kg
iE = 3.90190e+34je
<===== EARTH-MOON IMFORMATION =====>
Mass =7.34767e+22kg
a =3.56400e+05km
ρ =3.34400e+00kg/km3
margin =1.46441e+05秒
< IMPACT IMFORMATION >
Sa = 1.07784e+30je
Ai = 1.25539e+28je
ai = 3.60600e+05km
vi = 3.80767e+03km/h
SRP= 6.79270e-02year (5.95041e+02hour)
Tf = 5.99608e+02hour
Δm = 1.13225e+21kg
mx = 7.46090e+22kg
iE = 1.25539e+28je
土星の場合
Δm = 4.21756e+24kg 質量が増えて
近点移動 1.62900e+02秒 がおこります。
月の1回目の衝突の場合
Δm = 1.13225e+21kg 質量が増えて
近点移動 1.46441e+05秒 がおこります。
が計算結果からわかります。
月の2回目の衝突の場合は、みなさんで計算してみてください。
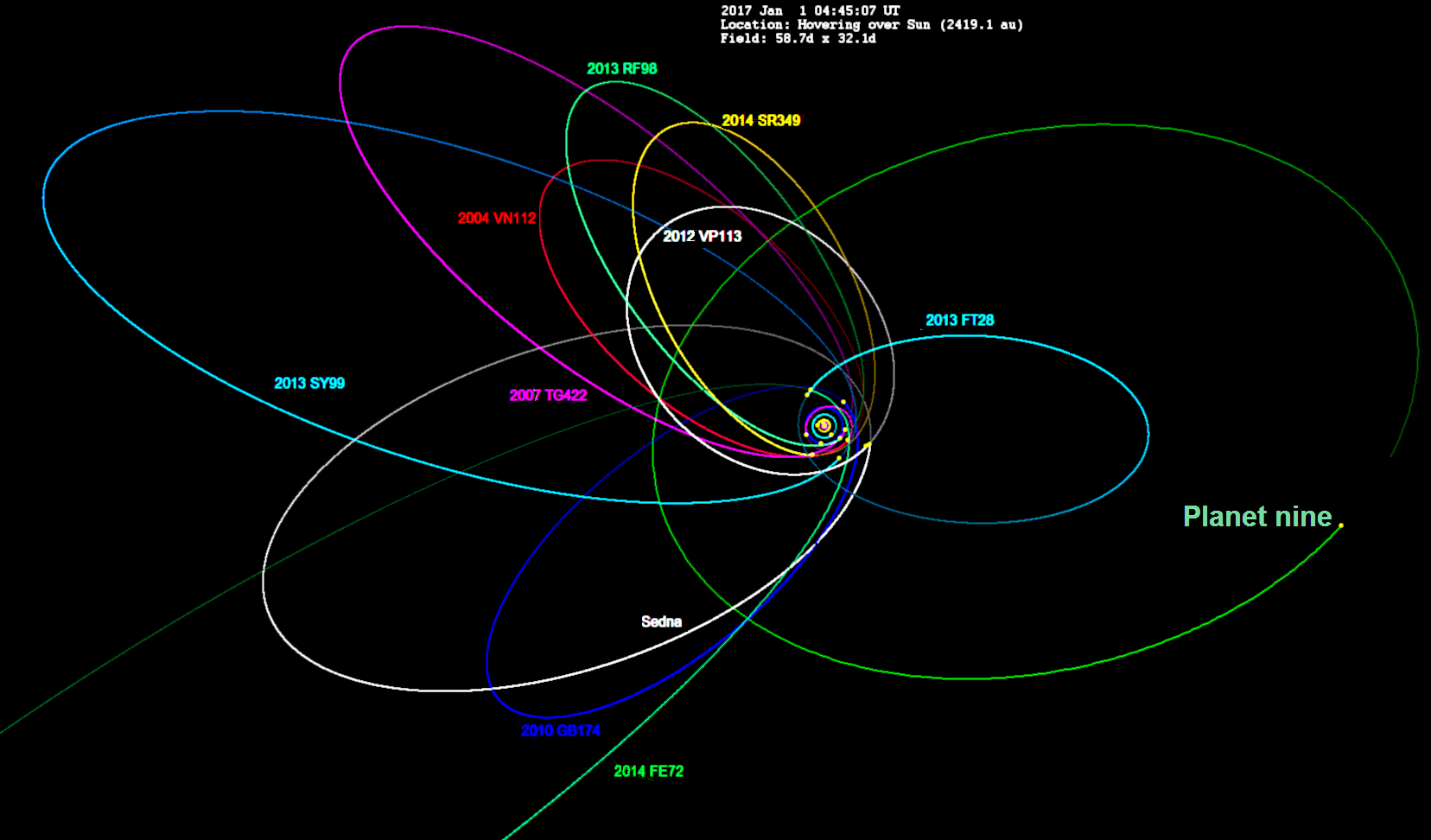
カイパーベルトあたりの天体で気になる天体があります。
セドナです。
なぜかというと、軌道周期が、11000年くらいで、
遠点が、1012au、近点が76auという超楕円軌道上を動いているからです。
近点76auがどのくらいかというと、冥王星の2倍くらいの距離です。
気が遠くなるほど、遠くです。
さらに、直径が1000km弱というあまり大きくない。
地球の直径は12,600kmくらいなので、如何に小さいかがわかります。
それをよく見つけたと凄いなと思います。
そのあたりの、天体としては、ハウメア、マケマケなどがあります。
たしか準惑星になったと思います。
その天体も興味あります。
が
セドナの超楕円軌道は、原因含めてくらべものにならないくらい興味がわきます。
なぜ、そのような軌道になったかというのは、諸説ありますが、
プラネットナインの存在が浮上してます。
超楕円軌道の原因
軌道は、円軌道が基本で、衝突よって楕円軌道になるという持論からすると、
プラネットナインは無いと考えます。
つまり、現在の軌道の近点または遠点で衝突が起きたと推測します。(近点=近日点、遠点=遠日点)
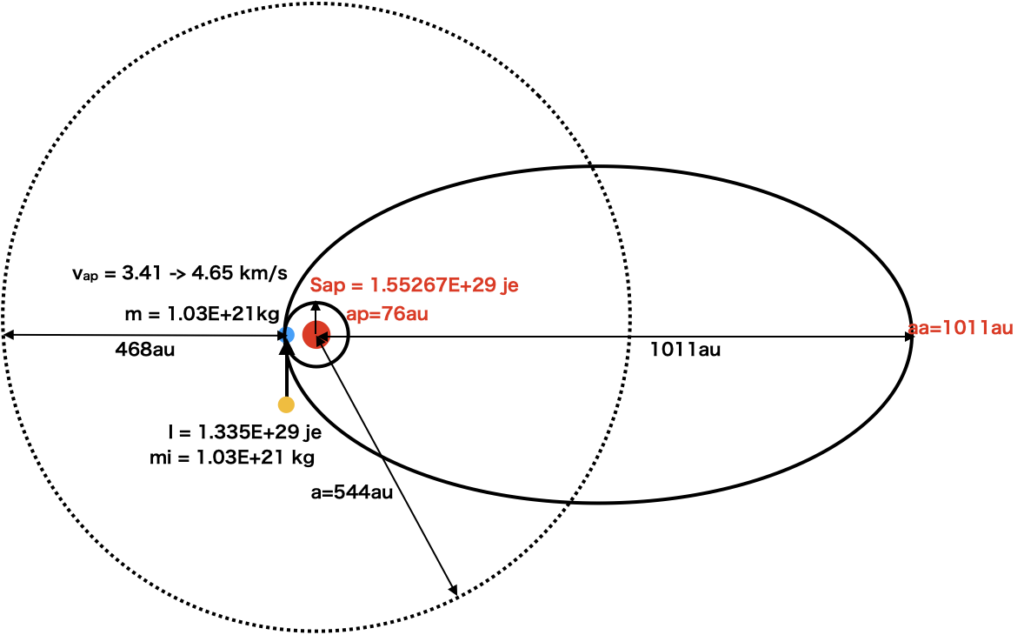
近点で衝突したケース
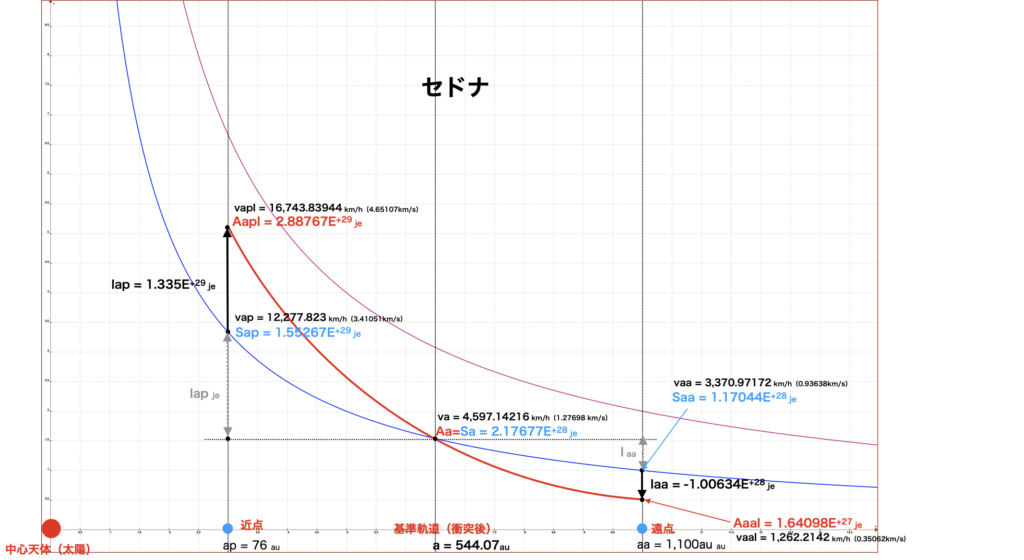
近点(76au)で円軌道上を動いていたとすると、
秒速約3.4kmで動いています。
他の天体がセドナに、衝突エネルギー(Iap)は、約1.335E+29 je(kg*(km/h)2)
で衝突すると、
衝突後の基準軌道(a)は544auになります。
(計算方法)
