
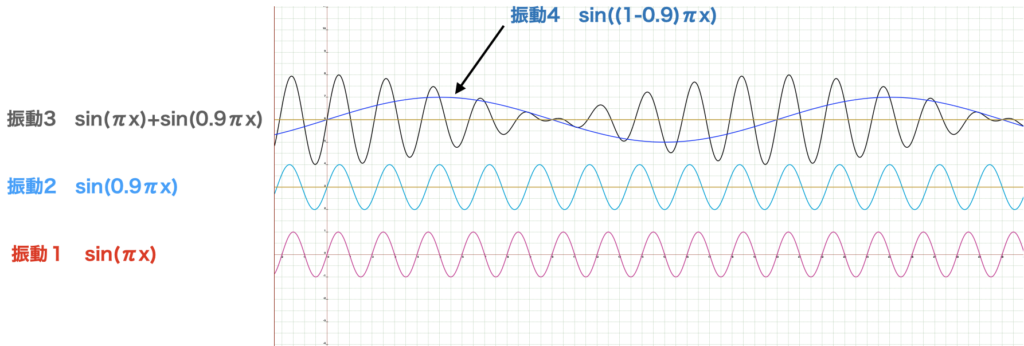
うなりについて
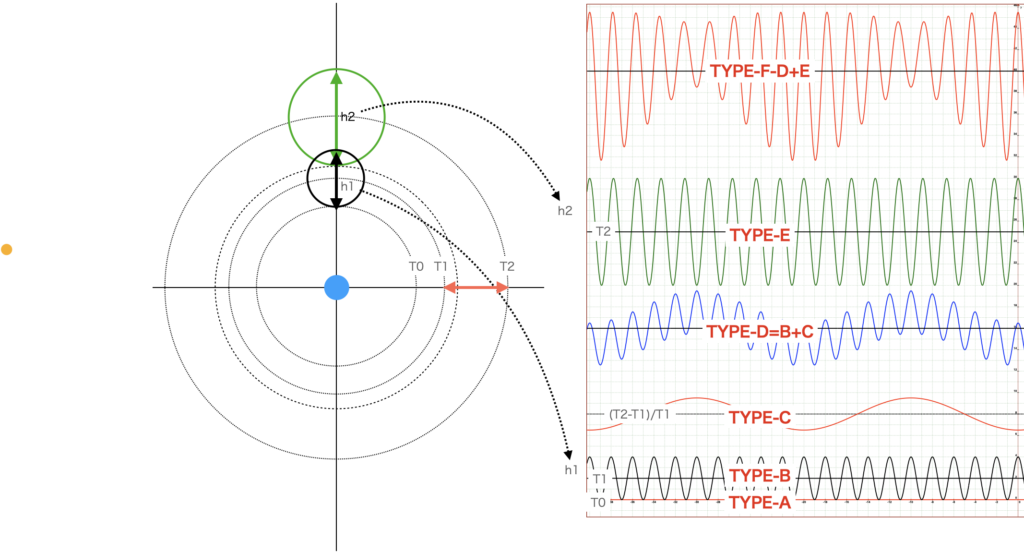
2つの振動がわずかな周期の差によって、うなりが発生する。
下の図は、1/10の周期の差によって起きた振動です。
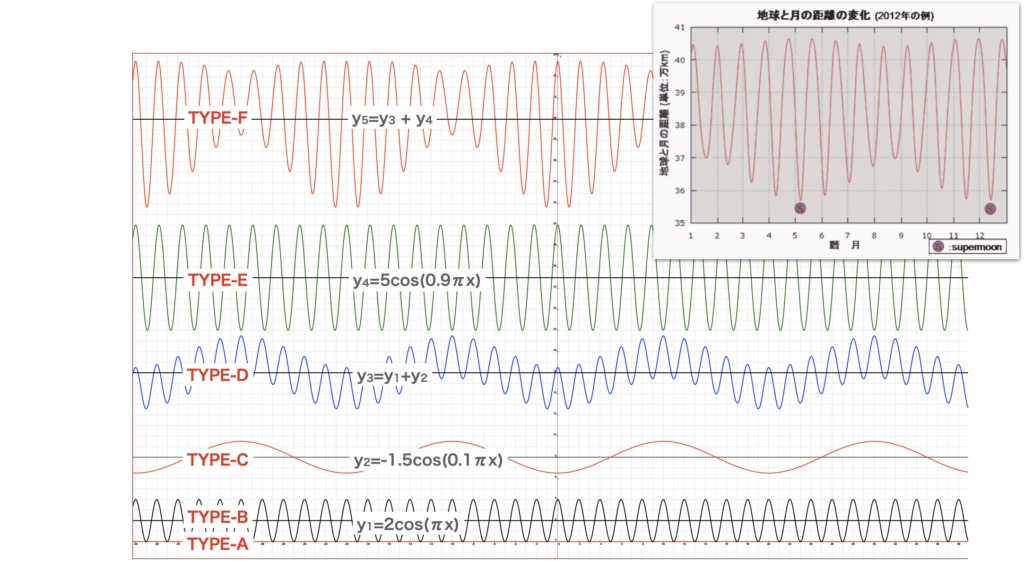
公転周期の変化
地心距離の周期
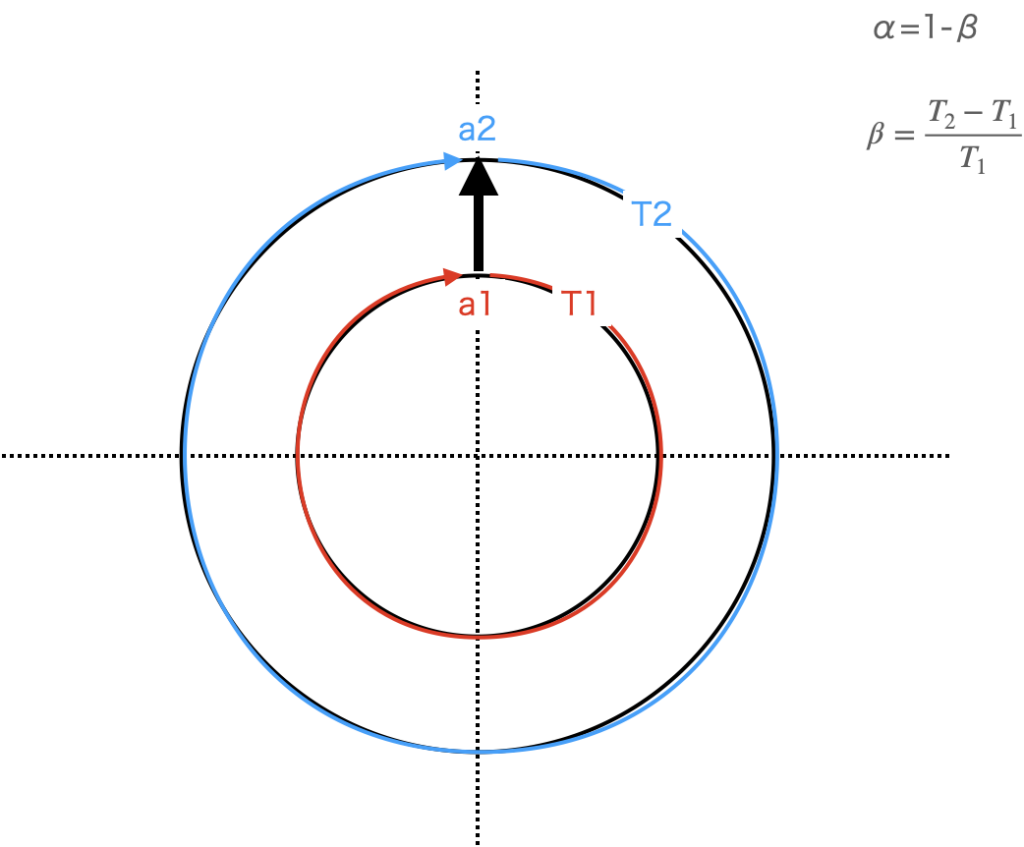
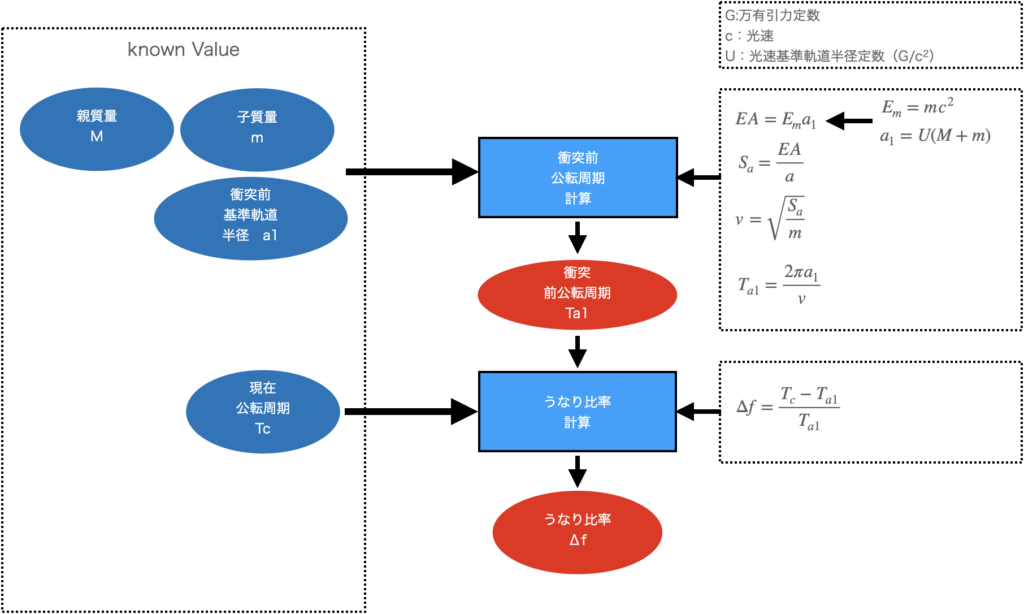
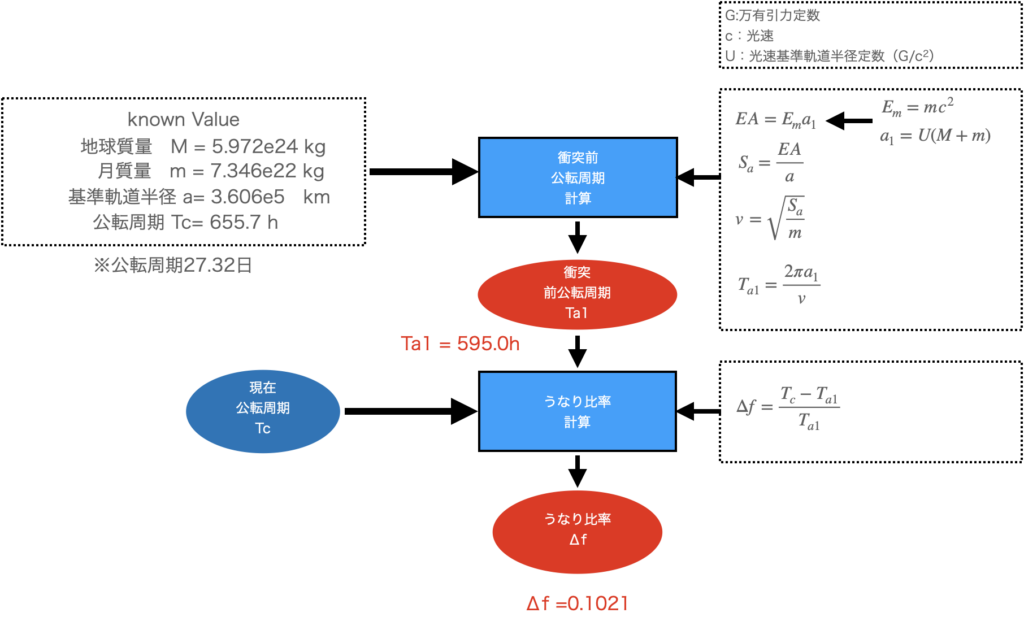
うなり比率の計算
【例】
第2衝突によるうなり
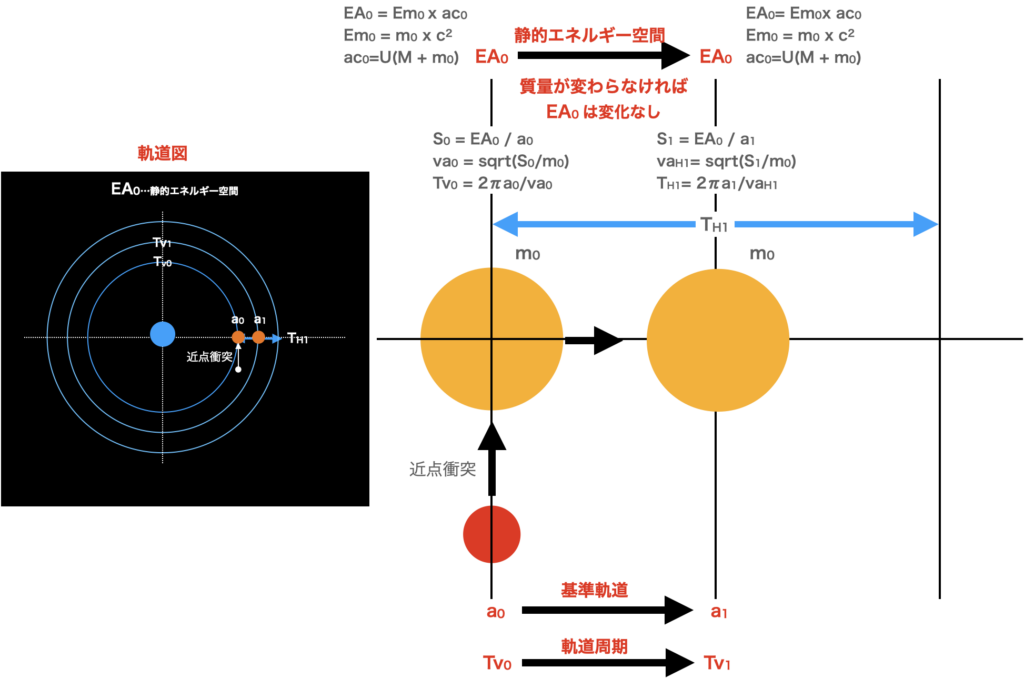
軌道周期と公転周期(質量変化なし)
軌道周期と公転周期(質量変化あり)

うなりについて
2つの振動がわずかな周期の差によって、うなりが発生する。
下の図は、1/10の周期の差によって起きた振動です。
公転周期の変化
地心距離の周期
うなり比率の計算
【例】
第2衝突によるうなり
軌道周期と公転周期(質量変化なし)
軌道周期と公転周期(質量変化あり)
(ナレ)ここは、田舎の研究所。
動物好きの女性所長と、頼りになる研究員で宇宙の研究をしている。
そんな中、ある日
保護猫のチャーがあらわれる。びしょ濡れで研究所に顔をだした。
それから、ずっと研究所に居ついた。そして、チュールがお気に入り。
というか、チュールしか食べない。
チャーは、研究所に来る前は、
猫軍団といっしょにあそんでいた。
チャーが研究所に来てから、1年程たった夏の日、
研究所がある町に、
猫嫌いなおじさんが居て、
猫狩りを始めた。
それで、
猫軍団は、あわてて、研究所に逃げてきたのだ。
今や猫軍団は、研究所に住み着いている。
研究所は、
宇宙の研究をしているが、
あまり良い成果があがらない。
論文も駄作続出。
さてさて、研究員は、
スクラップ アンド ビルト だ!!
と意気込んでいる。
はたして、何かいいアイデアや理論が生まれるのか!
(エンディ)まあ、ここで私は一言言いたい!
「もっと宇宙の構造は簡単ではないかと。」
「宇宙の動きは、簡単な数学で動いているに違いない。」
でなければ、宇宙自体が、
超スーパーコンピューターみたいな頭脳を持っていなければ、
この宇宙を保つのはむずかしいです。
(研究員)3体問題すら解けない宇宙って変じゃないですかね!!
3つの天体の動きが、計算できないって。
そりゃ根本の考え方が違っているんじゃないかと思うんですよ。
宇宙は、3体問題は発生しないということでです。(言い切った!)
2つの場合は明確にわかるんだから、
すべては2体問題で解決できるんじゃないかと思うんですよ。
(エンディ)
太陽、地球、月といった関係は、
太陽と地球、地球と月って感じの2体問題なら
宇宙全体が全体がスッキリ!します。
(研究員)太陽が月に関与してくると3対問題になって、動きがややこしくなるんだよな。
でも、ニュートンは万有引力っていってるし、
2対問題だけで、すべて説明するのは難しいんじゃないか。
(エンディ)まあそうだけどね
(研究員)太陽は動いているのに、
太陽が止まっているとみなしても
地球は太陽の周りをうまく回ります。
月は、地球の周りを回っていますが、
太陽の周りも地球といっしょに回っています。
しかし。月から見た地球は、止まっているとみなしても、
うまく説明がつきます。問題ありません。
(エンディ)そうだね、慣性の法則ににています。
太陽のトラックの荷台に、惑星が乗っていて、
惑星のトラックの荷台に、衛星が乗っている、
ようなイメージです。
(研究員)うちのカメたちも同じです。
ニュートンの「重力理論」は、
全ての天体は、関連しあって動いている。
つまり、ネットワーク構造です。