Sap:静的エネルギー= 1.55267E+29 je
Em :質量エネルギー(mc2 ) =1.19973E+39 je
ac:光速時基準軌道半径(ac)= 1.47676 km
【衝突後の基準軌道半径】
a = Em x ac /(Sap -Iap) = 8.13917E+10 km = 544.07au
(実際の計算は、基準軌道と近点静的エネルギーより、衝突エネルギー(I)を計算した)
【衝突天体】
衝突天体質量が、セドナの10分の1位だとすると、(直径だと4〜500kmくらい)
セドナに対する相対速度に対して、約秒速10kmで衝突したくらいになります。
衝突後の近点速度は毎秒4.65kmになります。(遠点では、毎秒3.3kmになります。)
衝突後の遠点は、1011auになります。
計算してみると、劇的な変化でないのに、太陽から遠くの軌道となると、
かなり楕円軌道が長くなることがわかります。
遠点で衝突したケース
近点(1100au)で円軌道上を動いていたとすると、
秒速約0.94kmで動いています。
他の天体がセドナに、衝突エネルギー(Iaa)は、約 Iaa = -1.00634E+28 je(kg*(km/h)2)
で衝突すると、(セドナの進行方向逆向き)
衝突後の基準軌道(a)は544auになります。
(計算方法)
Saa:静的エネルギー= 1.17044E+28 je
Em :質量エネルギー(mc2 ) =1.19973E+39 je
ac:光速時基準軌道半径(ac)= 1.47676 km
【衝突後の基準軌道半径】
a = Em x ac /(Saa -Iaa) = 8.13917E+10 km = 544.07au
(実際の計算は、基準軌道と近点静的エネルギーより、衝突エネルギー(I)を計算した)
【衝突天体】
衝突天体質量が、セドナの10分の1位だとすると、(直径だと4〜500kmくらい)
セドナに対する相対速度に対して、約秒速10kmで衝突したくらいになります。
衝突後の遠点速度は毎秒0.351kmになります。(近点では、毎秒4.65kmになります。)
衝突後の遠点は、76auになります。
計算してみると、劇的な変化でないのに、太陽から遠くの軌道となると、
かなり楕円軌道が長くなることがわかります。
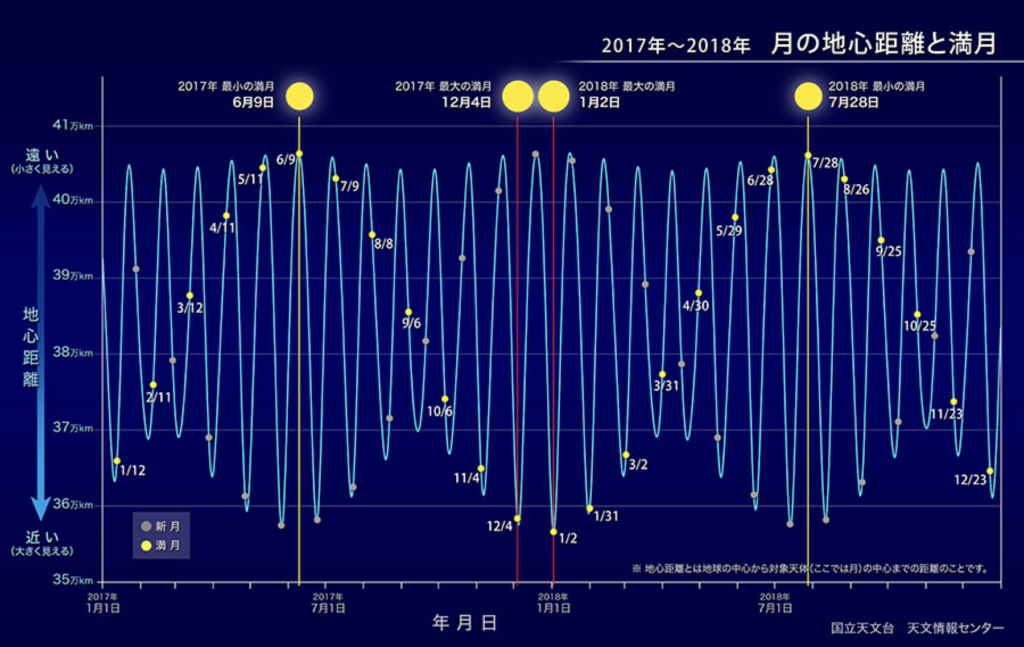
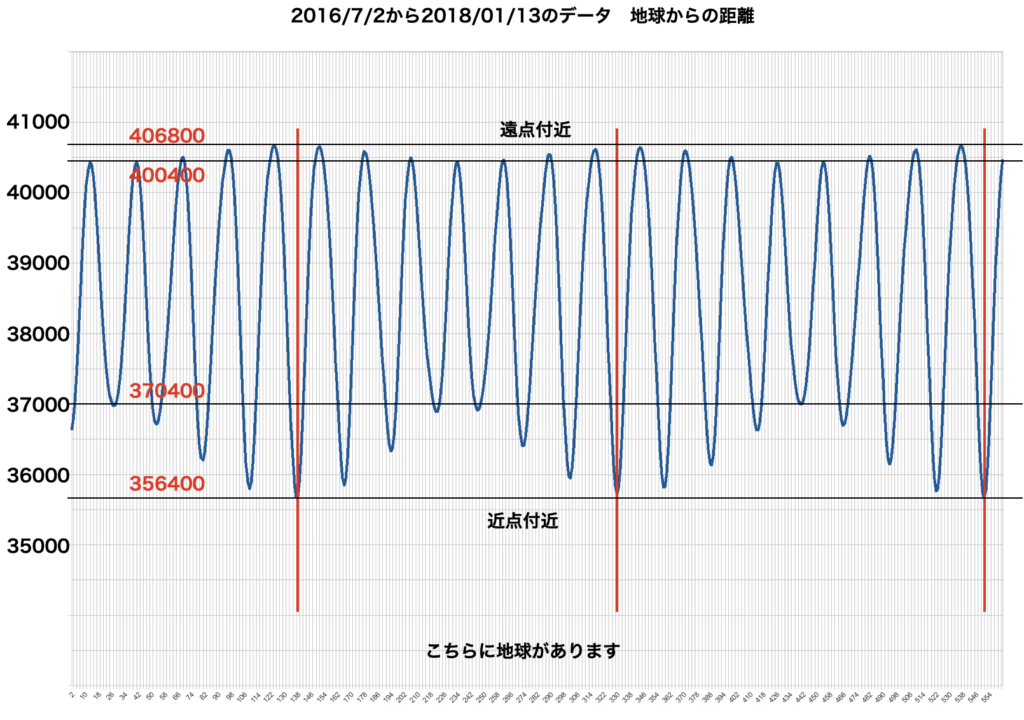
月は、スーパームーンを代表とする、月と地球の距離が遠かったり近づいたりします。
楕円軌道上を動いています。(国立天文台の地心距離を参考にしてください)
少し説明すると、
地球の中心から月の中心までの距離を「地心距離」といいます、
地心距離については、国立天文台の地心座標で計算できます。
wikiぺディアによると
現在の月の平均軌道半径(基準軌道半径)384,400 kmです。
地球に近い時(ある期間で一番近い時を最近では「スーパームーン」といいます)