ネットワーク構造の場合、宇宙は複雑な動きをするはずです。
しかし、
太陽系の惑星、衛星の動きは、
宇宙は秩序を持って動いています。
言い過ぎかもしれませんが。そのように見えます。
それでは、そのあたりから研究をはじめてみますか。
そうしましょう
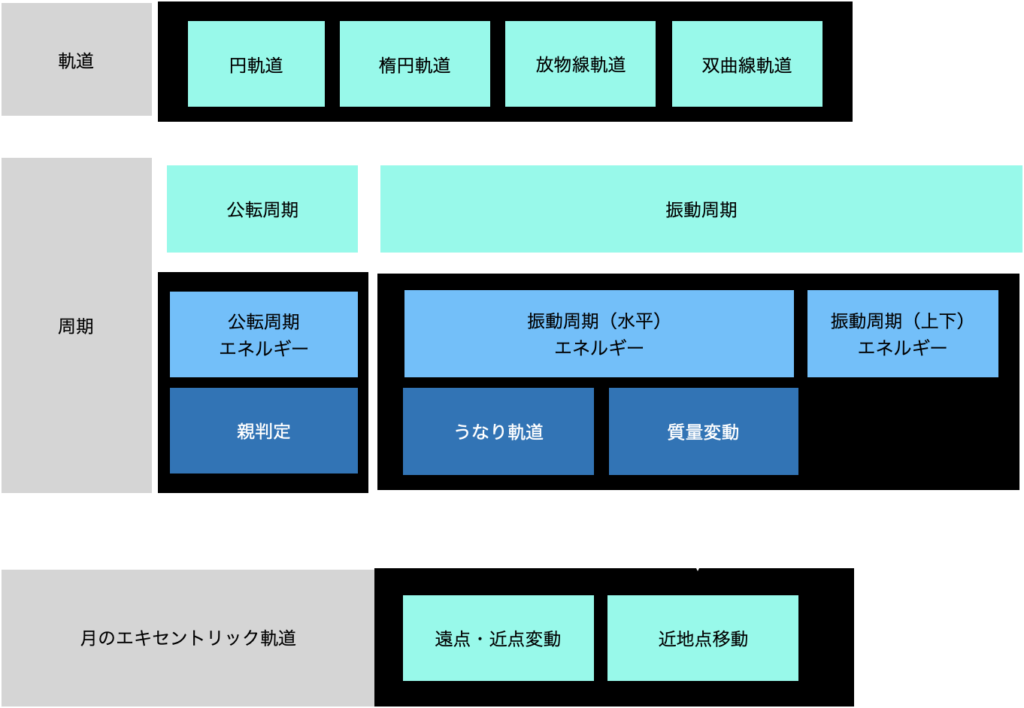
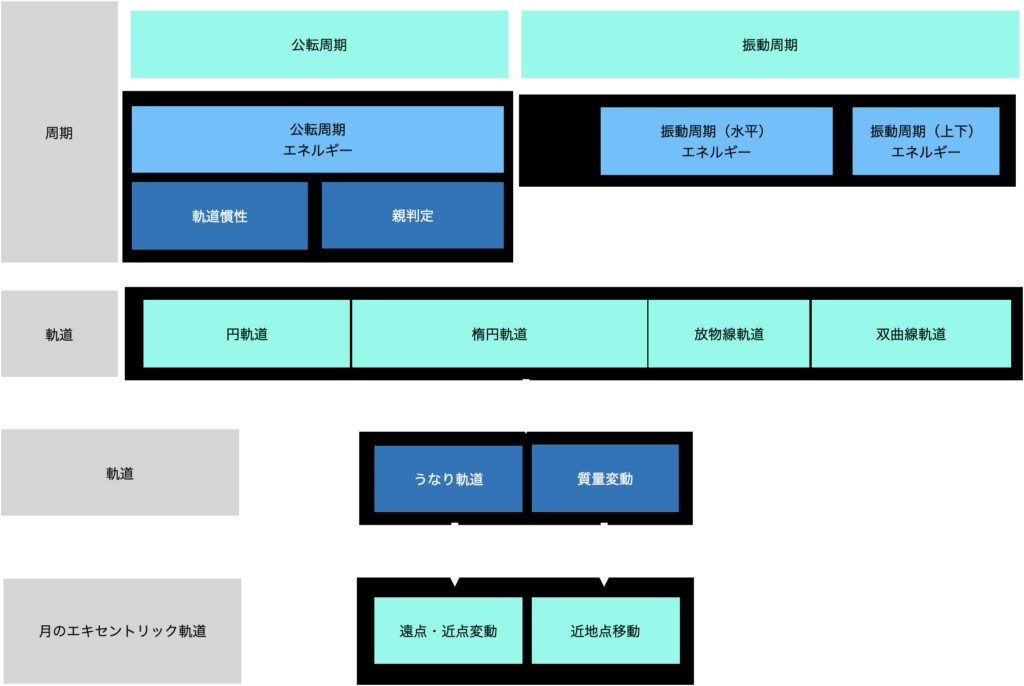
軌道種類は、
円軌道
楕円軌道
放物線軌道
双曲線軌道1
の4種類あります。
これらは、
公転周期と振動周期の2種類の周期があります。
というか、2種類の周期で軌道が決まります。
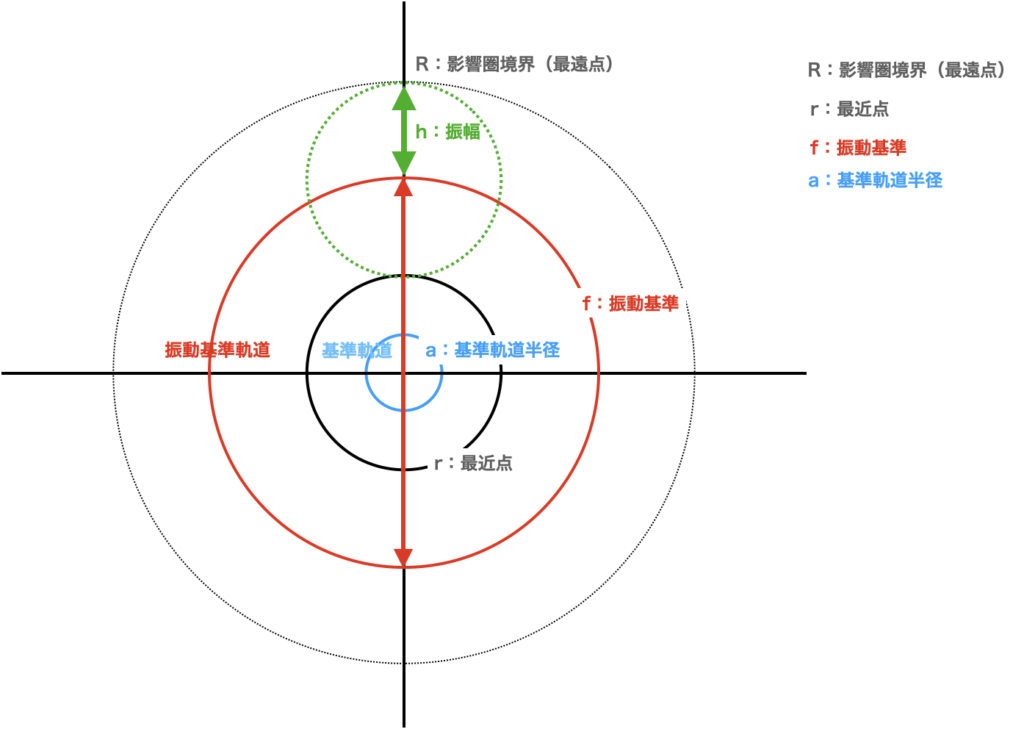
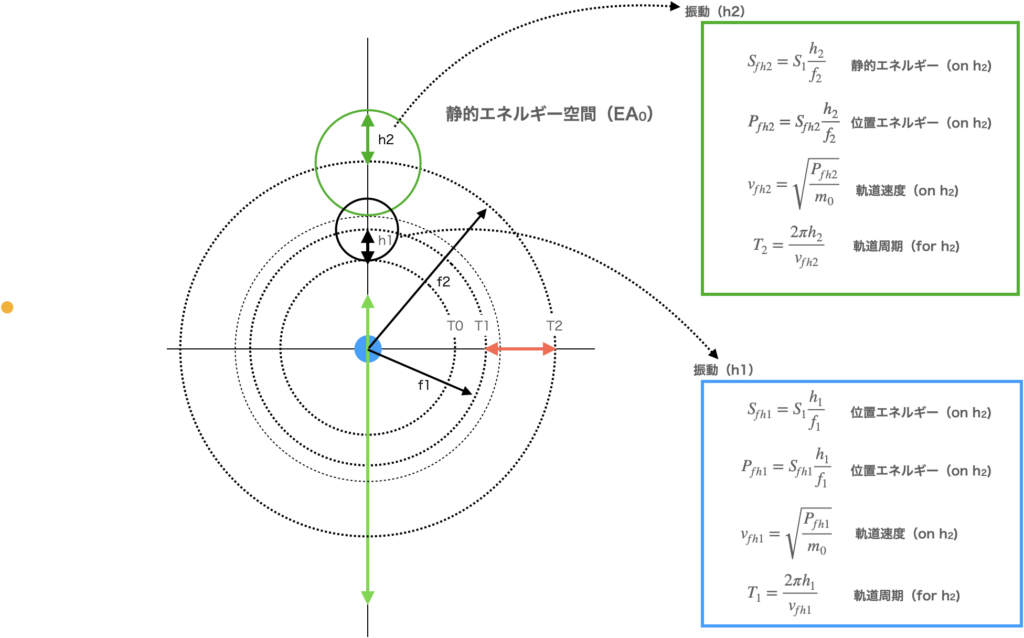
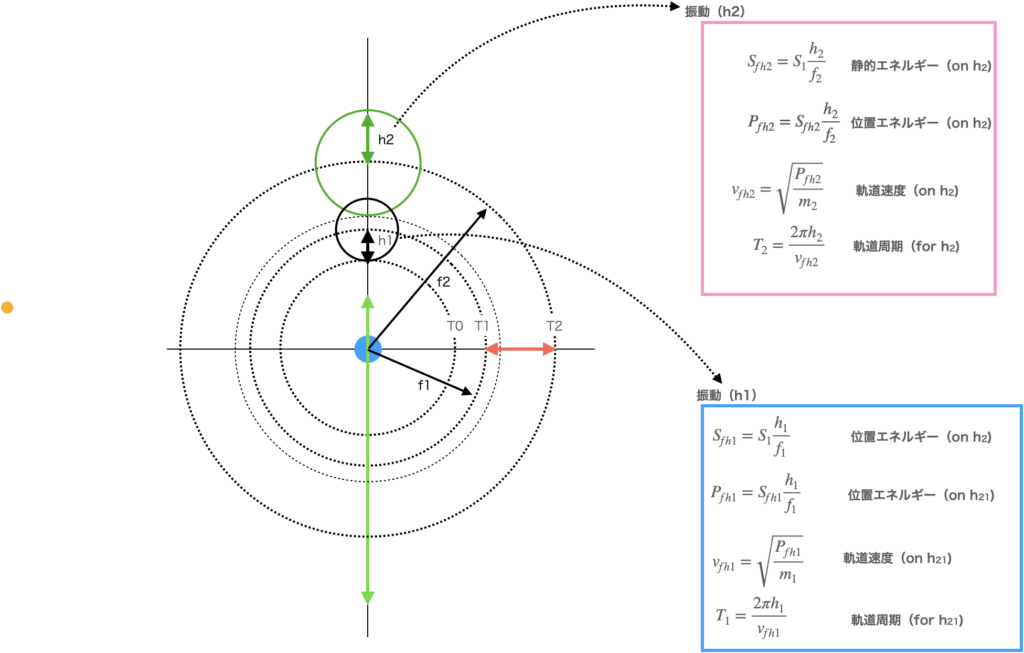
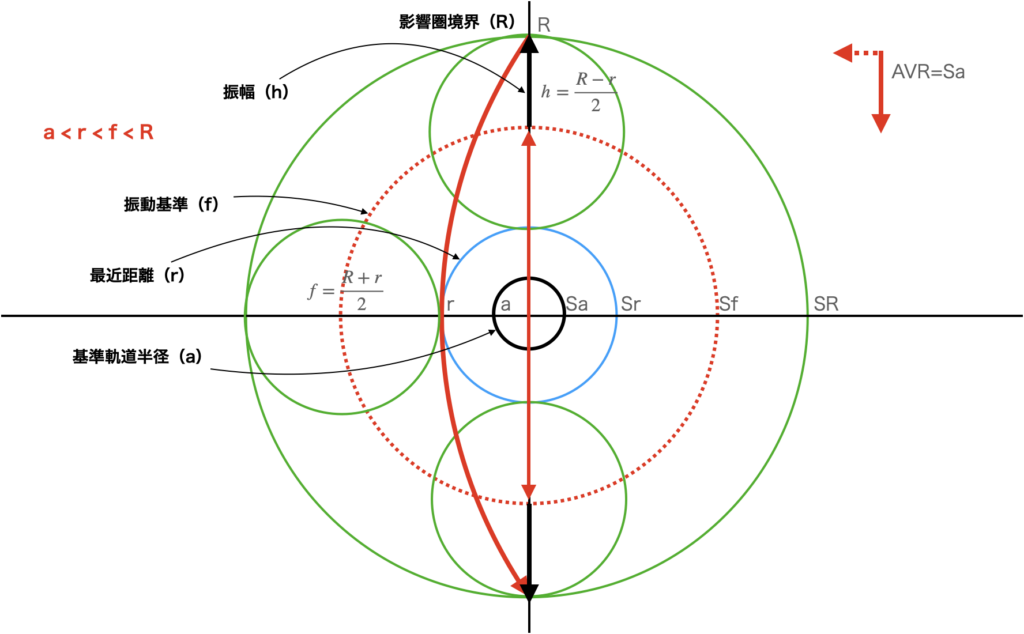
| 距離名 | 中心からの距離 | 静的エネルギー(S=EA/x) | 位置エネルギー | 軌道速度(sqrt(S/m)) | 軌道周期 |
| 基準軌道半径 | a | Sa | va | Ta=2πa/va | |
| 最近点 | r | Sr | vr | Tr=2πr/vr | |
| 振動基準 | f = ( R + r ) / 2 | Sf | Pfh=Sf(h/f) | vf | Tf=2πf/vf |
| 振幅 | h = ( R – r ) / 2 | Ph=Pfh(h/f) | vh | Th=2πh/vh | |
| 影響圏境界最遠点 | R | SR | vR | TR=2πR/vR |
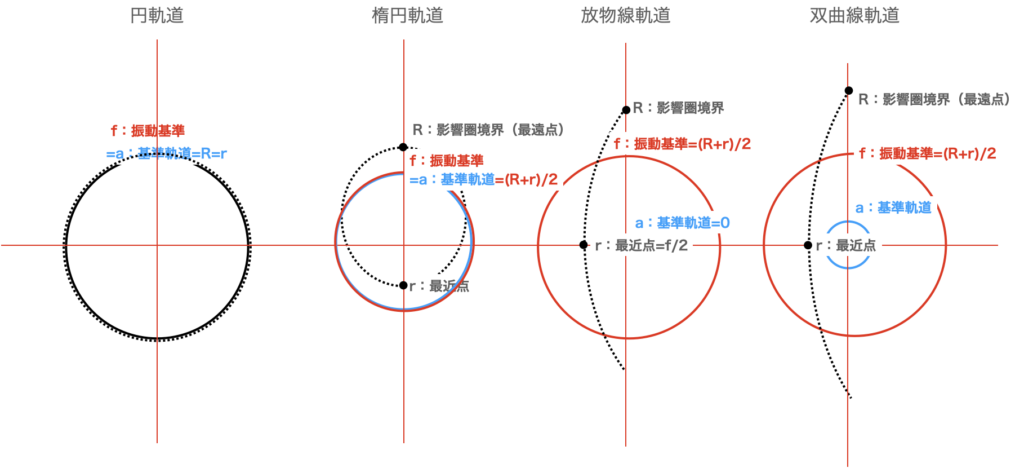
| 距離名 | 近点 | 遠点 | |||
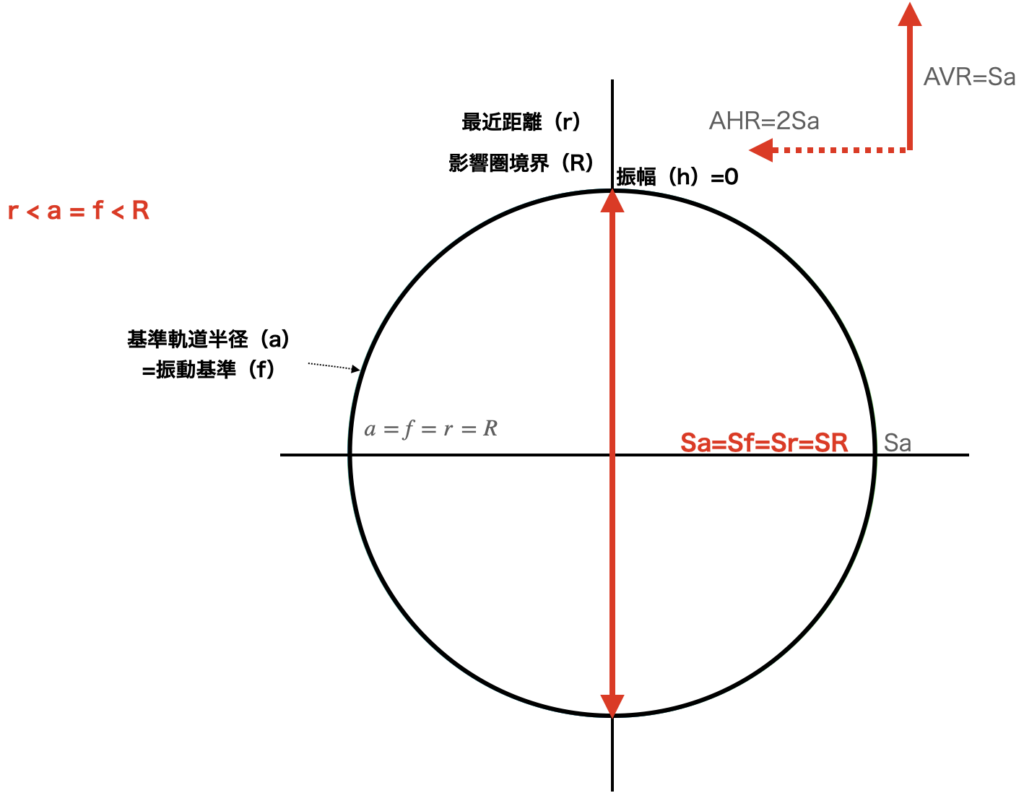
| 円軌道 | 最近距離(r)=基準軌道半径(a)=振動基準(f)=影響圏境界(R) | 振幅(h)=0 | |||
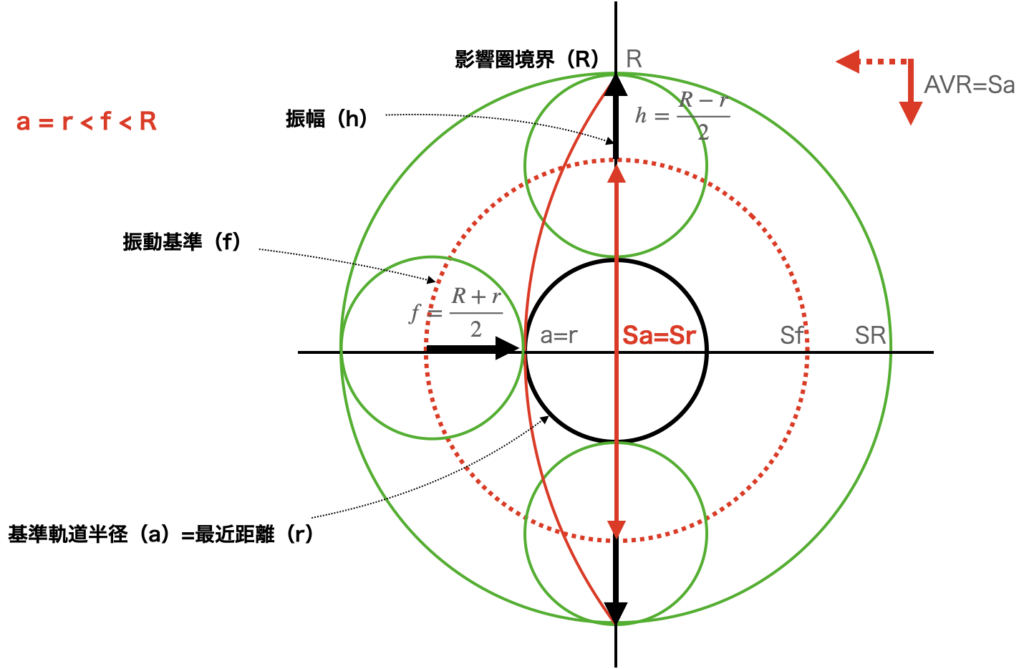
| 楕円軌道 | 最近距離(r) | 基準軌道半径(a)=振動基準(f) | 振幅(h) | 影響圏境界(R) | |
| 放物線軌道 | 基準軌道半径(a)=最近距離(r) | 振動基準(f) | 振幅(h) | 影響圏境界(R) | |
| 双曲線軌道 | 基準軌道半径(a) | 最近距離(r) | 振動基準(f) | 焦点軌9道半径(h) | 影響圏境界(R) |
円軌道
楕円軌道

放物線軌道
双曲線軌道
公転周期と振動周期による軌道はこのようになります。
双曲線軌道の最近点が、影響圏への侵入速度と入射角で計算できないかと、
考えていた分けですが、ちょっとわかったかもしれません。
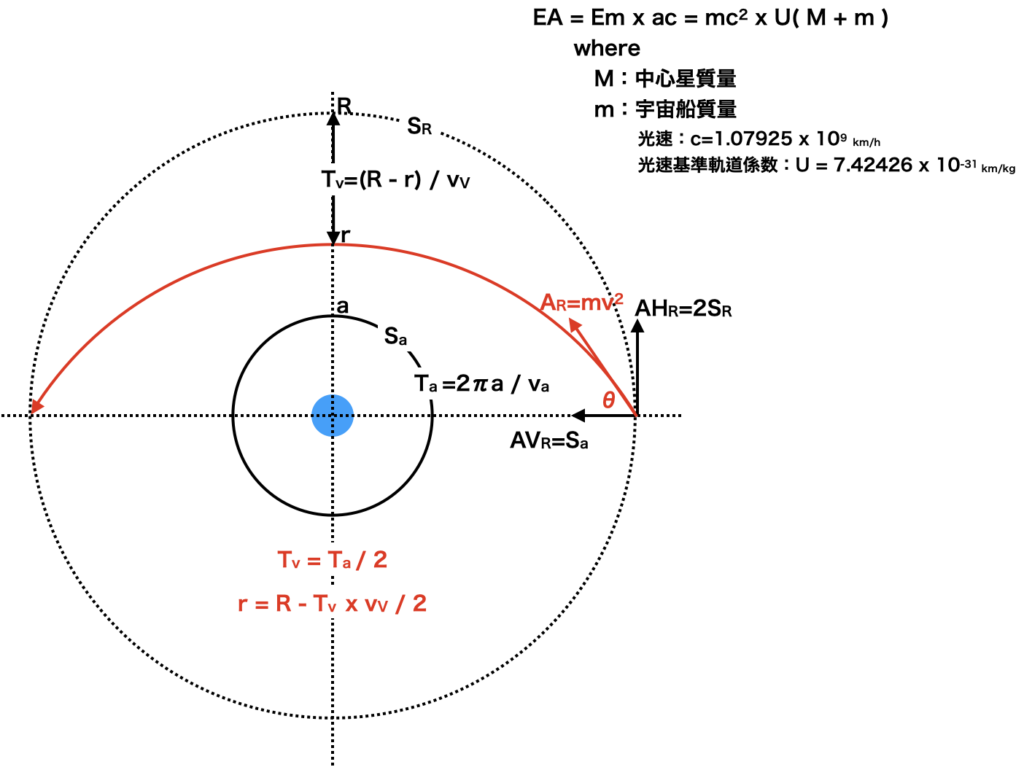
進入動的エネルギー AR(m kg x vR2 km/h)
進入角度θ deg
が既知の場合
■水平方向の動的エネルギーAHR = AR sin2θ kg(km/h)2
■垂直方向の動的エネルギーAVR = AR cos2θ kg(km/h)2
になります。
■基準軌道 静的エネルギー(Sa )
基準軌道半径aの静的エネルギーSaと同じ
Sa = AVR kg(km/h)2
になります。
■基準軌道半径(a)
宇宙船の質量をm
中心星の質量をM
質量エネルギーと光速基準軌道半径の積を
EA = Em x ac ( ==> mc2 x U( M + m )) kg(km/h)2km
: c=1.07925 x 109 km/h 、U = 7.42426 x 10-31 km/kg
とすると
基準軌道半径は、a = EA / AVR になります。
■基準軌道の公転周期(Ta)
位置aの軌道速度(va)は、va = sqrt(Sa/m) km/h