近点:354,400 km~370,400kmと幅があります。
地球から一番遠い時
遠点:404,064 km~406,712km
と同様に幅があります。
普通の天体は、近点と遠点が「固定」なのですが、(ケプラーの第一法則「惑星は楕円軌道」になります)
月は遠点と近点が「変動」します。(他にもあるかもしれませんが、月が一番わかりやすい動きをします)
それが月の軌道はエキセントリックと言われる所以です。
月の地心距離のモデリング
国立天文台の理論は、太陽の影響という理論です。
「出差」「二均差」「年差」「中心差」によるということです。
詳しくは、国立天文台の月の公転を参照ください。
太陽の影響と考えると、不確定性の事項が多くて、
自分の中では、納得できなかったので、
次のような、仮定を立ててみました。
月のエキセントリックな軌道の原因は、
このホームページのタイトルになっている、
「Once upon a time the moon impacted twice.」(月は、かつて2度の衝突があった)
というのが、独自理論です。
月へ小惑星が二重衝突したという推論です。
2度衝突するとなぜ、エクセントリックな軌道なる過程を説明します。
エキセントリックな軌道になる過程
2重衝突の距離関係は次の図のようになります。
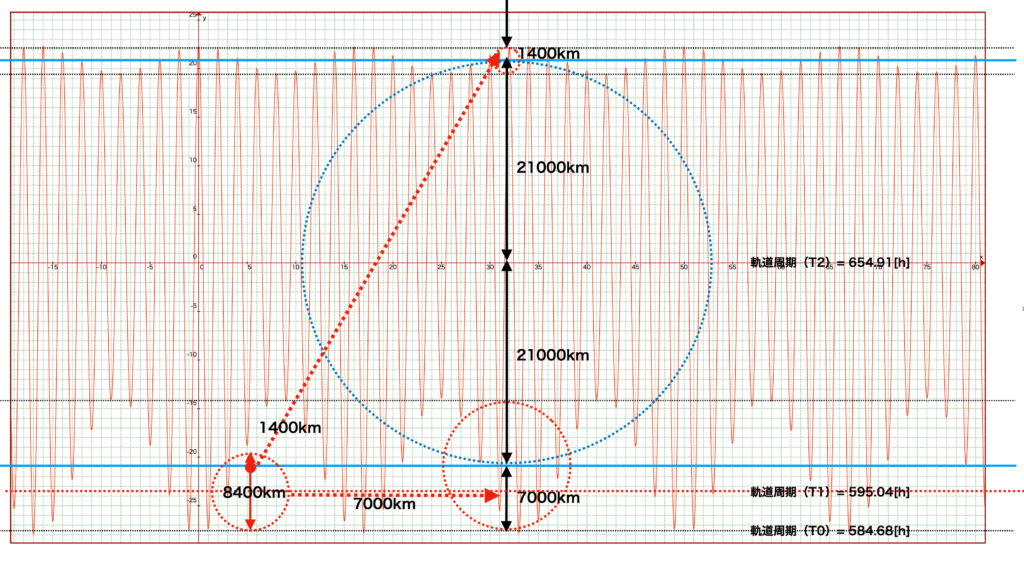
(1)当初
月は基準軌道半径356,400kmで円軌道上を動いていました。
軌道周期(T0)= 584.68(h)になります。
(2)①-1 第1衝突
【衝突位置】
当初の基準軌道356,400kmで月は小天体と衝突しました。
【基準軌道移動】
基準軌道は、360,600km(①-2)になりました。
【振動】
第1衝突により、振幅4,200kmの振動(①-3)する軌道になりました。
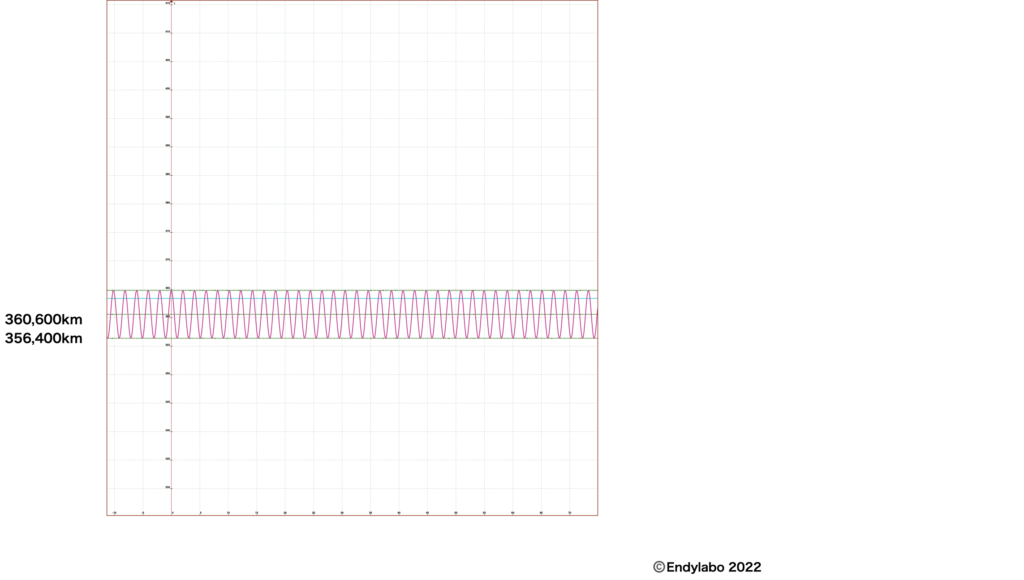
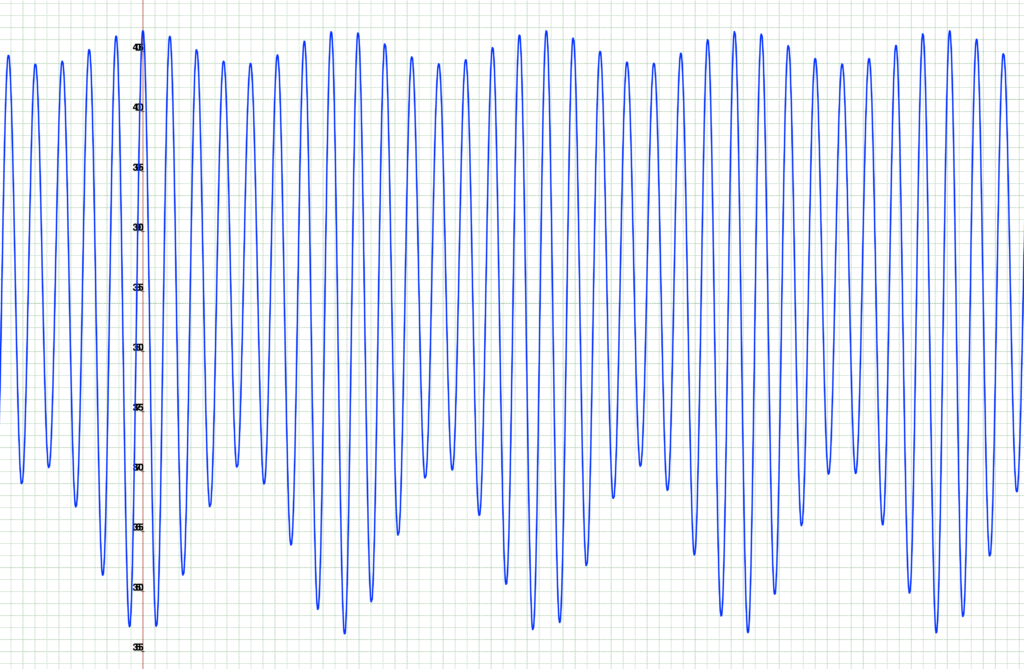
次のような地心距離のグラフになります。
この衝突により、軌道周期(T1)= 595.67(h)になります。
うなり率(β1)= (595.67 – 584.68)/584.68 = 0.01773
となりますが、当初の軌道が円軌道なので、うなりは発生しません
第2衝突により、360,600km を基準軌道として、
振幅4,200kmの振動(①-3)が発生しました。
この振動の近点は、衝突位置の 356,400km
この振動の遠点は、360,600km+4,200km=364,800km
この衝突により、軌道周期(T1)= 591.57(h)になります。
(3)②-1 第2衝突
【衝突位置】
第1衝突後の軌道、楕円軌道(振幅4,200kmの基準軌道(360,600km))の
基準軌道(360,600km)から2,800kmのところ(363,400km)で、
小惑星と月の第2衝突が発生しました。
【基準軌道移動】
現在の基準軌道、363,400km+21,000km(384,400km)(②-2)になりました。
【振動】
第2衝突により、384,400km を基準軌道として、
振幅21,000kmの振動(②-3)が発生しました。
この振動の近点は、衝突位置の 364,400km
この振動の遠点は、384,400km+21,000km=405,000km
この衝突により、軌道周期(T2)= 630.61(h)になります。
【第1衝突の振動】
第1振動は、第2衝突により、
衝突位置363,400kmで、
振動幅8400km(振幅4,200kmの2倍)が
1400km(②-4)と7000km(②-5)の
2つに分裂
1400km(②-4)は、振幅21,000kmの振動(②-3)の遠点で振幅1,400km(振動幅2,800km)
7000km(②-5)は、振幅21,000kmの振動(②-3)の近点で振幅7,000km(振動幅14,000km)
で振動します。
近点と遠点は
近点で一番地球から遠いところが 363,400km + 7,000km = 370,400km
近点で一番地球から近いところが 363,400km – 7,000km = 356,400km
近点で一番地球から遠いところが 363,400km + 7,000km = 370,400km
近点で一番地球から近いところが 363,400km – 7,000km = 356,400km
となります。
【うなり】
当初、軌道周期(T0)だった軌道が、
第1衝突で、軌道周期(T1)になり、
第2衝突で、軌道周期(T2)になったため
うなり率は、T0からT2に変化したので、
うなり率(β2)= (T2-T0) / T0 = 0.12013
となります。
この周期の差が、うなり軌道の原因になります。
β = (654.91 -584.68) / 584.68 = 0.12013
【軌道周期】
当初の軌道周期(T0)= 584.68(h)と
第1衝突後の軌道周期(T1)= 595.04(h)
第2衝突後の軌道周期(T2)= 654.91(h)
の3種類の軌道周期が発生します。
軌道周期(T0)と軌道周期(T2)の比率を
周期率 α = T0 / T2
となります。
α = 584.68 / 630.61 = 0.89275 になります。
【二重衝突地心距離 計算式】
上記の値を利用して、地心距離をグラフにしてみます。
地新居英は、つごの式で表されます。
地心距離(R)= (A1cos(απx) – ΔIp) x cos(βπx) + A2cos(απx) +a2
月の例
(1)基準軌道(当初) a0 = 356400 km
(2)基準軌道(第1衝突後)a1 = 360600 km
(3)基準軌道(第2衝突後)a2 = 384400 km
(4)第1衝突後の振幅 A1 = 4200 km
(5)第2衝突位置 Ip = 7000 km (from a0) ->ΔIp = Ip – A1 = 2800 km
(6)第2衝突後の振幅. A2 = 21000 km