なので
Ta = 2πa / va h
になります。
■影響圏境界の静的エネルギー(SR)
位置Rで影響圏(S2静的エネルギー曲線)に侵入するので、
SR = AHR / 2 となります。
■影響圏侵入距離(R)
R = 2EA / AHRになります。
■垂直方向の平均速度(vV)
垂直方向の運動エネルギー(K)は、2SRなので、
vV = sqrt(2SR/m) / 2 になります。
■振動周期(Tv)
宇宙船は、影響圏侵入距離(R)から最近点(r)に到達して、
また影響圏侵入距離(R)に戻るので、
LV =(R – r)x 2 km(①式) 垂直方向に移動するので、
TV = LV / vV h(②式)
になります。
■最近点(r)
ここで、振動周期Tvは、
位置aの公転周期の半分 ( Ta /2) になるので、
①式と②式より
LV =(R – r)x 2 = Tv x vV
式を変形して
r = R – Tv x vV / 2
で算出できます。
具体例 木星の双曲線軌道
【設定値】
■中心星質量 M = 1.89813e27 kg
■宇宙船 m = 1.0e3 kg
■影響圏侵入動的エネルギー AR = 5.184e12kg(km/h)2
■影響圏進入角度 θ = 52度
【計算結果】
■水平方向の動的エネルギーAHR = ARsin2θ = 1.96494e12 kge(km/h)2
■垂直方向の動的エネルギーAVR = ARcos2θ = 3.21906e12 kg(km/h)2
■基準軌道の静的エネルギー Sa = AVR = 3.21906e12 kg(km/h)2
■基準軌道半径 a = 509,913 km
■基準軌道の公転周期 Ta = 56.470 h
■影響圏境界の静的エネルギー SR = AHR / 2 = 9.82470e11 kg(km/h)2
■影響圏境界の距離 R = 1,670,731 km
■垂直方向の平均速度 vV = 22,163.8 km/h
■振動周期 Tv = 28.235 h
■最近点 r = 1,357,838 km
近点移動は、衝突により、天体の質量が変化したために発生します。
多分、この理論は、まだ誰も考えていないはずです。
(静的エネルギー、動的エネルギー)で近点移動を考えていないからです。
とりあえず、
土星と月の2度の衝突について、プログラミングしてみた。
コメントがまだ全部に入れてないけれど、
だいたいの雰囲気は伝わるはずです。
プログラム(python)
import numpy as nm
#=============================================#
# CLASS : uniVerse
# 宇宙クラス
#=============================================#
class uNiverse:
c = 1.0792528488E+9 #光速(km/h)
U = 7.4242576375E-31 #質量・光速時基準軌道 変換定数 (km/kg)
CsS=1296000 #円周の秒数(秒)
CyT=8760 #年間時間(時間)
def Sa(self,M,m,a):
EA = self.EA(M,m)
Sa = EA/a
return Sa
def EA(self,M,m):
EA = self.Em(m) * self.ac(M,m)
return EA
def Em(self,m):
Em = m * self.c**2
return Em
def ac(self,M,m):
ac = self.U * (M + m)
return ac
def va(self,Sa,m):
va = nm.sqrt(Sa/m)
return va
#=============================================#