(7)周期率 α = 0.89275
(8)うなり率 β = 0.12013
この値で、グラフにすると
1/1000スケールにしました
y=(4.2cos(pi*x*0.89275)-2.8)cos(pi*x*0.12013)+21cos(pi*x*0.89275)+384.4
となります。
これは、1番上の『国立天文台の地心距離2017〜2018』のグラフと同じような動きをします。
細かい部分は調整が必要ですが、
理論的には、説明が付きます。
おそらく、他の細かい衝突の影響あり、現在の月軌道に合わせるには、工夫が必要ですが、
大方、この大きな2つの衝突で、現在の軌道が説明できます。
次の手順で証明をします。
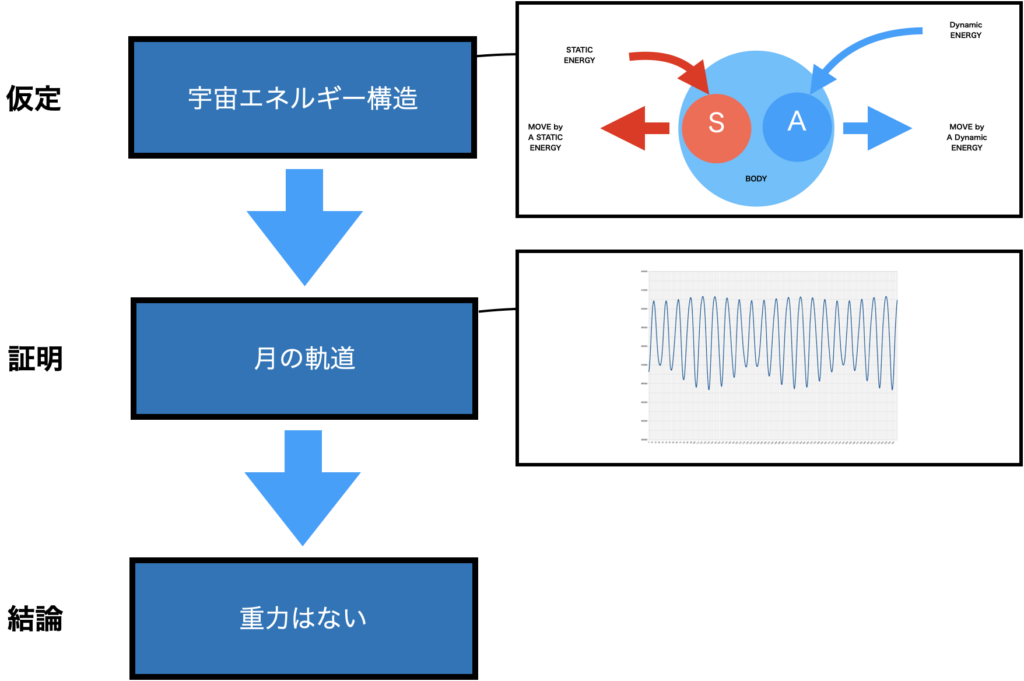
(1)仮定
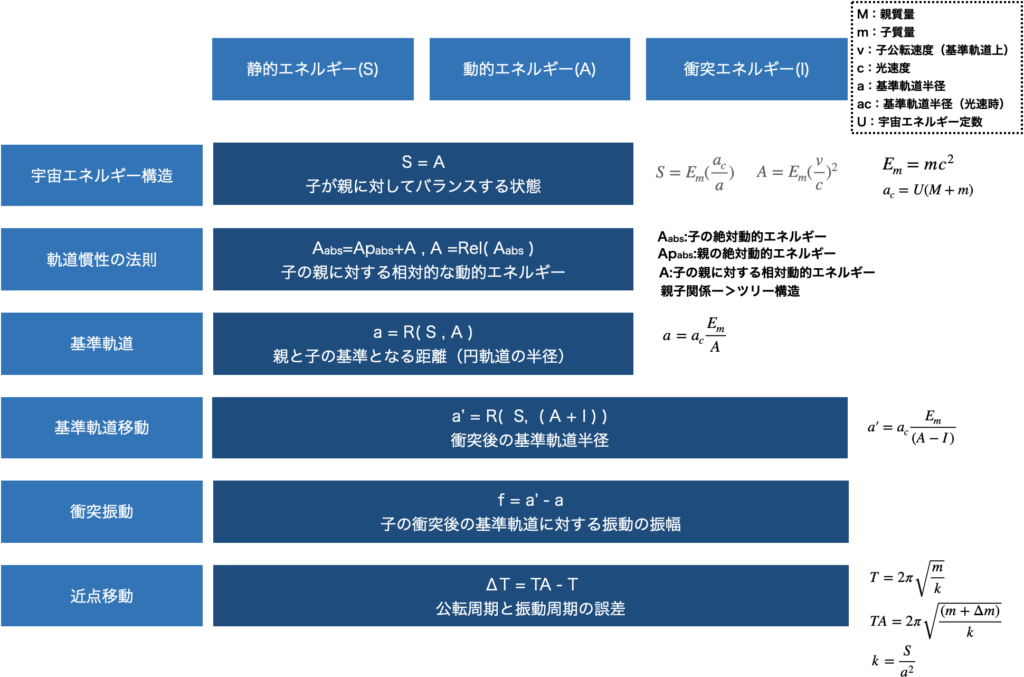
天体は、「静的エネルギー」と「動的エネルギー」のバランスによって、両方のエネルギーがバランスする方向に移動する。(これを「宇宙エネルギー構造」と呼ぶ事にします。)
●「静的エネルギー」は、2天体間の距離に反比例して、宇宙から供給されるエネルギー(中心天体方向に動く)
●「動的エネルギー」は、外部からの衝突、内部の爆発などによって、天体を動かすエネルギー(中心天体と反対の方向に動く)
●衝突によって、天体の質量が変化する
(2)証明項目
月のエキセントリックな軌道を、(1)の仮定だけで証明する。
●エキセントリックな軌道とは、遠点、近点の位置が一定ではない。
●8.85年で近点が一周する
(3)結論
●①天体は、円軌道上を動く
●②静的エネルギーと動的エネルギーのバランスする位置は基準軌道になる
●③天体同士の衝突により、動的エネルギーの変化により、基準軌道(②)が移動して、基準軌道を中心に振動をして、見かけ上楕円軌道になる(すべての楕円軌道にあてはまる)
●④近点移動は、衝突による質量が変化した事による振動周期(③)の変化(全ての近点移動にあてはまる)
●⑤遠点と近点が一定でないのは、月に小惑星が2度衝突して、うなり軌道になったため
【補足】
○①は、ケプラーの第一法則とは異なります(楕円軌道の特殊な形態が円軌道)
○④は、正しければ、アインシュタインの相対性理論の裏付けの水星の近日点移動が怪しいことになります
○⑤は、正しければ、月のエキセントリック軌道は、太陽の重力以外でも説明できたことになります。
いままで、ニュートンやケプラーの法則から、『宇宙エネルギー構造』の理論を説明してきました。
おそらく、その方がわかりやすいのではないか。
また、現在ある理論を使った方が、間違った方向にいかないのでは無いか、
と思いそのように説明してきました。
しかし、
インパクトが少なくて、読む人(目に止まる人)が少ないというのが現状です。
兎角この様な話は、専門家にしか興味がないというのが、セオリーです。
というか、あまり広報していないのが原因のひとつですが。
なにはともあれ、
このサイトの意図としては、宇宙は力でバランスしているのではなくて、エネルギーでバランスしています!
ということをいいたいわけです。
どこが違うかというと、天体の軌道を力の作用反作用のバランスで考えるのか、または天体自身が保持しているエネルギーがバランスする方向に動くかということです。
力はそもそもその力はどうして働いているのか?ロープで繋がっているわけでは無いわけなのでもないのに。
という疑問が発生します。
エネルギーで考えると、天体自身が2つのエネルギーを持っていて、そのエネルギーと宇宙が与えてくれたエネルギーでバランスするところに天体が居座る、もしくは移動すると考えれば、見えないロープ?は必要無くなるわけです。
確かに、アインシュタインの様に、宇宙空間が天体の質量で歪んでいるっていう考えもあるかもしれませんが、それはそれで、重力レンズなので照明されているので、あえて否定はしませんが、重力レンズの効果が宇宙空間の歪み以外で起こるとすれば、それも疑わしいことになります。今のところ、アインシュタインの一般相対性理論以外では証明されていませんが。(ブログ「光もスイングバイ」を参照してみてください)
そこで、独自に理論を打ち立て、宇宙構造を解体したいと思います。
それが「宇宙エネルギー構造理論」です。
コンテンツは、こんな感じです。
結論から言うと
タイトル『重力は無いですよ!』
です。
それでは、ニュートンの「プリンキピア」風に仮定と定義を記述します。
—————————————————————————–
【仮定1】(「宇宙エネルギー構造」)
宇宙の静的エネルギー(S)と天体の動的エネルギー(A)は、2天体間でバランスする。
【補足】
●「静的エネルギー」は2天体間で発生する宇宙空間のエネルギー。
(2天体間の距離が大きくなるほど小さくなる)
●「動的エネルギー」は天体が動くために天体自身に保持しているエネルギー。
(天体の速度が速くなるほど大きくなる)
【仮定2】(「軌道慣性の法則」)
「親」の静的エネルギーと動的エネルギーは「子」に継承する。(親子関係)
親子関係は必ず存在して、天体は「ツリー構造」になっている。(=すべては2体問題で解決)
【補足】
●2天体の質量の大きい天体を「親」、質量の小さい天体を「子」とする
【仮定3】(「基準軌道」)
S(「静的エネルギー」) = A(「動的エネルギー」)の位置(a…基準軌道半径)で、円軌道上を「子」は移動する。
【仮定4】(「基準軌道移動」)
「子」に他の天体などが衝突した場合、「子」の動的エネルギーが変化し、静的エネルギーと動的エネルギーがバランスする方向に移動する。そして、「基準軌道半径」が移動する
【仮定5】(「衝突振動」)
「基準軌道移動」が発生すると、移動先の「基準軌道半径」を中心に、近点または遠点からの距離を振幅に振動する。
【仮定6】(「近点移動」)
「公転周期」と「振動周期」が異なる時に近点移動が発生する。
基本は「公転周期」=「振動周期」ですが、衝突などにより、天体の質量が変化すると、