# CLASS : pLanet
# 惑星クラス
#=============================================#
class pLanet:
def A(self,m,v):
self.A = m * v**2
return self.A
def prt(self):
print(f”NAME ={self.name:10S}”)
print(f”mass ={self.m:.5e}”)
print(f”VELOCITY={self.v:.5e}”)
print(f”D.ENERGY={self.A:.5e}”)
#=============================================#
# CLASS : pLmove
# 惑星移動クラス
#=============================================#
class pLmove(uNiverse,pLanet):
def ax(self,Sa,EA,Ax):
self.a = EA/(Sa – Ax)
return self.a
def SRP(self,a,v):
self.SRP = 2 * nm.pi * a / v
return self.SRP
#=============================================#
# CLASS : iMpact
# 衝突クラス
#=============================================#
class iMpact(pLmove):
#
# pMove:衝突後の変化した分の質量
# <PRM> m:衝突前の天体の質量(kg)
# a:基準軌道半径(km)
# v:速度(km/h)
# margin:年間近点移動角度(秒)
# <RTN>
# SRP:公転周期(Sidereal Rotation Period)#self
# Ny:1年の公転回数 #self
# deG:1公転での近点移動角度 #self
# ΔT:1公転での近点移動時間(h) #self
# Tf:1公転での近点移動を含めた時間(h) #self
# mf:衝突後の天体質量(kg) #self
# Δm:衝突によって変化した分の質量(kg) #self+RTN
def iMpact(self,m,a,v,margin):
SRP = self.SRP(a,v)
Ny = self.Ny(SRP)
deg = self.deG(margin,Ny)
ΔT = self.ΔT(deg,SRP)
Tf = self.Tf(SRP,ΔT)
mf = self.mf(m,Tf,SRP)
Δm = self.Δm(mf,m)
return Δm,Tf
#
# Ny:1年の公転回数
# <PRM> SRP:公転周期 時間(h)
# <RTN> Ny:1年の公転回数
def Ny(self,SRP):
Ny=self.CyT / SRP
return Ny
#
# deG:1公転での近点移動角度
# <PRM> margin:近点移動年間移動角度(秒)
# <RTN> deG:1公転での近点移動角度(秒)
def deG(self,margin,Ny):
deG=margin/Ny
return deG
#
# ΔT:1公転での近点移動時間(h)
# <PRM> deG:1公転での近点移動角度(秒)
# <RTN> ΔT:1公転での近点移動時間(h)
def ΔT(self,deg,SRP):
ΔT = deg / self.CsS * SRP
return ΔT
#
# Tf:1公転での近点移動を含めた時間(h)
# <PRM> SRP:公転周期 時間(h)
# <RTN> Tf:1公転での近点移動を含めた時間(h)
def Tf(self,SRP,ΔT):
Tf = SRP+ΔT
return Tf
#
# mf:衝突後の天体質量(kg)
# <PRM> m :衝突前の天体の質量(kg)
# Tf:1公転での近点移動を含めた時間(h)
# SRP:公転周期 時間(h)
# <RTN> mf:衝突後の天体質量(kg)
def mf(self,m,Tf,SRP):
mf=m*(Tf/SRP)**2
return mf
#
# Δm:衝突によって変化した分の質量(kg)
# <PRM> m :衝突前の天体の質量(kg)
# mf:衝突後の天体質量(kg)
# <RTN> Δm:衝突によって変化した分の質量(kg)
def Δm(self,mf,m):
Δm = mf – m
return Δm
#
# iE:衝突エネルギー(je=kg*(km/h)2)
# <PRM> Sai:衝突前基準軌道の静的エネルギー(je)
# Sa :衝突後基準軌道の静的エネルギー(je)
# <RTN> iE:衝突エネルギー(je)
def iE(self,Sai,Sa):
return Sai-Sa
#
# iA:衝突位置の動的エネルギー(je=kg*(km/h)2)
# <PRM> Sai:衝突前基準軌道の静的エネルギー(je)
# iE :衝突後基準軌道の静的エネルギー(je)
# <RTN> iA:衝突エネルギー(je)
def iA(self,Sai,iE):
return Sai+iE
class SUN(pLmove):
def __init__(self):
self.name=”SUN”
self.m=1.9891e30
class EARTH(pLmove):
def __init__(self):
self.name=”EARTH”
self.m = 5.97219e24
self.a = 147077401
self.ρ = 5.51e12 #密度
self.margin = 11.45 #秒
class MOON(pLmove):
def __init__(self):
self.name=”EARTH-MOON”
self.m = 7.347673e22
self.a = 356400
self.ρ = 3.344 #密度
self.margin = 360*3600/8.85 #秒
# self.margin = 0
class SATURN(pLmove):
def __init__(self):
self.name=”SATURN”
self.m = 5.68319e26
self.a = 1349823615
self.ρ = 0.687e12 #密度
self.margin = 162.9 #秒
#
# FUNCTION
#
def prBase():
print(f”<===== {pln.name:10s} IMFORMATION =====>”)
print(” “)
print(f”Mass ={pln.m:.5e}kg”)
print(f”a ={pln.a:.5e}km”)
print(f”ρ ={pln.ρ:.5e}kg/km3″)
print(f”margin ={pln.margin:.5e}秒”)
print(” “)
return
def prImpact():
return
def clImpact():
m = pln.m
a = pln.a
margin = pln.margin
Sa = pln.Sa(M,m,a)
va = pln.va(Sa,m)
v = va
ai = pln.ax(Sa,pln.EA(M,m),Ai)
Sai = pln.Sa(M,m,ai)
vi = pln.va(Sai,m)
SRP = pln.SRP(ai,vi)
(Δm,Tf) = imp.iMpact(m,ai,vi,margin)
iE = imp.iE(Sa,Sai)
print(“< IMPACT IMFORMATION >”)
print(” “)
print(f”Sa = {Sa:.5e}je”)
print(f”Ai = {Ai:.5e}je”)
print(f”ai = {ai:.5e}km”)
print(f”vi = {vi:.5e}km/h”)