振動周期が変化し、「公転周期」と「振動周期」が異なり、近点移動が発生する。
—————————————————————————-
【定義1】(静的エネルギーの大きさ)
S=Em x (ac/a)
Em:質量mの質量エネルギー(mc2)
sc:光速時の基準軌道半径
a : 基準軌道半径
【定義2】(「動的エネルギー」の大きさ)
A=Em x (v/c)2
Em:質量mの質量エネルギー(mc2)
v:天体の速度
c:光速度
【定義3】(「公転周期(T)」)
「子」が「親」の周りを1周回る時間
【定義4】(「振動周期(TA)」)
「子」が「親」の周りを、近点から近点、または遠点から遠点まで戻ってくるまでの時間
を、前提として、「重力はない」へと論破したいと思います。
前ブログで、「引力」に地球などの自転の遠心力を加味したのが「重力」というのを説明しました。
厳密に言えば違いますが、ここでは同じとみなして話を進めます。
ニュートンの登場
「引力」に気がついたのは、かのニュートンです。
ニュートンは、万有は引っ張りあっていると思いつき、
全てのものは引力で引っ張りあっているという結論に達したのでした。
だから、
地球は月を引っ張る!「万有引力」。
地球は林檎を引っ張る!「万有引力」。
ってところまでは、まあまあよかったのですが、
力は「作用反作用」という原理があるので、
月は地球を引っ張る!「万有引力」。
林檎は地球を引っ張る!「万有引力」。
ということで、2体(地球と月)は宇宙空間で、
次第に両方動いてくっついてしまうという現象が起きることになってしまった。
さらに、「引力」自体がどうして発生するのかという根本的な原因は、
ニュートンは説明できずに亡くなってしまいました。
アインシュタインの登場
300年くらい経って、アインシュタインが登場しました。
アインシュタインは、光速度一定の原理から「特殊相対性理論」を確立しました。
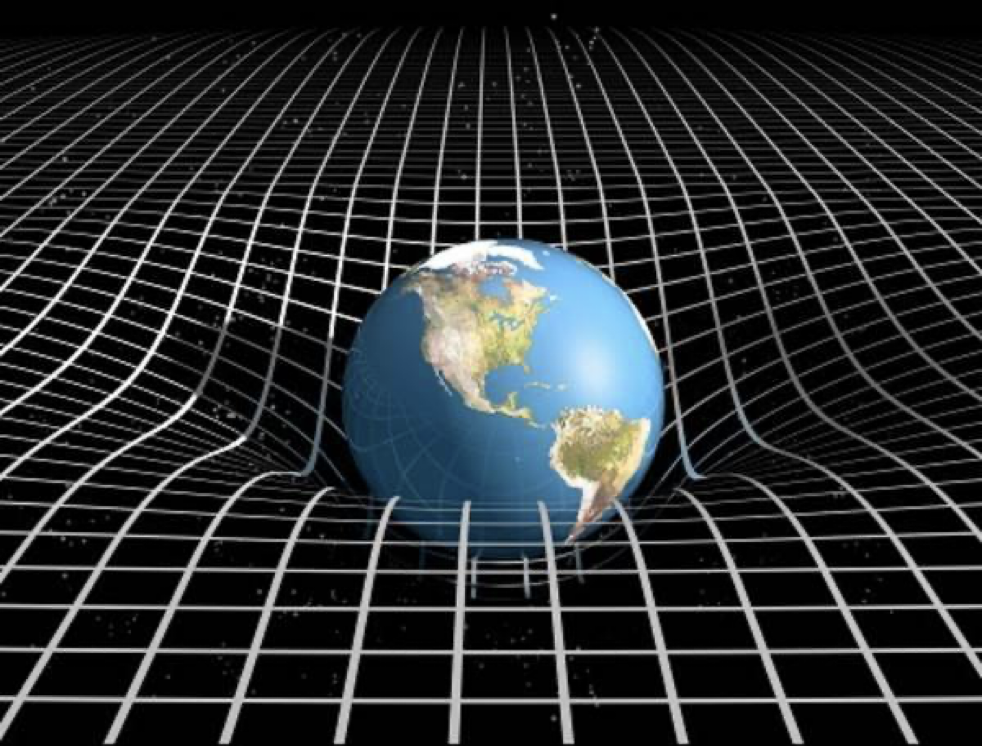
10年後に時間と空間を合わせた時空という概念を創作し「一般相対性理論」確立しました。
簡単にいうと、時間と空間は相対的なもので、質量(重量とは異なりますが、何の影響も受けない本質的な重さのことです。概念的には重量と思ってOKです)によって、時空が歪むということです。
その時空の歪みこそが「重力」の原因ということです。
天体は、その歪みに沿って落ちていく。
よく見るイメージ図はこんなのです。

まあ、地球の質量程度では、時空の歪みはほんの少しですが、
太陽の質量程度になると、時空の歪みがわかるようになります。
時空の歪みに入ると、天体は中心に向かって落ちていくというイメージです。
さらに、アインシュタインは、時空の歪みによる「重力レンズ」を予想しました。
「重力レンズ」が証明されたのは、
見えないはずの天体(たいようの後ろに隠れている天体)が、日食の時に見えた!
ってことで、重力が凸レンズの役割果たした!