print(f”SRP= {SRP/(365*24):.5e}year ({SRP:.5e}hour)”)
print(f”Tf = {Tf:.5e}hour”)
print(f”Δm = {Δm:.5e}kg”)
print(f”mx = {m+Δm:.5e}kg”)
print(f”iE = {iE:.5e}je”)
print(” “)
return
#
# MAIN ROUTINE
#
#
#—– SUN —–
#
sun = SUN()
M = sun.m
#
#—– SATURN —–
#
imp = iMpact()
pln = SATURN()
prBase()
Ai = 3.9018993407E+34
clImpact()
#
#—– EARTH – MOON 1 —–
#
ert = EARTH()
M = ert.m
imp = iMpact()
pln = MOON()
pln.a = 356400
prBase()
Ai = 1.2553914256E+28
clImpact()
#
#—– EARTH – MOON 2 —–
#
ert = EARTH()
M = ert.m
imp = iMpact()
pln = MOON()
pln.a = 363400
pln.margin = 0
prBase()
Ai = 5.7748974729E+28
clImpact()
【実行結果】
<===== SATURN IMFORMATION =====>
Mass =5.68319e+26kg
a =1.34982e+09km
ρ =6.87000e+11kg/km3
margin =1.62900e+02秒
< IMPACT IMFORMATION >
Sa = 7.24428e+35je
Ai = 3.90190e+34je
ai = 1.42667e+09km
vi = 3.47279e+04km/h
SRP= 2.94659e+01year (2.58121e+05hour)
Tf = 2.59077e+05hour
Δm = 4.21756e+24kg
mx = 5.72537e+26kg
iE = 3.90190e+34je
<===== EARTH-MOON IMFORMATION =====>
Mass =7.34767e+22kg
a =3.56400e+05km
ρ =3.34400e+00kg/km3
margin =1.46441e+05秒
< IMPACT IMFORMATION >
Sa = 1.07784e+30je
Ai = 1.25539e+28je
ai = 3.60600e+05km
vi = 3.80767e+03km/h
SRP= 6.79270e-02year (5.95041e+02hour)
Tf = 5.99608e+02hour
Δm = 1.13225e+21kg
mx = 7.46090e+22kg
iE = 1.25539e+28je
土星の場合
Δm = 4.21756e+24kg 質量が増えて
近点移動 1.62900e+02秒 がおこります。
月の1回目の衝突の場合
Δm = 1.13225e+21kg 質量が増えて
近点移動 1.46441e+05秒 がおこります。
が計算結果からわかります。
月の2回目の衝突の場合は、みなさんで計算してみてください。
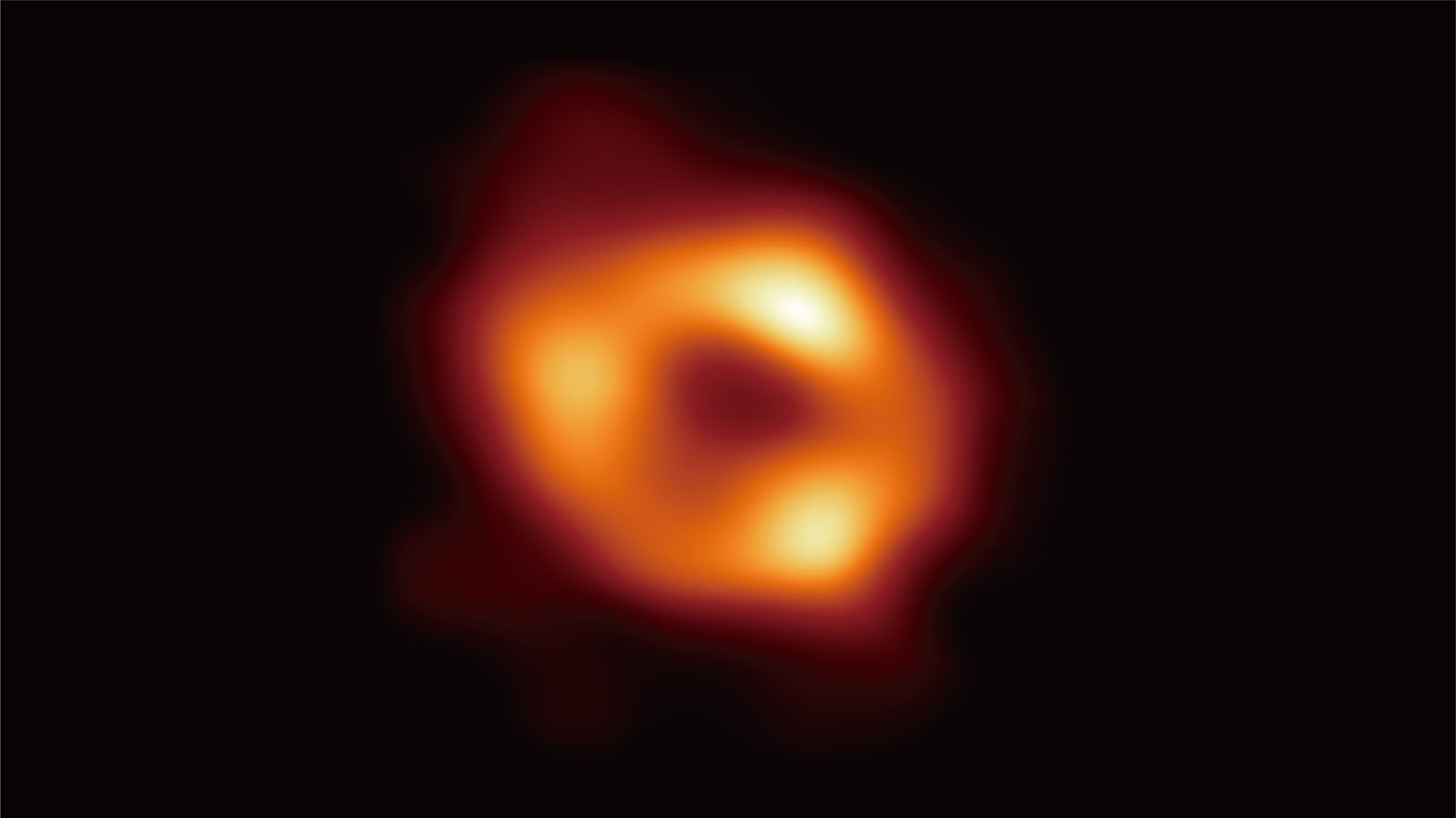
ブラックホールは最近、国際研究チーム「イベント・ホライズン・テレスコープ(EHT)・コラボレーション」は、地球規模の電波望遠鏡ネットワークを使って、私たちが住む天の川銀河の中心にある巨大ブラックホールの撮影に初めて成功しました。
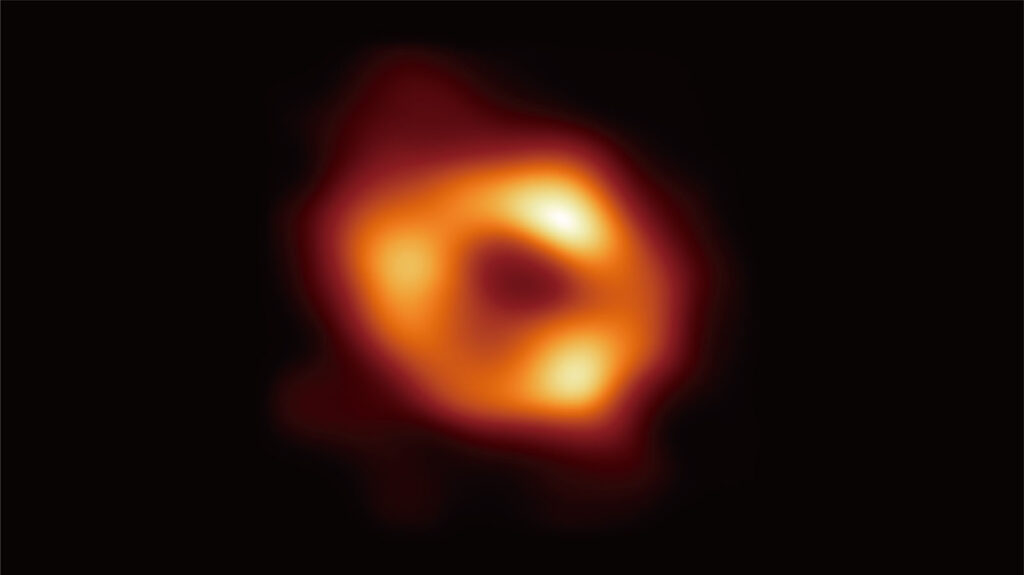
この画像は、EHTによる仮想望遠鏡(地球上の8つの電波望遠鏡を繋げて)で撮影したとのこと)
なんとも、すごい時代ですが!