ということです。
さらに、「水星の近点移動の誤差」を「時空の歪み」で証明できたことです。
水星軌道は、近点が100年で575秒(1秒は1度の3600分の1)移動することはわかっていました。
原因は、「摂動」(他の惑星の引力による影響)ということになっていました。
厳密に「摂動」の影響を計算した結果、528秒くらいまでは、わかったのですが、
残りの47秒の原因は「摂動」では、説明できませんでした。
そもそも、575秒を観測した人はすごいですが!
その47秒の誤差を、「時空の歪み」で説明できた!ということです。
だから、「時空の歪み」(一般相対性理論)は正しいということになりました。
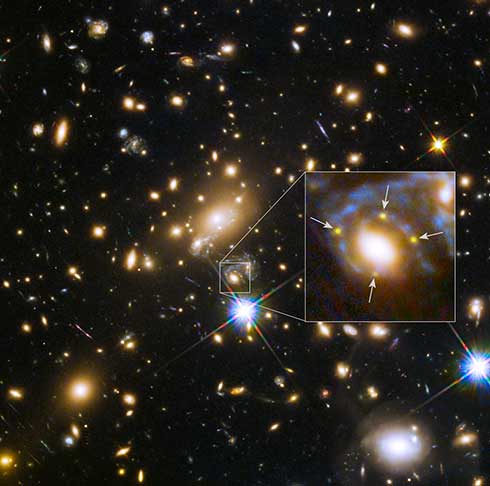
アインシュタインは他に、「重力波」とか「ブラックホール」などを予想しましたが、
「ブラックホール」は最近、画像を写すことができて話題になりました。
「重力波」については、科学者たちが捉えようと、躍起になっています。
謎について
アインシュタインにより「重力」の原因が解けた!
と思いましたが、もう一度よく考えてみます。
「水星の近点移動の誤差」と「重力レンズ」の原因が、「時空の歪み」でないとしたら、
「一般相対性理論」は、もしかしたら違っているかもしません。
そもそも、近点移動が起れば、楕円軌道でないわけです。
つまり、厳密には「ケプラーの第一法則」は成り立っていないわけです。
「水星の近点移動の誤差」の謎
前ブログで、天体は「ツリー構造」をしています。と結論付けました。
この考え方からすると、そもそも「摂動」は発生しません。
つまり、「水星の近点移動」の原因は、「摂動」以外で説明できなければいけません。
詳しくは、「近点移動」のところで説明しますが、
簡単にいうと、
水星に小惑星が衝突した時に、
水星の質量が変化したことが原因です。
つまり、バネに錘がついているのを想像してみてください。
それを、引っ張って振動させます。
そうすると、上下に錘は振動します。
その錘を重くすれば、ゆっくり振動します。軽くすれば、早く振動します。
この原理を利用すると、
水星が基準軌道を中心に振動していたとします。
これは、見かけ上「楕円軌道」になります。
その水星に小惑星が衝突したとします。
そして、小惑星の一部が水星に残ったとします。
そうすると、水星の質量が増えます。
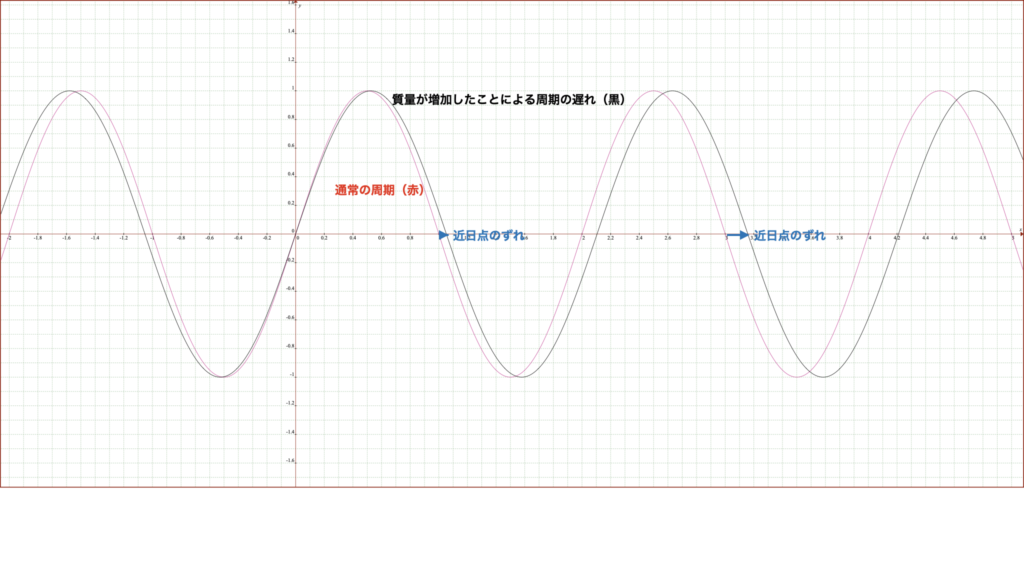
水星の質量が増えたことによって、振動が遅くなります。
振動が遅くなることによって、
1振動してに戻ってくるまでに時間がかかるわけです。
この遅れが、見かけ上、近点が移動したように見えます。
質量の変化が近点移動の原因です。
とすると、
水星の近点移動の100年575秒はすべて、質量変化が原因と考えられます。
計算した結果は、このブログに書きました。
原理は、このブログに書きました。
参考にしてください。
これが正しければ、「一般相対性理論」の牙城が崩れます。
「重力レンズ」の謎
重力レンズは、光は質量がないから、重力の影響を受けない!
だから、見えないはずの天体がみえる!
っていうのは、時空が歪んでいるからだ!
というのが「一般相対性理論」を使った証明です。
そこで、もしも光がエネルギーだったらどうでしょうか。
アインシュタインの有名な式E = mc2をつかえば、
エネルギーと質量の変換ができます。
光をエネルギーとすれば、質量と同じとみなすことができます。
「動的エネルギー」だけならば、まっすぐ進みますが、
「静的エネルギー」が注入されれば、軌道が変わります。
それが、「重力レンズ」のような働きをしているのではないかと予想します。
質量の大きい天体の「静的エネルギー」は光の軌道を曲げる大きいので、
光が双曲線軌道を描いて、質量の大きな天体を横切ります。
双曲線軌道は、このブログを参照ください。
これは、予想に過ぎませんが、
これが正しければ、「一般相対性理論」の牙城が崩れます。
「重力レンズ」の記事
これらの理由で、「一般相対性理論」ちょっと待てよ!
と思うのでした。
会議に行かなければんらないので、この辺で!!