画像が至るところにあるので、検索してみてください。
ところで、ブラックホールに落ちたらもうでられない!蟻地獄的な巷の噂が流れております。
そこで、その現象が正しいのか、検証してみます。
エンディラボ的解釈
考えるにあたって、
(1)中心性と光の静的エネルギーと動的エネルギーについて検討してみます。
こんな図を作ってみました。
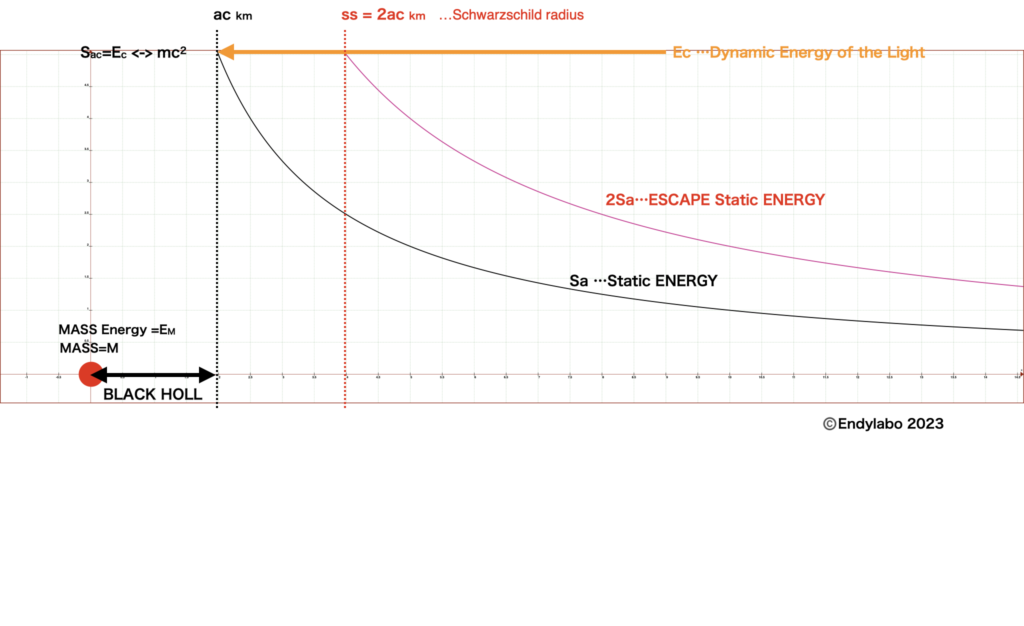
光の動的エネルギー(Ec)は不変なので、
下図の黄色い線のエネルギーを持っています。
①シュワルツシルツ半径の中(2Sa…Escape Static Energy)の外にある場合
中心星の影響は受けません
②光が、シュワルツシルツ半径の中(2Sa…Escape Static Energy)から 光基準軌道半径(ac)にある場合
中心星の影響圏になります
③光基準軌道半径(ac)の内側にある場合
光は入れません。
光基準軌道半径(ac)で、
静的エネルギーと動的エネルギーがバランスしているので、
その中では、バランスしなくなるので
光は光基準軌道半径(ac)のなかには入りません。(入れません?)
結果
acとss(シュワルツシルツ半径)の間で光は動くことになります。
その中を「ブラックホールリング」と呼ぶことにすると
光は、ブラックホールの周りを、リング状に見えることになります。
そして、ブラックホールに光が吸い込まれるのではなく、
入れてもらえないということになります。
ブラックホールと静的エネルギー、動的エネルギーは、下の図のような関係になります。
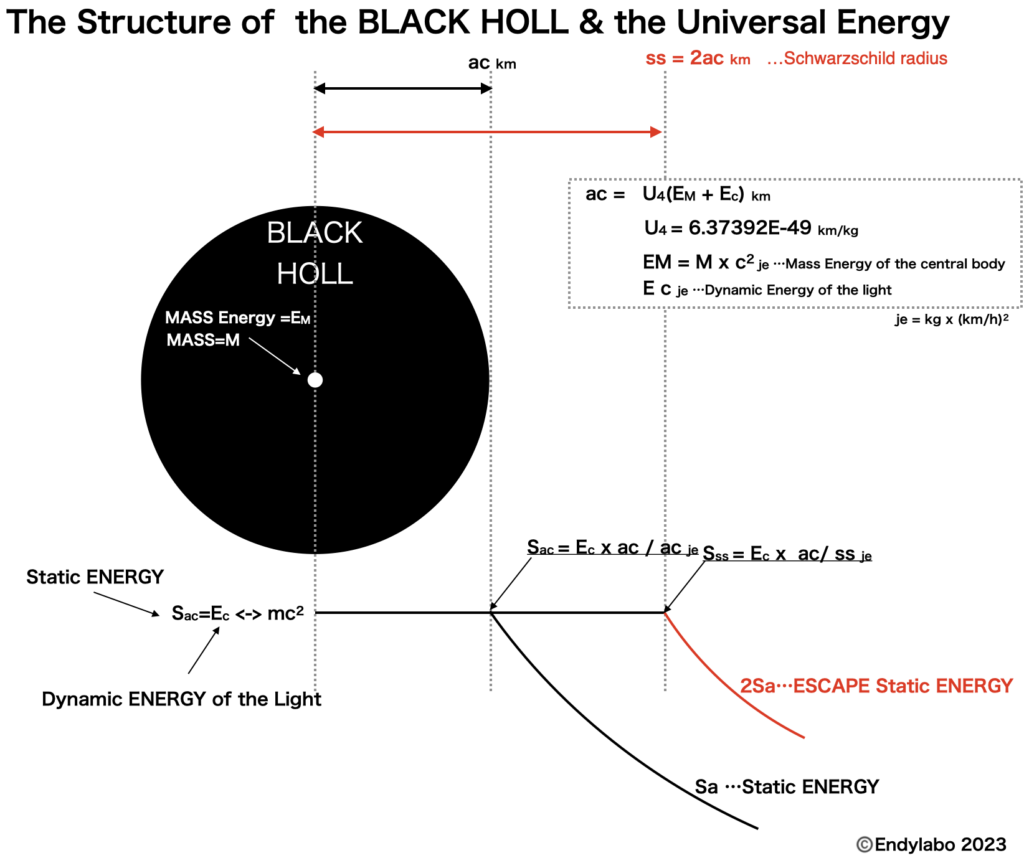
黒い丸がブラックホールです。
半径は基準軌道半径(ac)になります
シュワルツシルツ半径(ss)とacの間がブラックホールリングになります。
下の線が、静的エネルギー曲線とエスケープ静的エネルギー曲線になります。
いままで、ニュートンやケプラーの法則から、『宇宙エネルギー構造』の理論を説明してきました。
おそらく、その方がわかりやすいのではないか。
また、現在ある理論を使った方が、間違った方向にいかないのでは無いか、
と思いそのように説明してきました。
しかし、
インパクトが少なくて、読む人(目に止まる人)が少ないというのが現状です。
兎角この様な話は、専門家にしか興味がないというのが、セオリーです。
というか、あまり広報していないのが原因のひとつですが。
なにはともあれ、
このサイトの意図としては、宇宙は力でバランスしているのではなくて、エネルギーでバランスしています!
ということをいいたいわけです。
どこが違うかというと、天体の軌道を力の作用反作用のバランスで考えるのか、または天体自身が保持しているエネルギーがバランスする方向に動くかということです。
力はそもそもその力はどうして働いているのか?ロープで繋がっているわけでは無いわけなのでもないのに。
という疑問が発生します。
エネルギーで考えると、天体自身が2つのエネルギーを持っていて、そのエネルギーと宇宙が与えてくれたエネルギーでバランスするところに天体が居座る、もしくは移動すると考えれば、見えないロープ?は必要無くなるわけです。
確かに、アインシュタインの様に、宇宙空間が天体の質量で歪んでいるっていう考えもあるかもしれませんが、それはそれで、重力レンズなので照明されているので、あえて否定はしませんが、重力レンズの効果が宇宙空間の歪み以外で起こるとすれば、それも疑わしいことになります。今のところ、アインシュタインの一般相対性理論以外では証明されていませんが。(ブログ「光もスイングバイ」を参照してみてください)
そこで、独自に理論を打ち立て、宇宙構造を解体したいと思います。
それが「宇宙エネルギー構造理論」です。
コンテンツは、こんな感じです。
結論から言うと
タイトル『重力は無いですよ!』
です。
それでは、ニュートンの「プリンキピア」風に仮定と定義を記述します。
—————————————————————————–
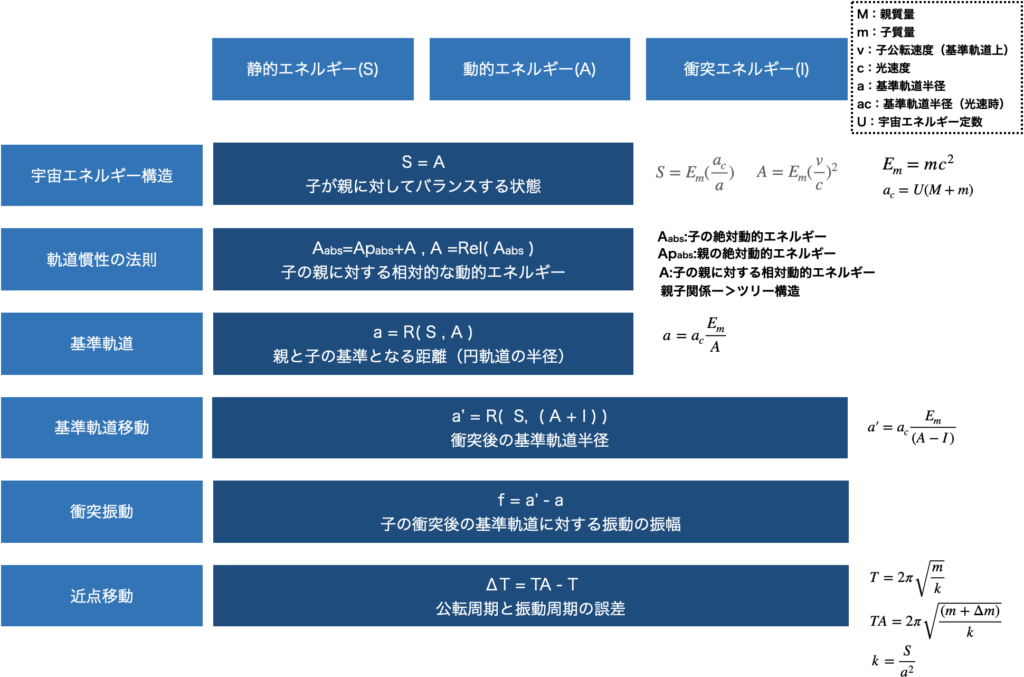
【仮定1】(「宇宙エネルギー構造」)
宇宙の静的エネルギー(S)と天体の動的エネルギー(A)は、2天体間でバランスする。
【補足】
●「静的エネルギー」は2天体間で発生する宇宙空間のエネルギー。
(2天体間の距離が大きくなるほど小さくなる)
●「動的エネルギー」は天体が動くために天体自身に保持しているエネルギー。
(天体の速度が速くなるほど大きくなる)
【仮定2】(「軌道慣性の法則」)
「親」の静的エネルギーと動的エネルギーは「子」に継承する。(親子関係)
親子関係は必ず存在して、天体は「ツリー構造」になっている。(=すべては2体問題で解決)
【補足】
●2天体の質量の大きい天体を「親」、質量の小さい天体を「子」とする
【仮定3】(「基準軌道」)
S(「静的エネルギー」) = A(「動的エネルギー」)の位置(a…基準軌道半径)で、円軌道上を「子」は移動する。
【仮定4】(「基準軌道移動」)
「子」に他の天体などが衝突した場合、「子」の動的エネルギーが変化し、静的エネルギーと動的エネルギーがバランスする方向に移動する。そして、「基準軌道半径」が移動する
【仮定5】(「衝突振動」)
「基準軌道移動」が発生すると、移動先の「基準軌道半径」を中心に、近点または遠点からの距離を振幅に振動する。
【仮定6】(「近点移動」)
「公転周期」と「振動周期」が異なる時に近点移動が発生する。
基本は「公転周期」=「振動周期」ですが、衝突などにより、天体の質量が変化すると、
振動周期が変化し、「公転周期」と「振動周期」が異なり、近点移動が発生する。
—————————————————————————-
【定義1】(静的エネルギーの大きさ)
S=Em x (ac/a)
Em:質量mの質量エネルギー(mc2)
sc:光速時の基準軌道半径
a : 基準軌道半径
【定義2】(「動的エネルギー」の大きさ)
A=Em x (v/c)2
Em:質量mの質量エネルギー(mc2)
v:天体の速度
c:光速度
【定義3】(「公転周期(T)」)
「子」が「親」の周りを1周回る時間
【定義4】(「振動周期(TA)」)
「子」が「親」の周りを、近点から近点、または遠点から遠点まで戻ってくるまでの時間
を、前提として、「重力はない」へと論破したいと思います。
運動エネルギーと位置エネルギーによる楕円運動
高校の物理で運動エネルギーについて習った。それは

m:質量、v:速度 と習った。これは、楕円軌道やホーマン軌道を求めるとき、また、位置エネルギーと運動エネルギーの保存などで使った。次に「ほーマン軌道」の時のエネルギーバランスの式がwikiに載っていたので、掲載する。

等号式の真ん中が、右側第1式が「天体など」の運動エネルギー、第2式が任意の位置rの位置エネルギー、一番右の等号の右側の式が長半径の2倍の位置の位置エネルギーでそれと、先ほどの運動エネルギーと位置エネルギーを加えたエネルギーと等しくなるという式である。なんとなく意味はわからないではないが、なぜ、長半径の2倍位置の位置エネルギーと等しくなるのかがよくわからない。
そもそも、天体の進行方向の運動エネルギーは

なのかというところも、宇宙エネルギー構造からすると疑問である。
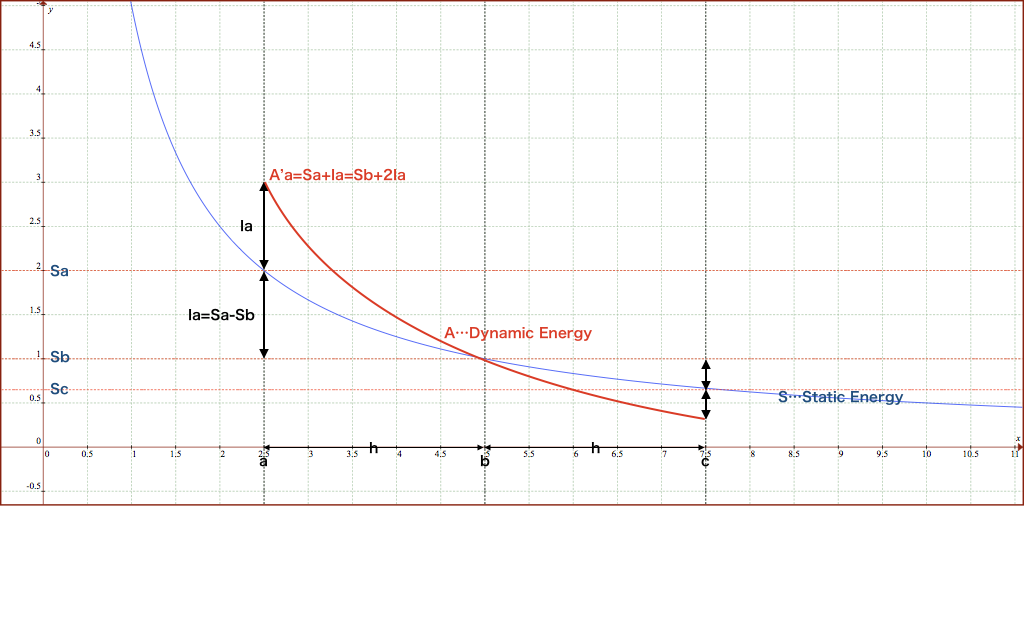
宇宙構造からの楕円軌道
そこで、宇宙エネルギー構造を元に解釈してみる。そもそも、楕円軌道は、私の仮説ではあるが、衝突により楕円軌道になっている。その衝突エネルギーの分衝突位置でのエネルギーが増えるので、そのエネルギーを使って静的エネルギーとバランスする位置まで移動して、鎮座するというのが私の理論である。
衝突エネルギーをI、位置aでの静的エネルギーをSa、位置aでの動的エネルギーをAva、鎮座する位置をbとすると、任意の位置rの静的エネルギーをSr,任意の位置rの動的エネルギーをAvrとすると、位置aでの静的エネルギーと動的エネルギーはバランスしているので、Sa=Avaの状態です。そこに、衝突天体が衝突エネルギーIで衝突すので、動的エネルギーはA’va = Ava + Iとなります。つまりA’va = Ava + I = Sb+ 2I、Sa – I =Sbとなります。任意の位置rでは、A’vr = Sr + Ir、Sr – Ir = Sbとなります。このことから、A’vr + Sb = 2Srとなり、鎮座します。このことから、位置bの静的エネルギーSbは(基準軌道=中心天体から長半径の距離(b))Sb = 2Sr – A’vrとなります。
wiki の式は。位置rの運動エネルギー+位置rの位置エネルギー=長半径の2倍の位置の位置エネルギー Kr + Pr = P2b
私の式は、衝突後の基準軌道位置bの静的エネルギー = 位置rの静的エネルギーの2倍 – 位置rの静的エネルギーとなります。Sb = 2Sr – A’vr
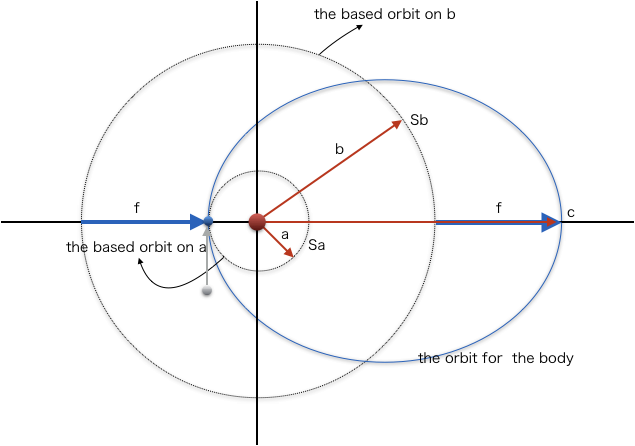
さらに、移動後の基準軌道bは、Sb = 2Sa – A’va = Sa – I より b=EA/(Sa – I) となります。EAは面積エネルギーで、光速時静的エネルギーScと光速時基準軌道半径acより、Sc x acです。
ホーマン軌道(Wiki)
Wikipedia “Hohmann transfer Orbit” より引用
For a small body orbiting another much larger body, such as a satellite orbiting Earth, the total energy of the smaller body is the sum of its kinetic energy and potential energy, and this total energy also equals half the potential at the average distance a (the semi-major axis):
Solving this equation for velocity results in the vis-viva equation,

where: