

振動周期(水平)
振動周期と振動エネルギー
振動周期 要素
振動(水平)方向 単振動 運動エネルギー・位置エネルギー
振動方向 軌道要素の順序
円軌道
楕円軌道
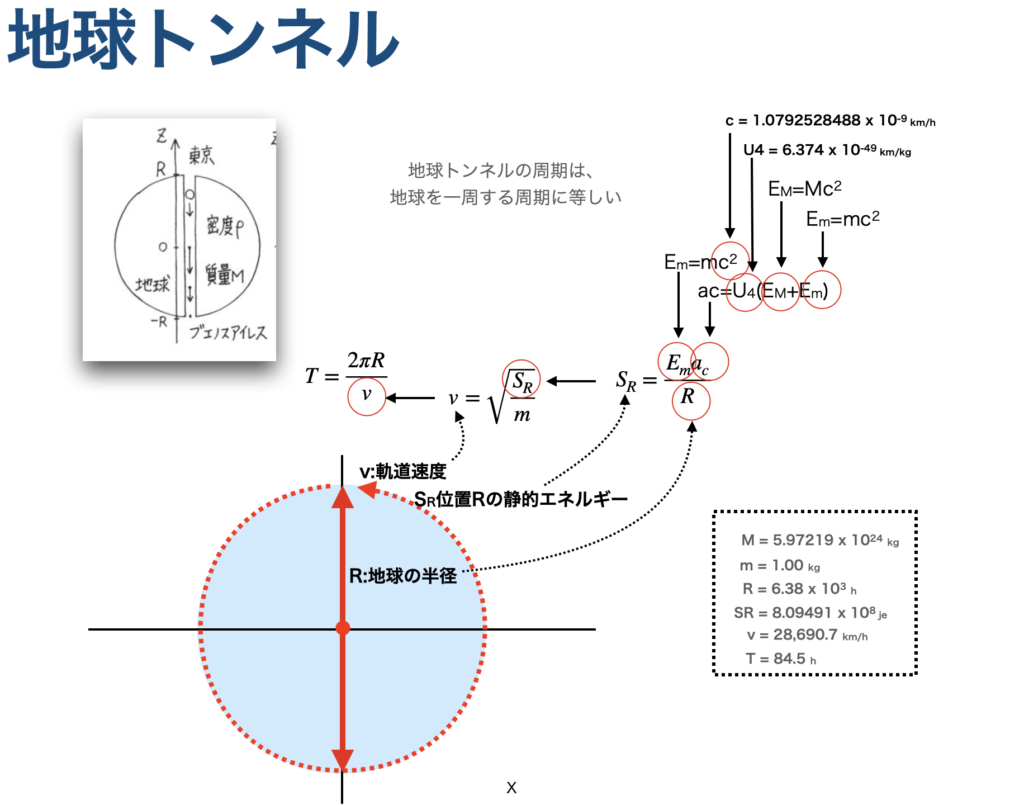
地球トンネル

振動周期(水平)
振動周期と振動エネルギー
振動周期 要素
振動(水平)方向 単振動 運動エネルギー・位置エネルギー
振動方向 軌道要素の順序
円軌道
楕円軌道
地球トンネル
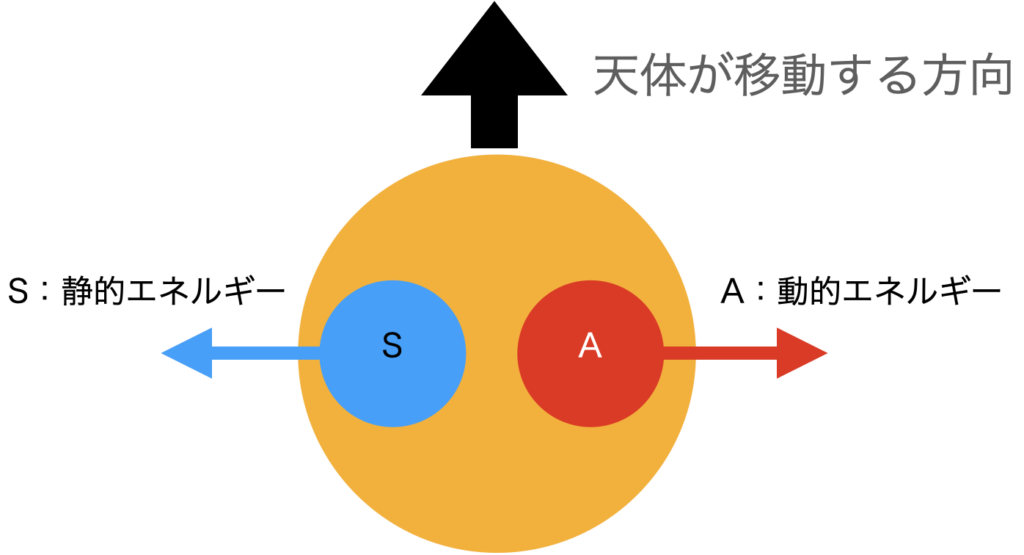
静的エネルギーと動的エネルギー
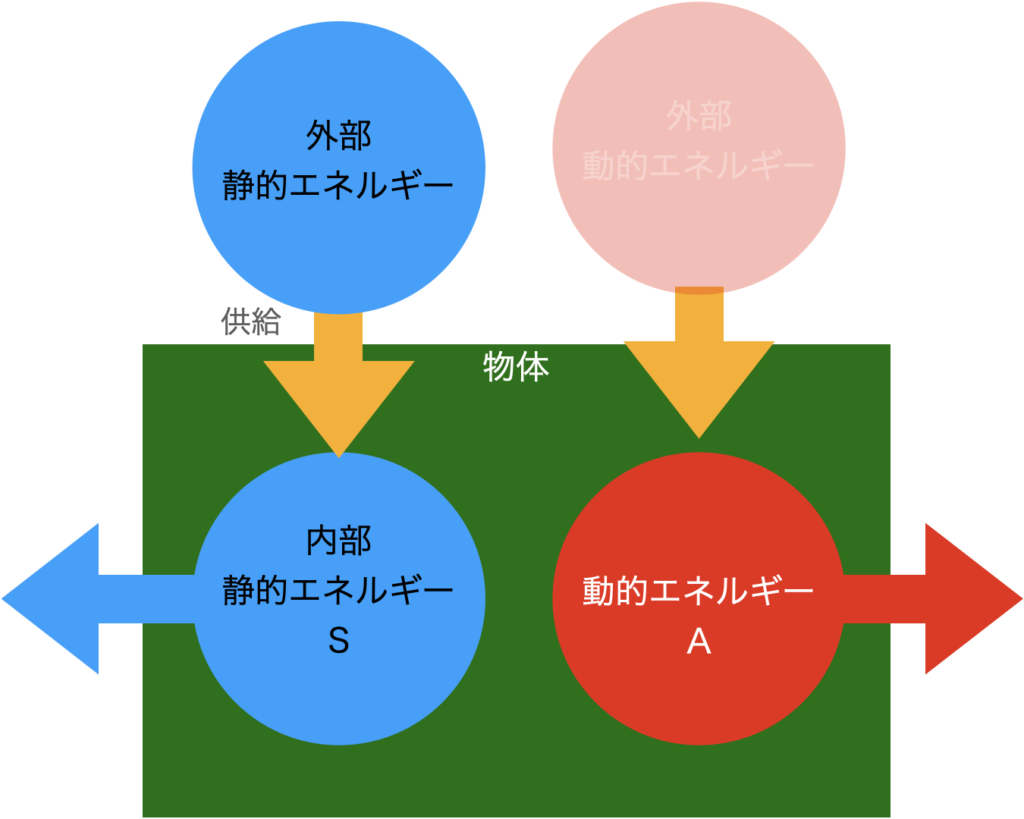
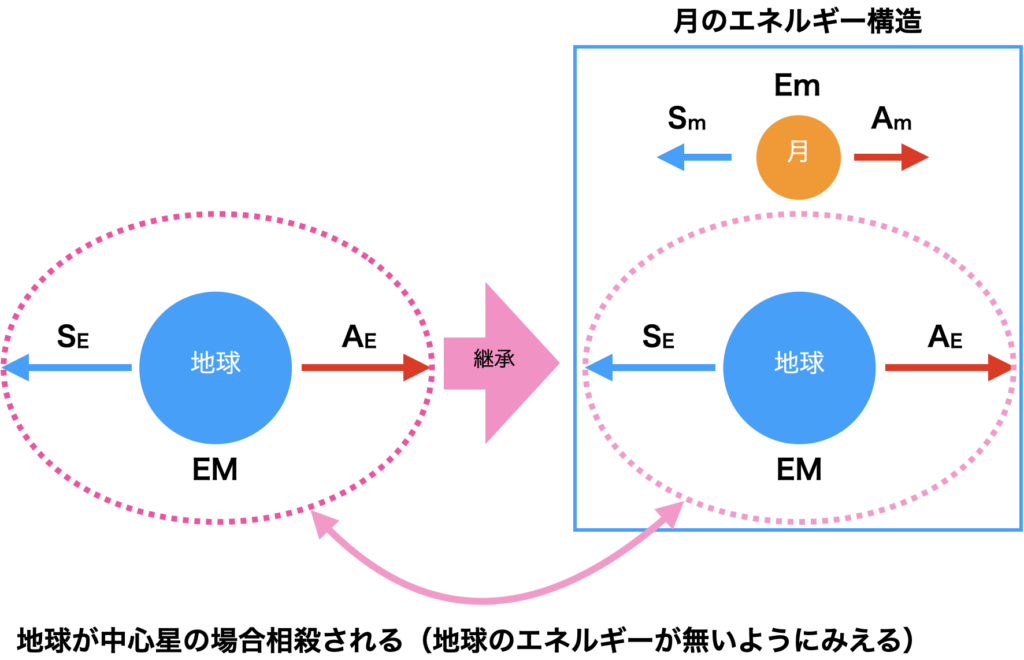
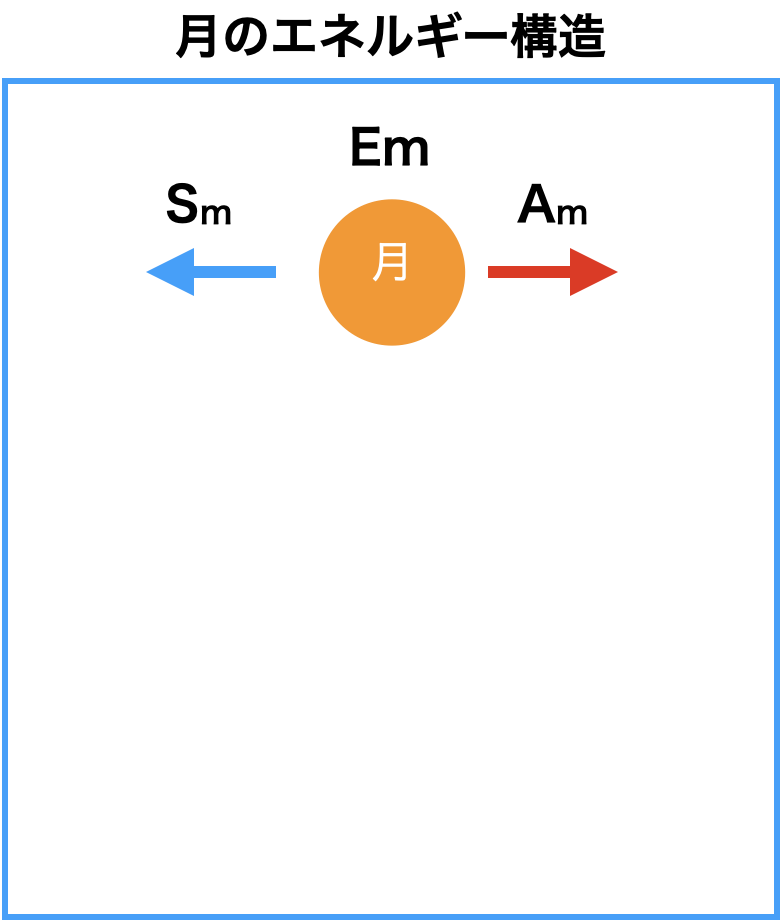

境界圏の静的エネルギー
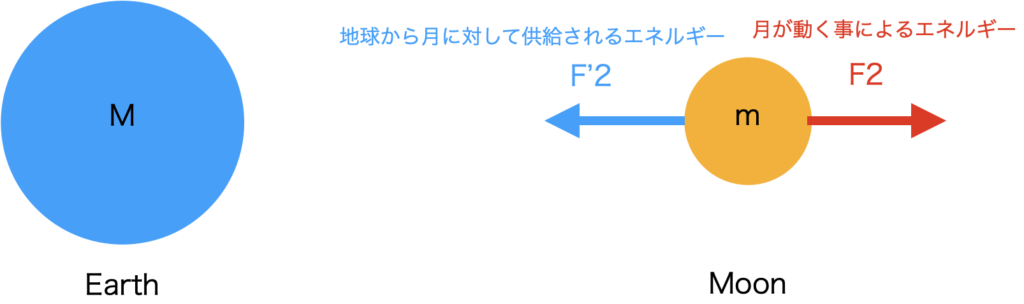
エネルギーバランス
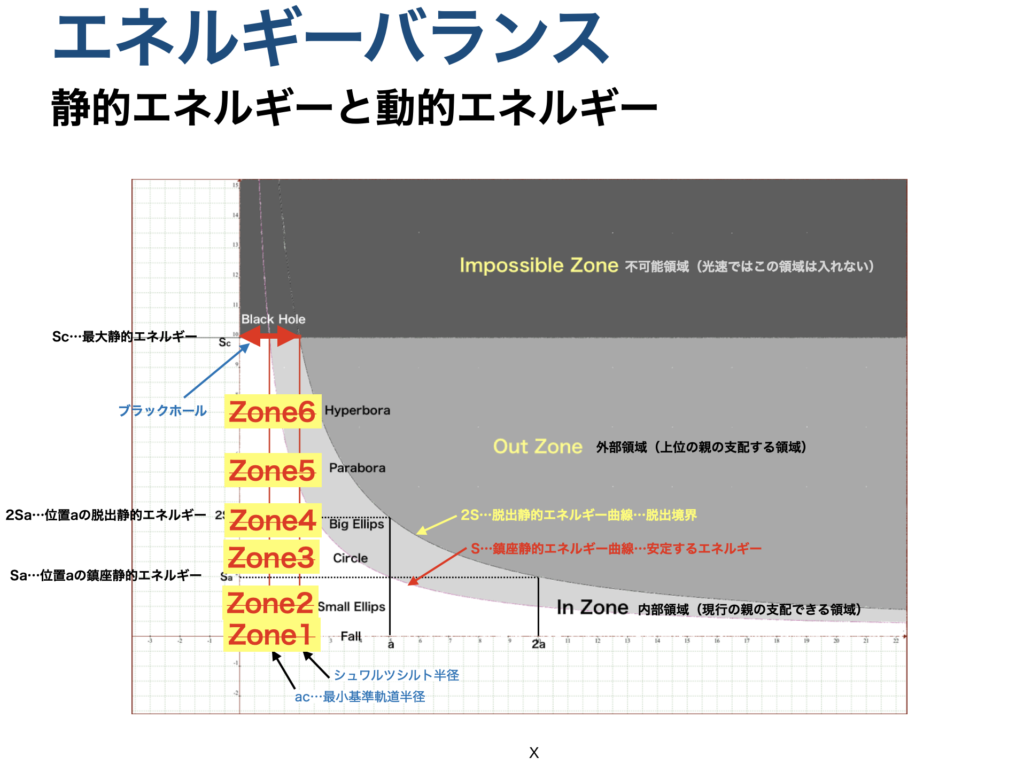
静的エネルギーと動的エネルギーのバランス
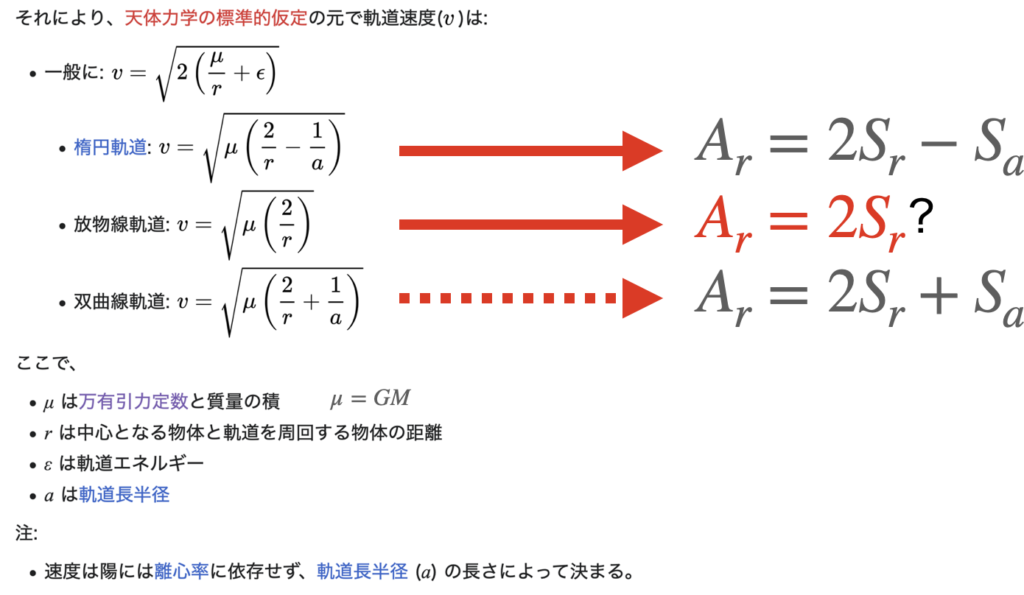
軌道速度
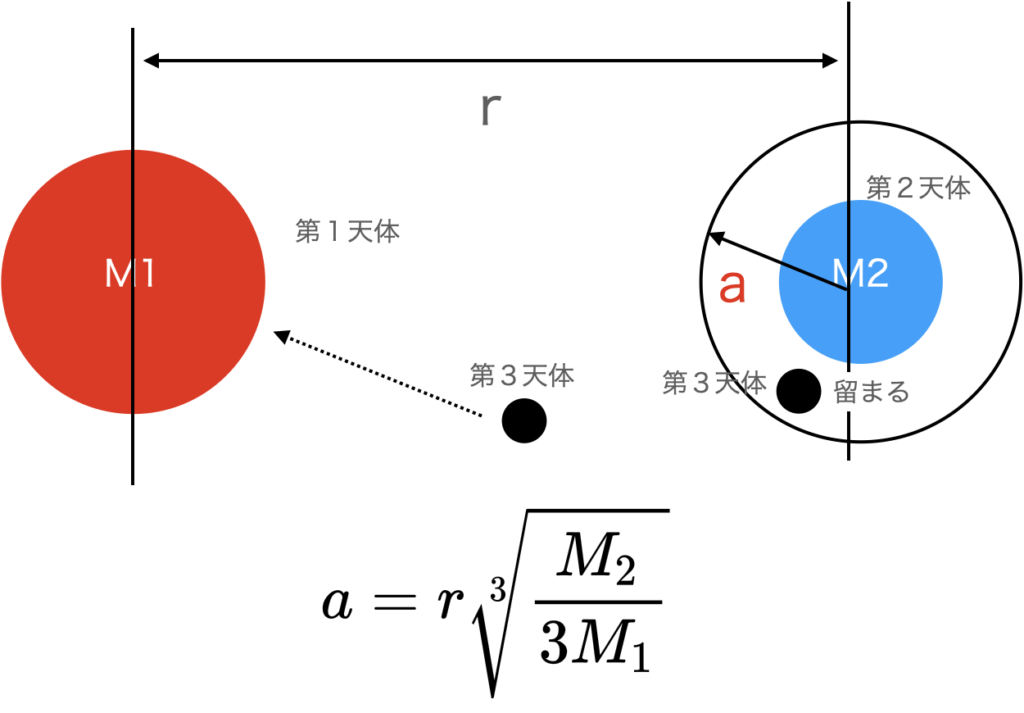
ヒル球
境界圏の静的エネルギー
親判定

公転周期エネルギー

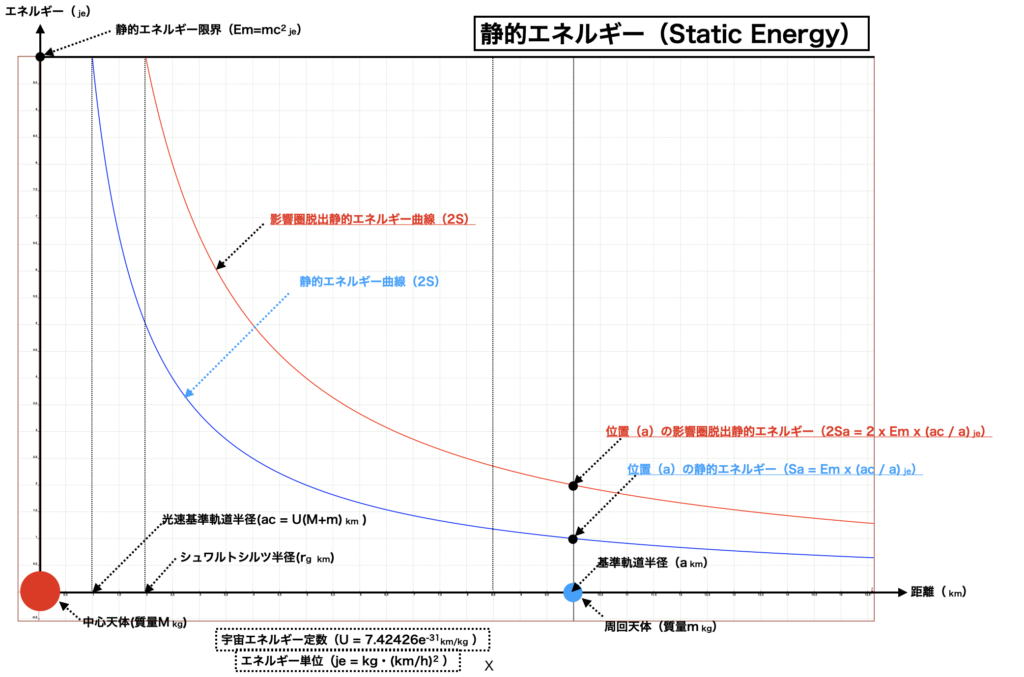
静的エネルギー空間・静的エネルギー・動的エネルギー

静的エネルギー・静的エネルギー空間

光速基準軌道半径

静的エネルギー

動的エネルギー

静的エネルギー・動的エネルギー

静的エネルギー空間

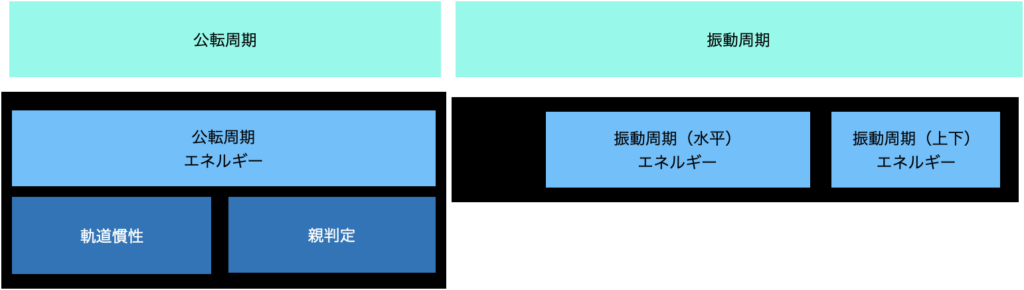
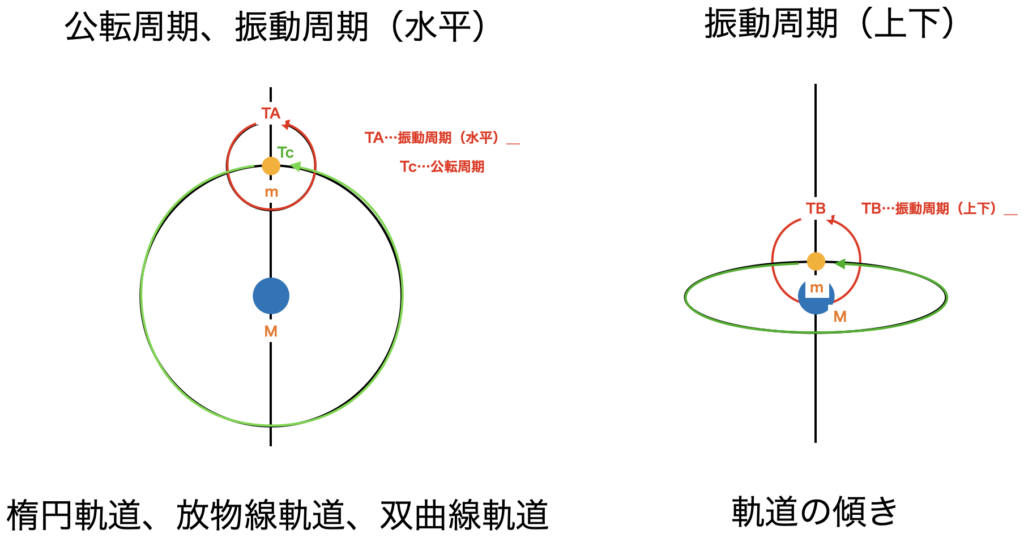
公転周期は中心星の周りを集会天体が回る軌道です。
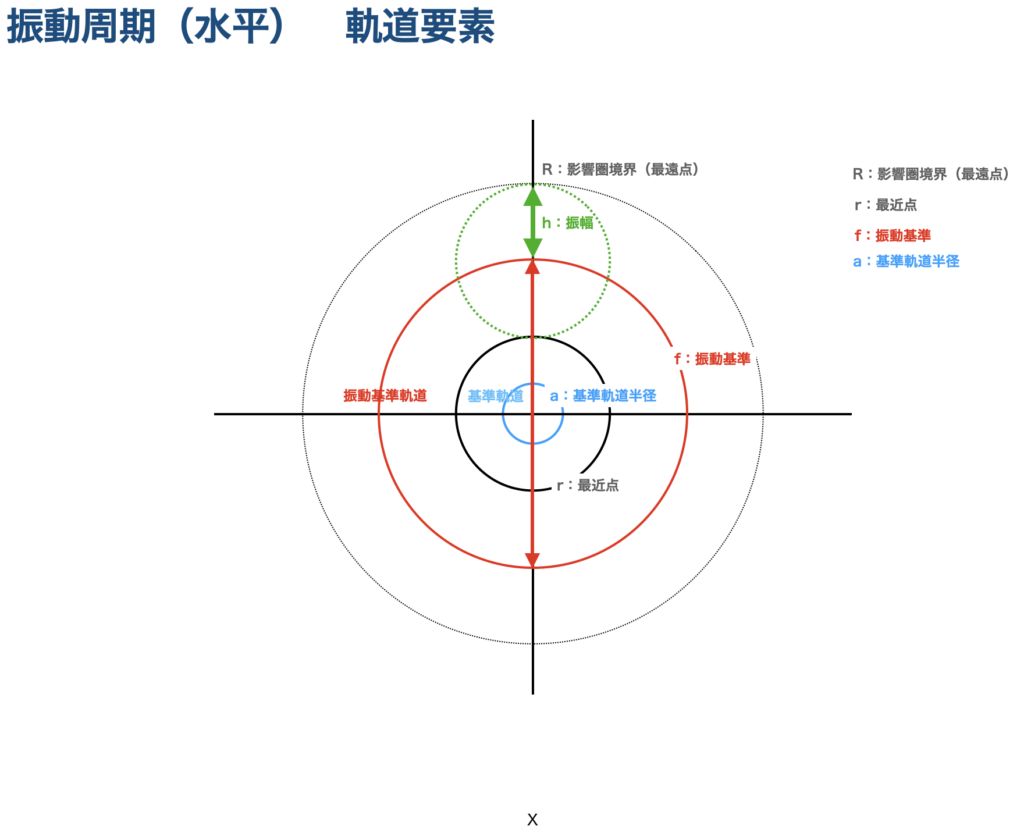
振動周期は、基準軌道となる軌道(基準軌道)を中心に
振動する周期です。
この2つの周期で軌道が決まります。
振動周期は、水平方向と垂直方向(上下)の2つがあります。
水平方向の振動はは、軌道の形(楕円、放物線、双曲線など)を
決める要素の1つになります。
(ナレ)ここは、田舎の研究所。
動物好きの女性所長と、頼りになる研究員で宇宙の研究をしている。
そんな中、ある日
保護猫のチャーがあらわれる。びしょ濡れで研究所に顔をだした。
それから、ずっと研究所に居ついた。そして、チュールがお気に入り。
というか、チュールしか食べない。
チャーは、研究所に来る前は、
猫軍団といっしょにあそんでいた。
チャーが研究所に来てから、1年程たった夏の日、
研究所がある町に、
猫嫌いなおじさんが居て、
猫狩りを始めた。
それで、
猫軍団は、あわてて、研究所に逃げてきたのだ。
今や猫軍団は、研究所に住み着いている。
研究所は、
宇宙の研究をしているが、
あまり良い成果があがらない。
論文も駄作続出。
さてさて、研究員は、
スクラップ アンド ビルト だ!!
と意気込んでいる。
はたして、何かいいアイデアや理論が生まれるのか!
(エンディ)まあ、ここで私は一言言いたい!
「もっと宇宙の構造は簡単ではないかと。」
「宇宙の動きは、簡単な数学で動いているに違いない。」
でなければ、宇宙自体が、
超スーパーコンピューターみたいな頭脳を持っていなければ、
この宇宙を保つのはむずかしいです。
(研究員)3体問題すら解けない宇宙って変じゃないですかね!!
3つの天体の動きが、計算できないって。
そりゃ根本の考え方が違っているんじゃないかと思うんですよ。
宇宙は、3体問題は発生しないということでです。(言い切った!)
2つの場合は明確にわかるんだから、
すべては2体問題で解決できるんじゃないかと思うんですよ。
(エンディ)
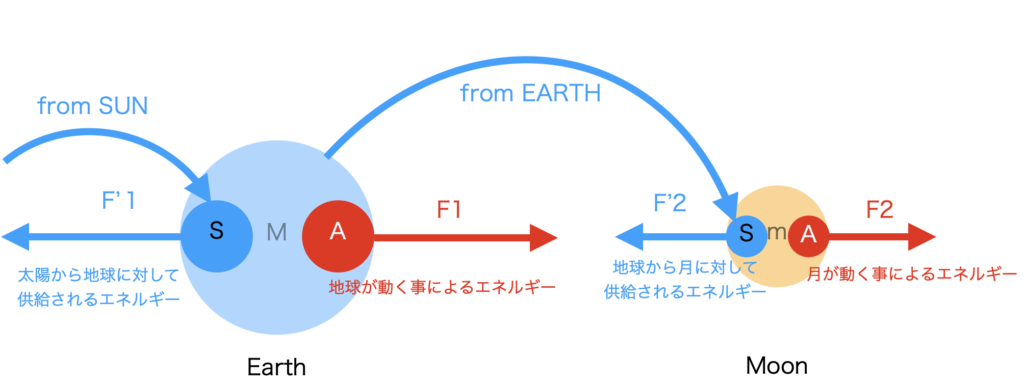
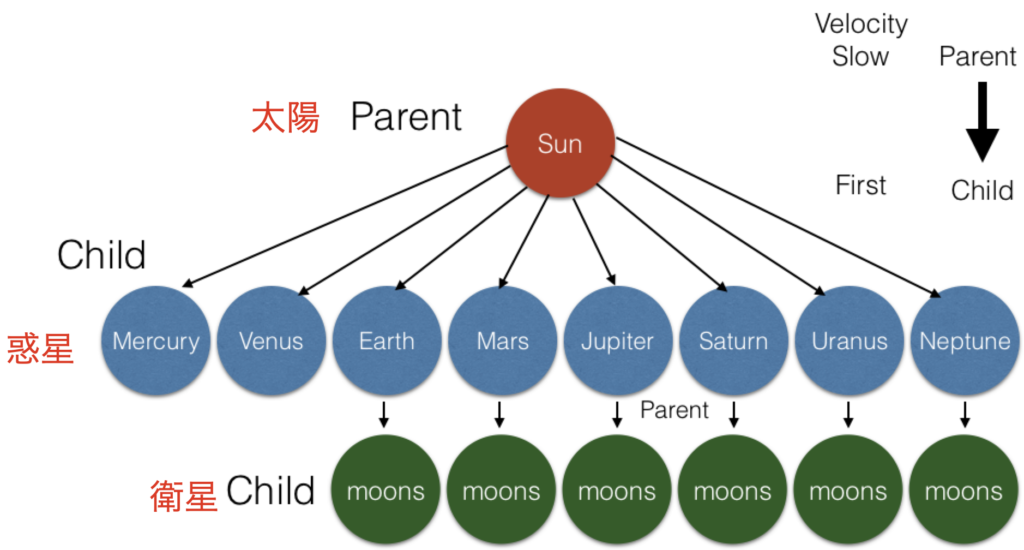
太陽、地球、月といった関係は、
太陽と地球、地球と月って感じの2体問題なら
宇宙全体が全体がスッキリ!します。
(研究員)太陽が月に関与してくると3対問題になって、動きがややこしくなるんだよな。
でも、ニュートンは万有引力っていってるし、
2対問題だけで、すべて説明するのは難しいんじゃないか。
(エンディ)まあそうだけどね
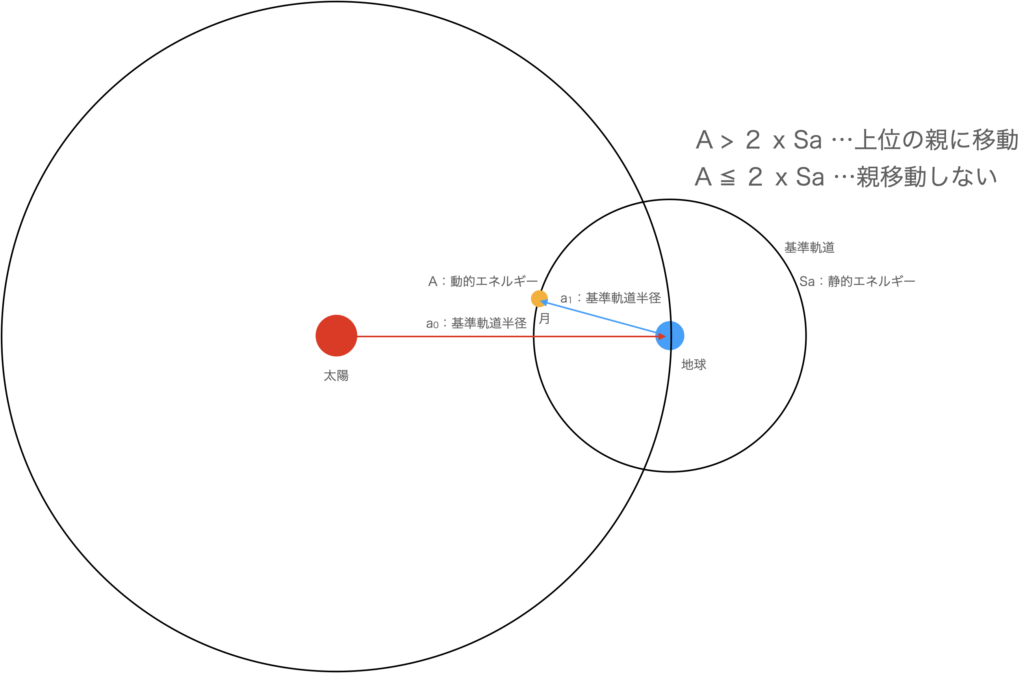
(研究員)太陽は動いているのに、
太陽が止まっているとみなしても
地球は太陽の周りをうまく回ります。
月は、地球の周りを回っていますが、
太陽の周りも地球といっしょに回っています。
しかし。月から見た地球は、止まっているとみなしても、
うまく説明がつきます。問題ありません。
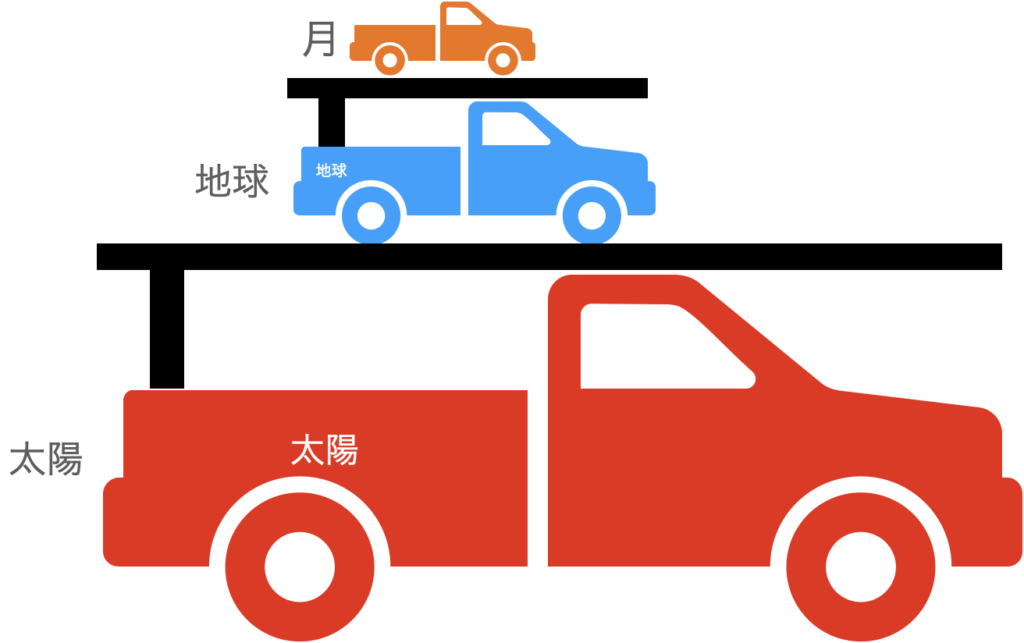
(エンディ)そうだね、慣性の法則ににています。
太陽のトラックの荷台に、惑星が乗っていて、
惑星のトラックの荷台に、衛星が乗っている、
ようなイメージです。
(研究員)うちのカメたちも同じです。
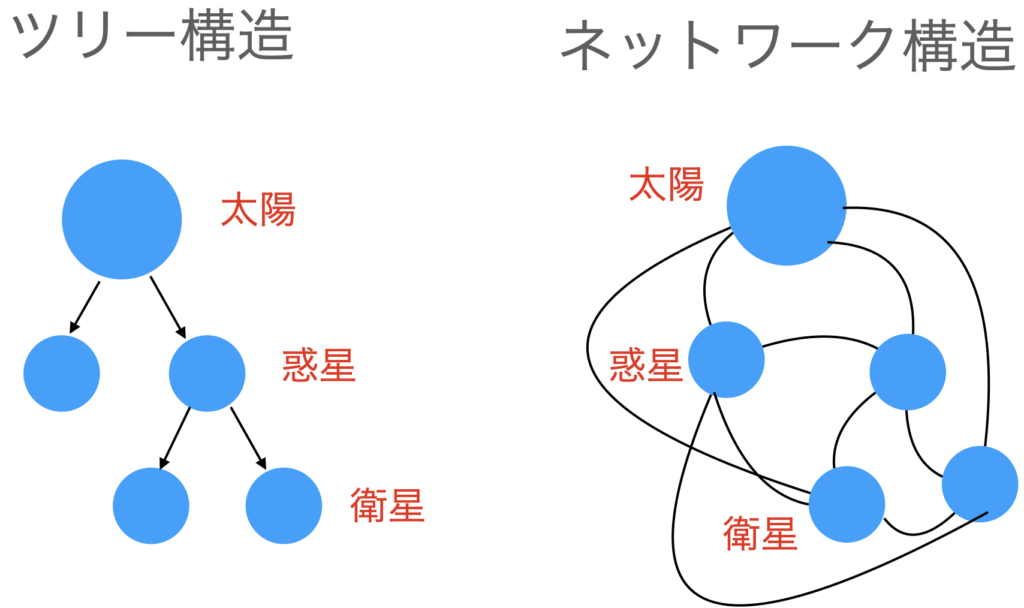
ニュートンの「重力理論」は、
全ての天体は、関連しあって動いている。
つまり、ネットワーク構造です。
ネットワーク構造の場合、宇宙は複雑な動きをするはずです。
しかし、
太陽系の惑星、衛星の動きは、
宇宙は秩序を持って動いています。
言い過ぎかもしれませんが。そのように見えます。
それでは、そのあたりから研究をはじめてみますか。
そうしましょう
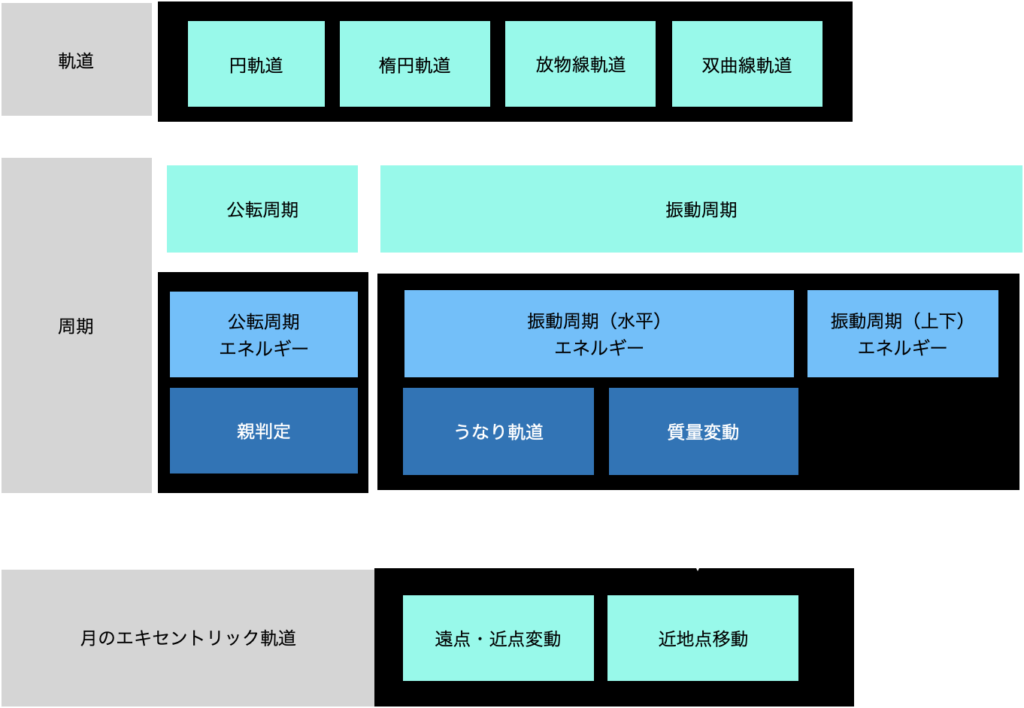
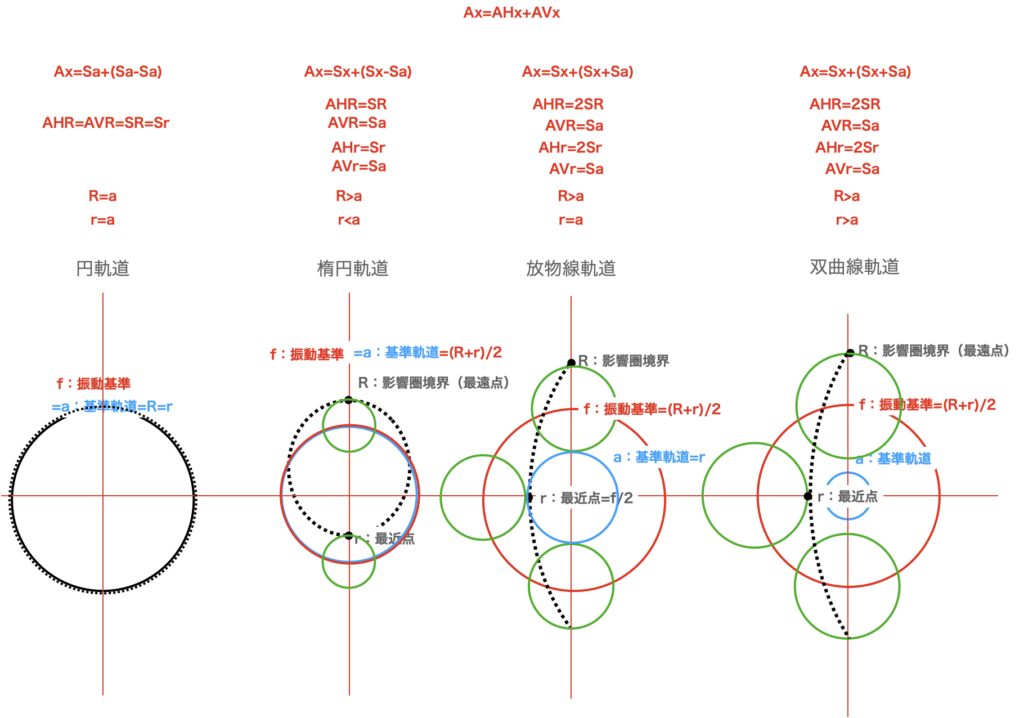
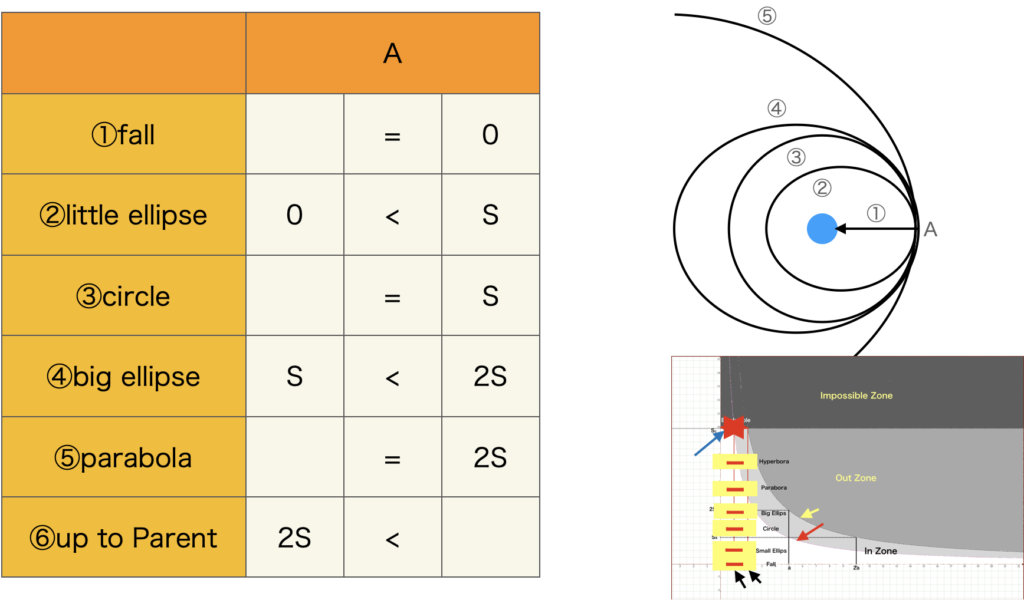
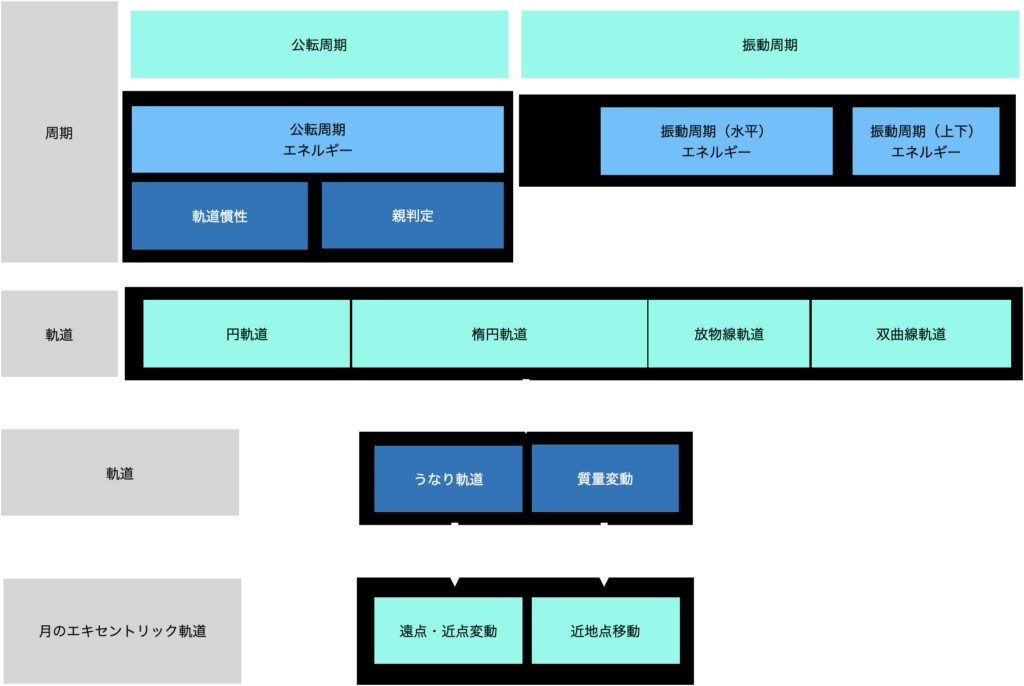
軌道種類は、
円軌道
楕円軌道
放物線軌道
双曲線軌道1
の4種類あります。
これらは、
公転周期と振動周期の2種類の周期があります。
というか、2種類の周期で軌道が決まります。
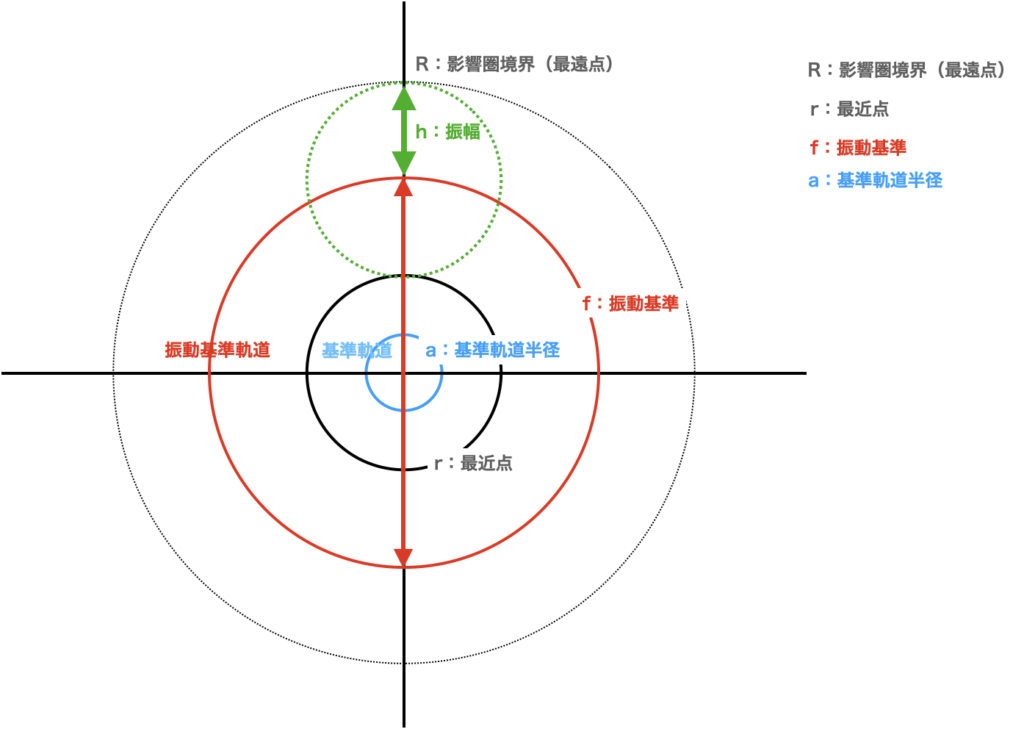
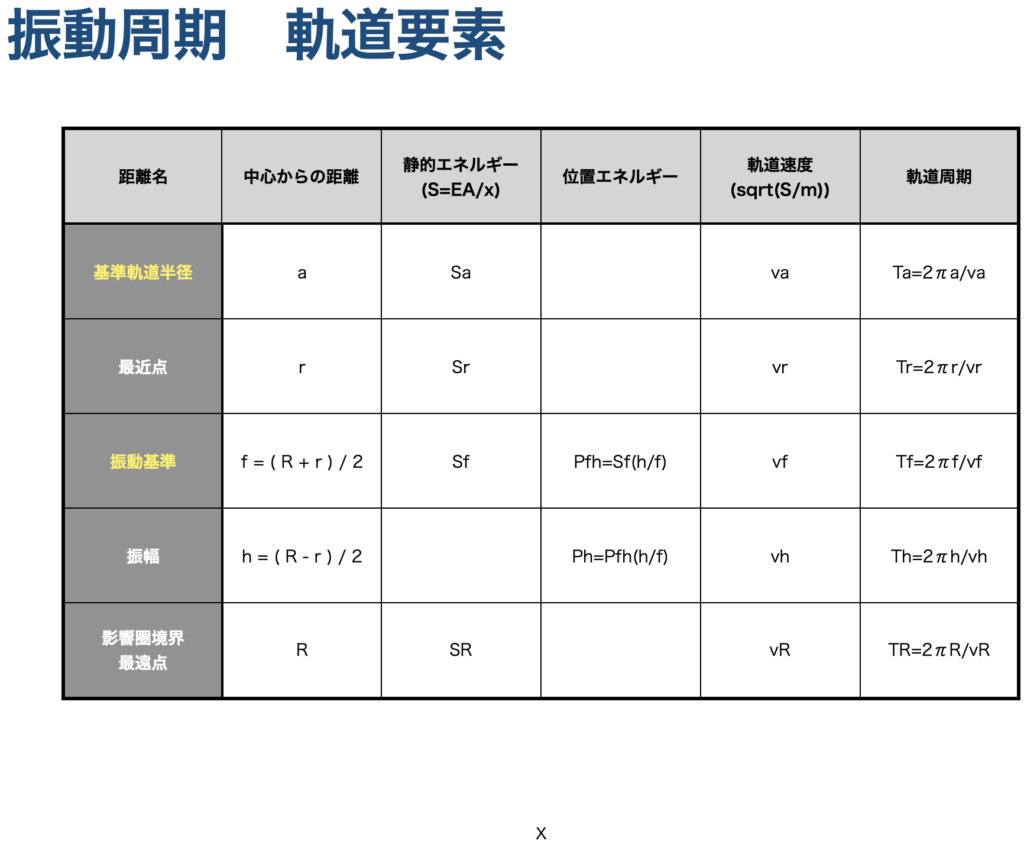
| 距離名 | 中心からの距離 | 静的エネルギー(S=EA/x) | 位置エネルギー | 軌道速度(sqrt(S/m)) | 軌道周期 |
| 基準軌道半径 | a | Sa | va | Ta=2πa/va | |
| 最近点 | r | Sr | vr | Tr=2πr/vr | |
| 振動基準 | f = ( R + r ) / 2 | Sf | Pfh=Sf(h/f) | vf | Tf=2πf/vf |
| 振幅 | h = ( R – r ) / 2 | Ph=Pfh(h/f) | vh | Th=2πh/vh | |
| 影響圏境界最遠点 | R | SR | vR | TR=2πR/vR |
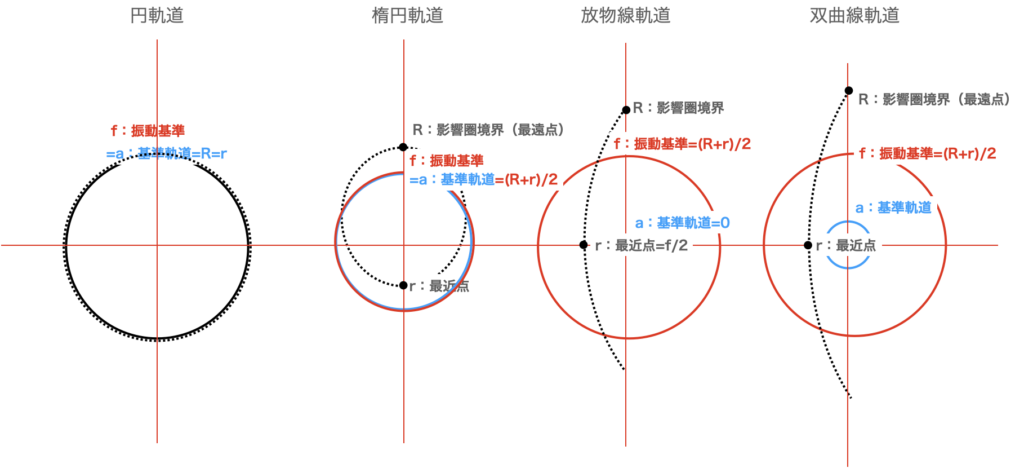
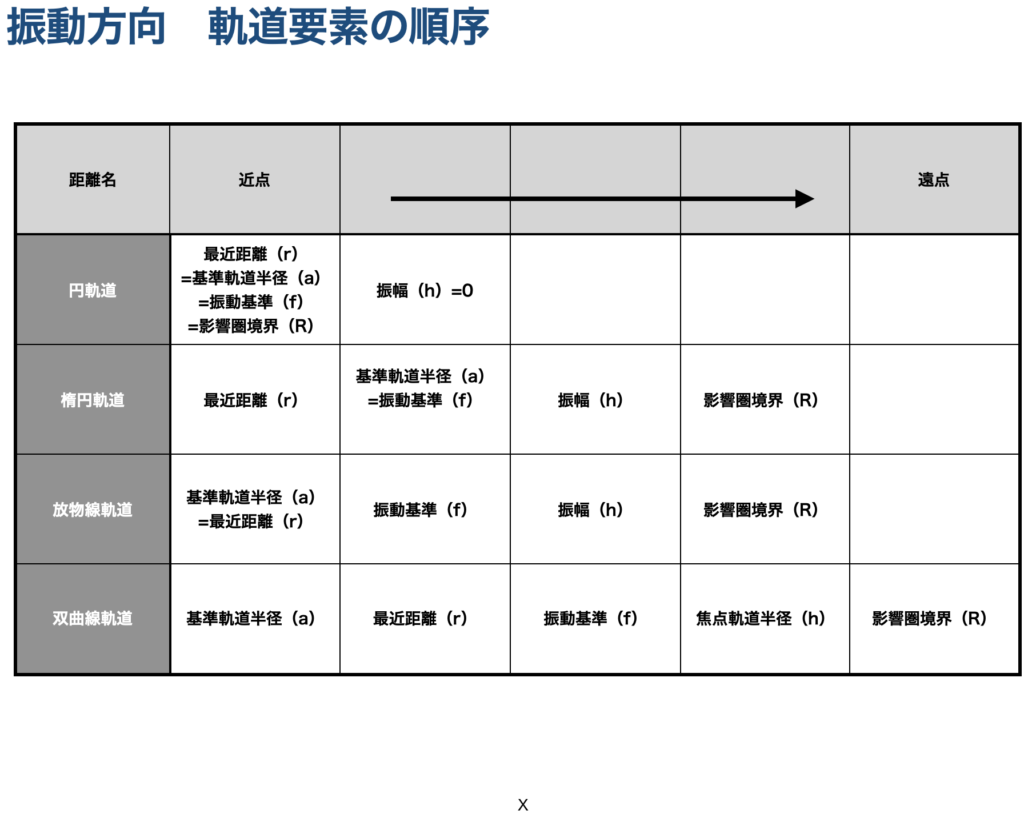
| 距離名 | 近点 | 遠点 | |||
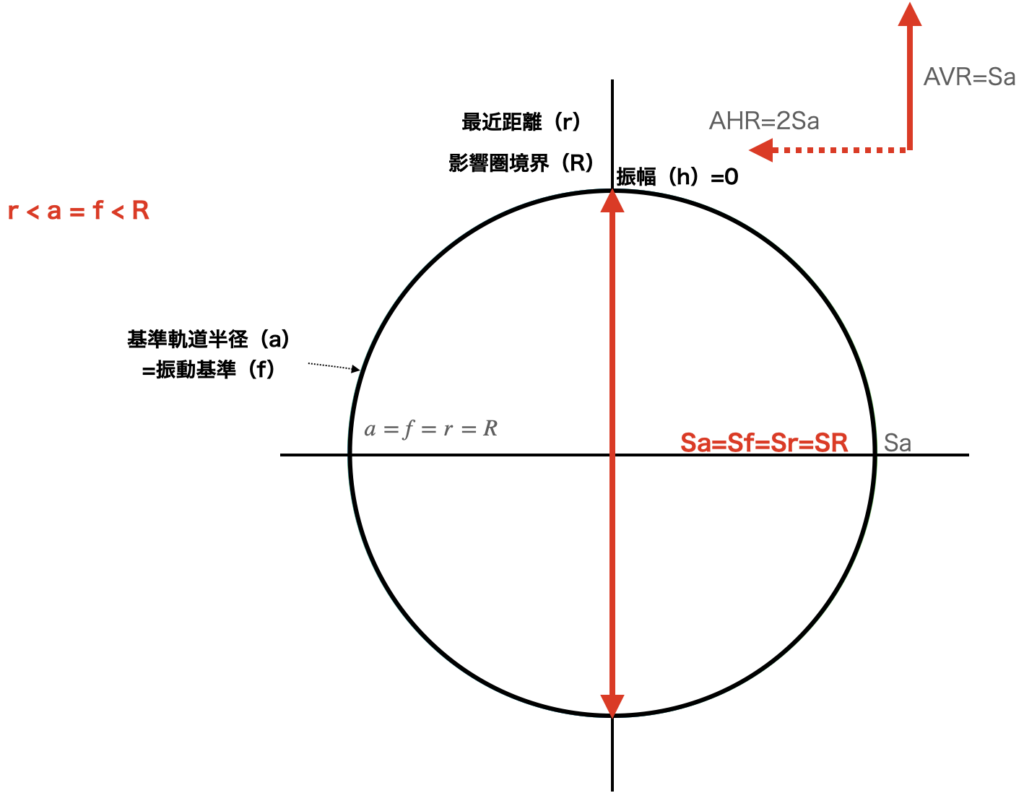
| 円軌道 | 最近距離(r)=基準軌道半径(a)=振動基準(f)=影響圏境界(R) | 振幅(h)=0 | |||
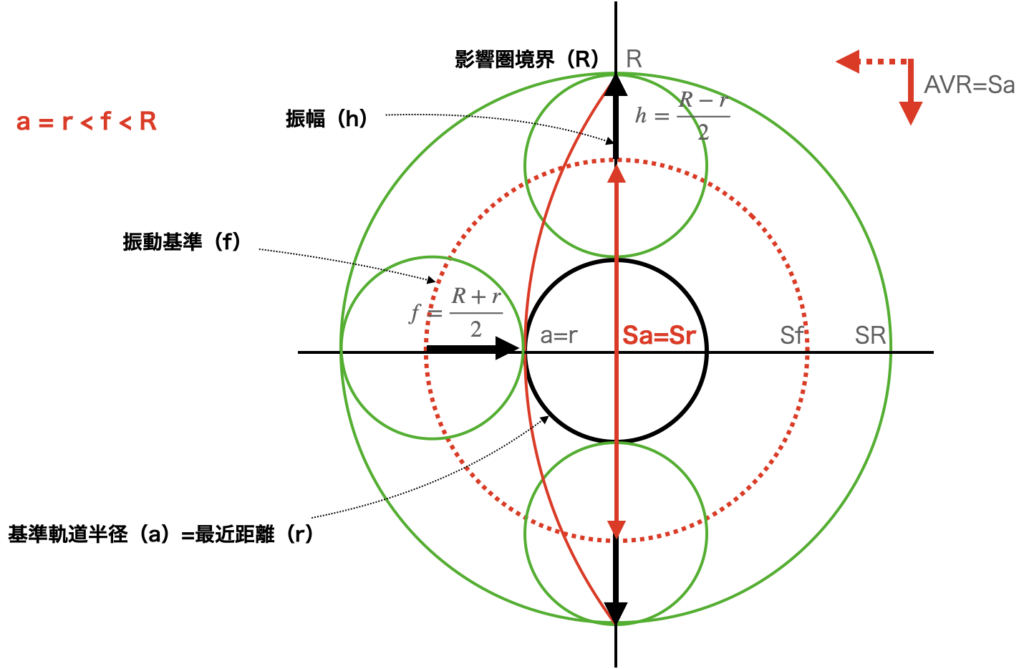
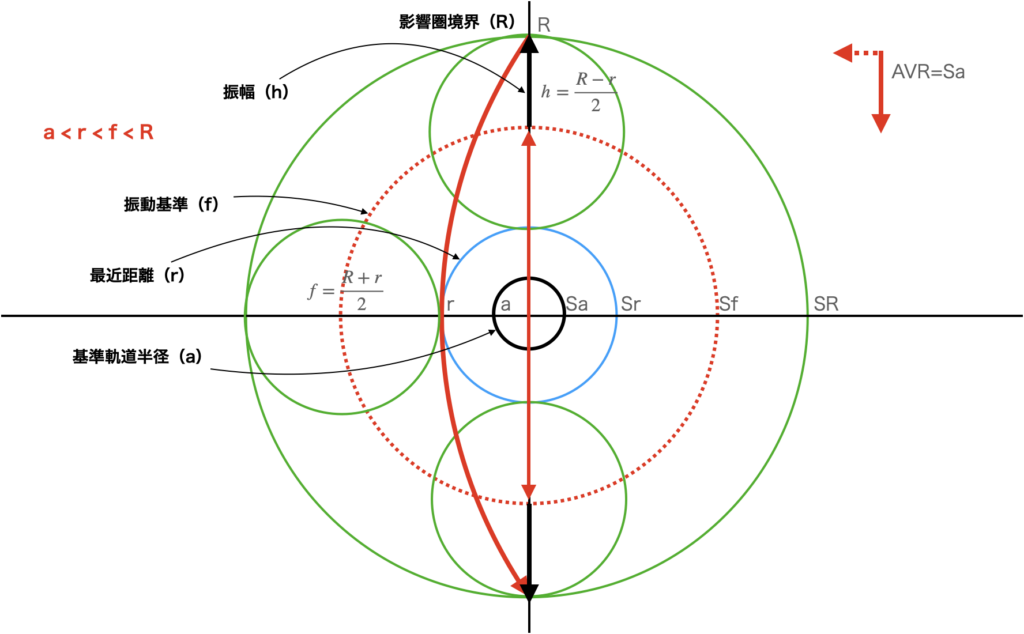
| 楕円軌道 | 最近距離(r) | 基準軌道半径(a)=振動基準(f) | 振幅(h) | 影響圏境界(R) | |
| 放物線軌道 | 基準軌道半径(a)=最近距離(r) | 振動基準(f) | 振幅(h) | 影響圏境界(R) | |
| 双曲線軌道 | 基準軌道半径(a) | 最近距離(r) | 振動基準(f) | 焦点軌9道半径(h) | 影響圏境界(R) |
円軌道
楕円軌道

放物線軌道
双曲線軌道
公転周期と振動周期による軌道はこのようになります。
前ブログで、双曲線軌道わかったと言ってしまいましたが、
検証した結果、間違っていました。
なかなか、おもうようにはいかないもです。
なので、少し違った角度から考えてみることにしました。
基準軌道半径 a がポイントです。
楕円軌道から双曲線軌道に変化する流れを考えてみた。
まあ、机上の空想なので、違っているかもしれませんが。
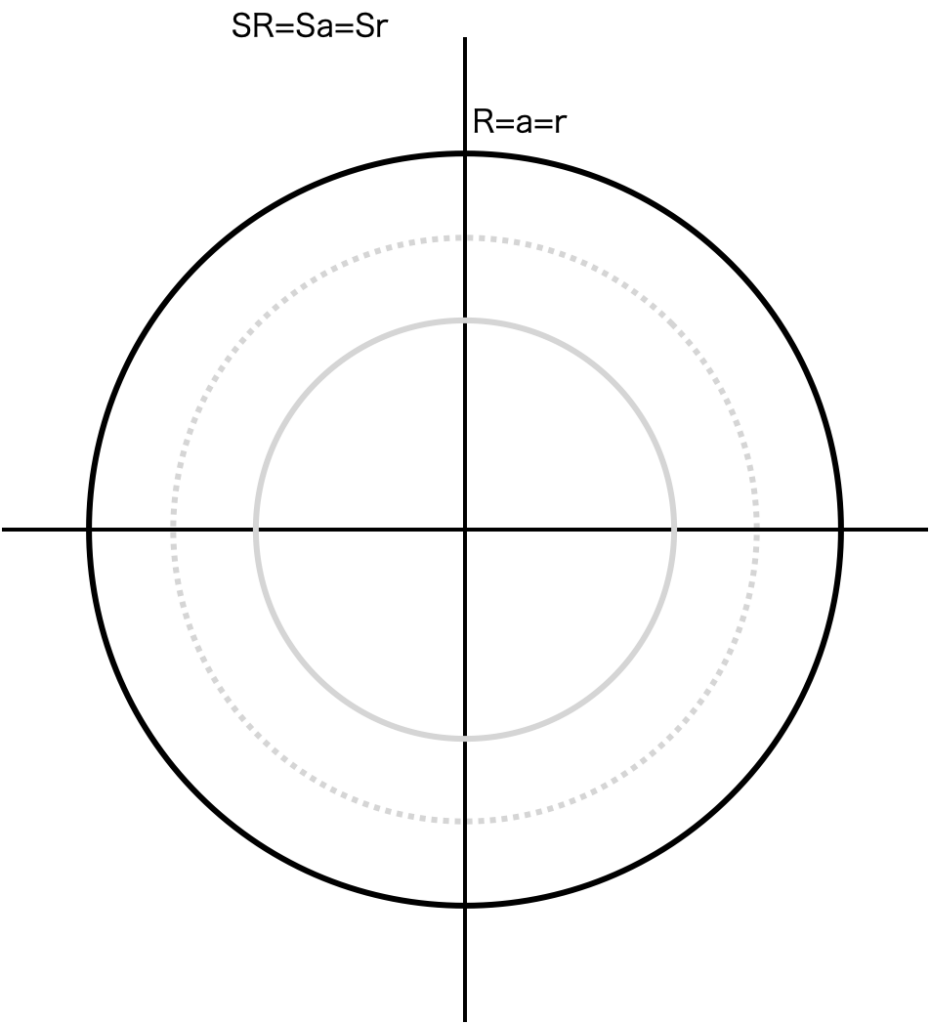
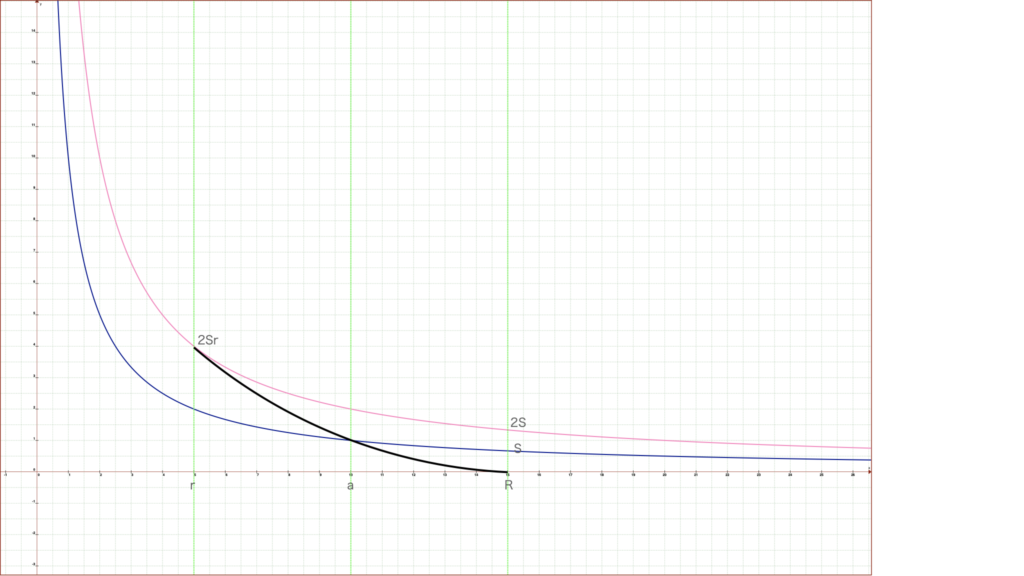
まず、楕円軌道の基準軌道半径を見てみると

基準軌道を中心に振動して、楕円軌道になります。
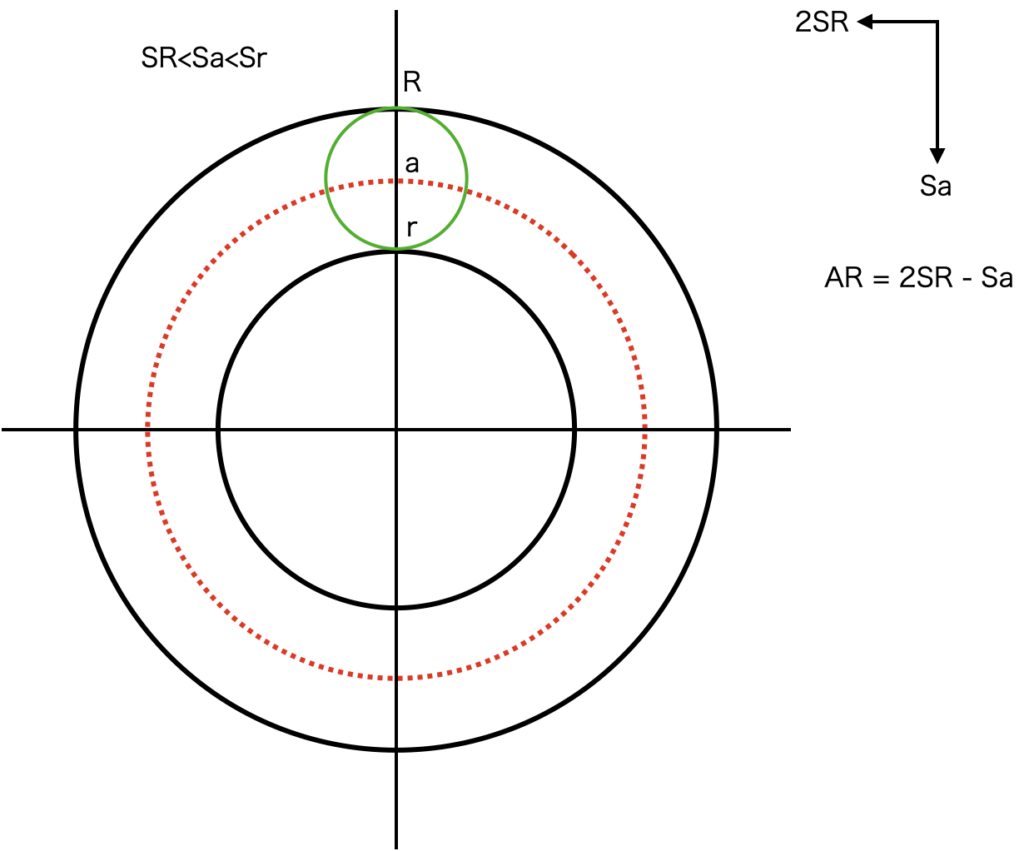
この振動をもう少し大きくすると
基準軌道は、Rの半分に近づきます。
楕円軌道がこのようになるのか、直線に近づくかは、検討が必要ですが。
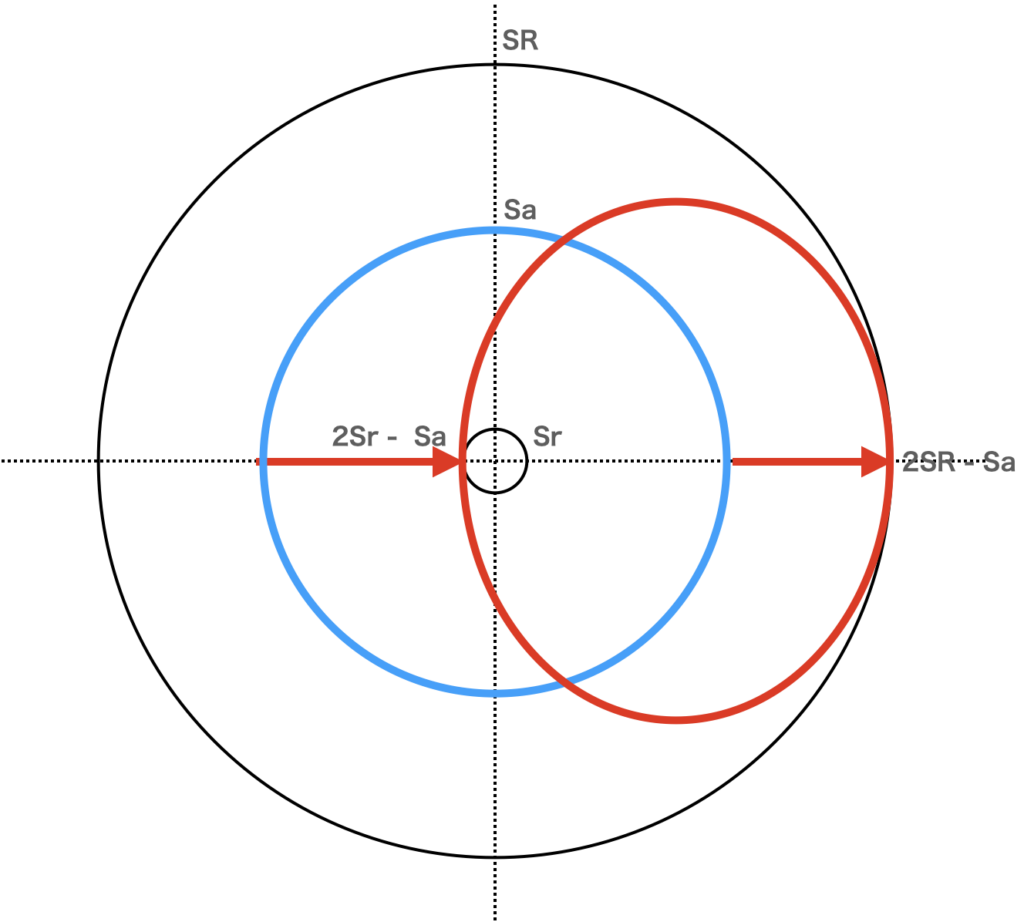
さらに、基準軌道がRの半分になると、
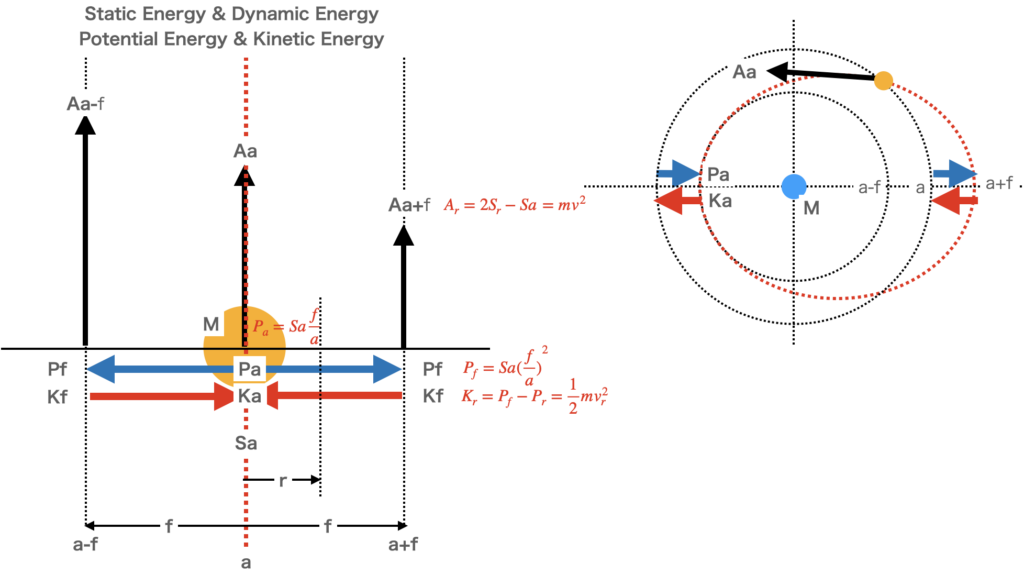
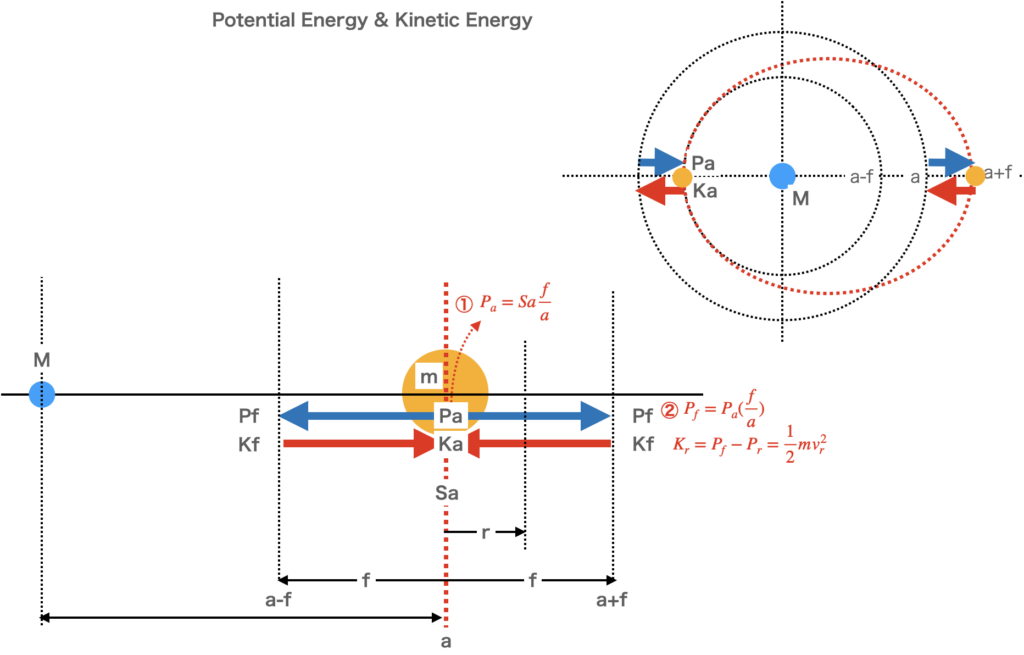
動的エネルギーは
位置 r で 2Sr になり
位置 R で 0 になります。
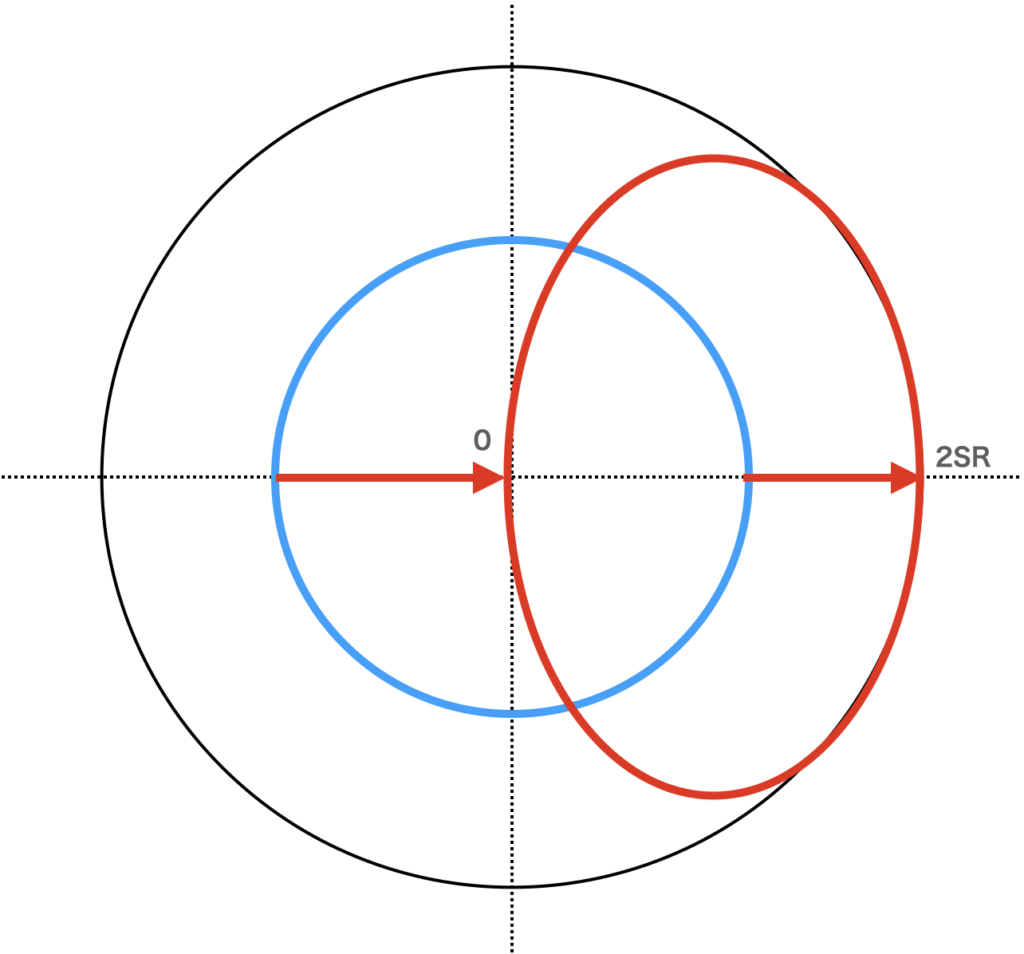
これは、放物線軌道になります。
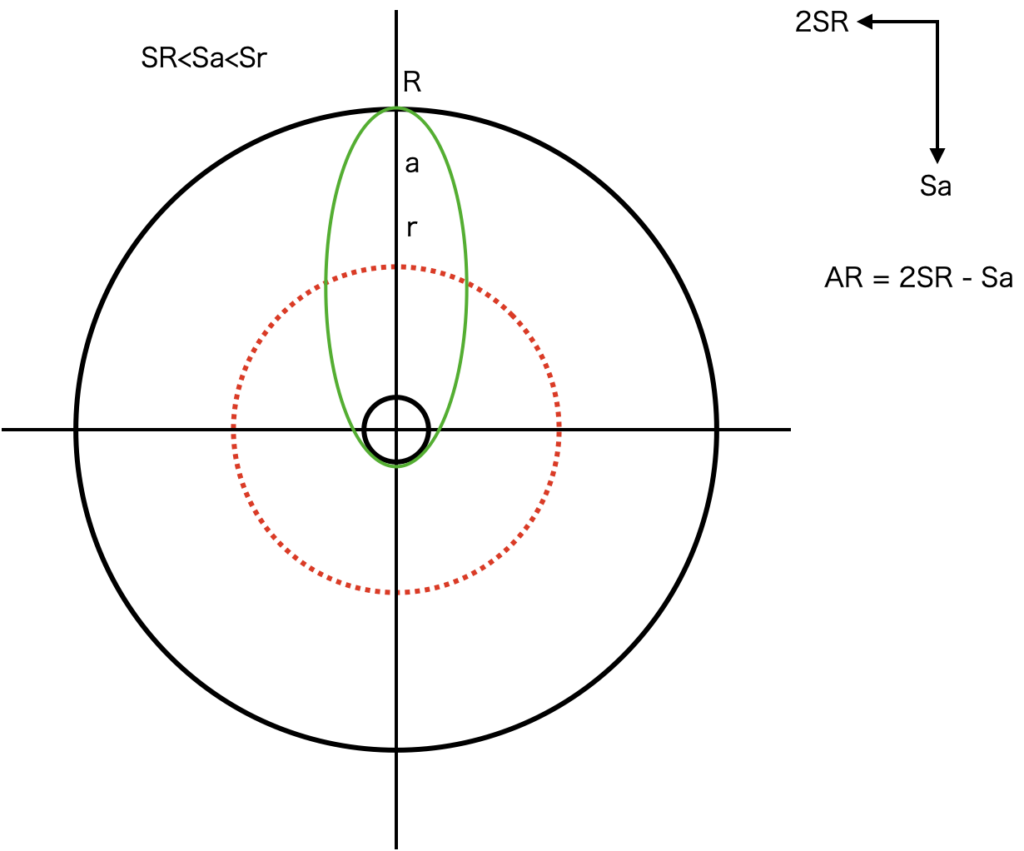
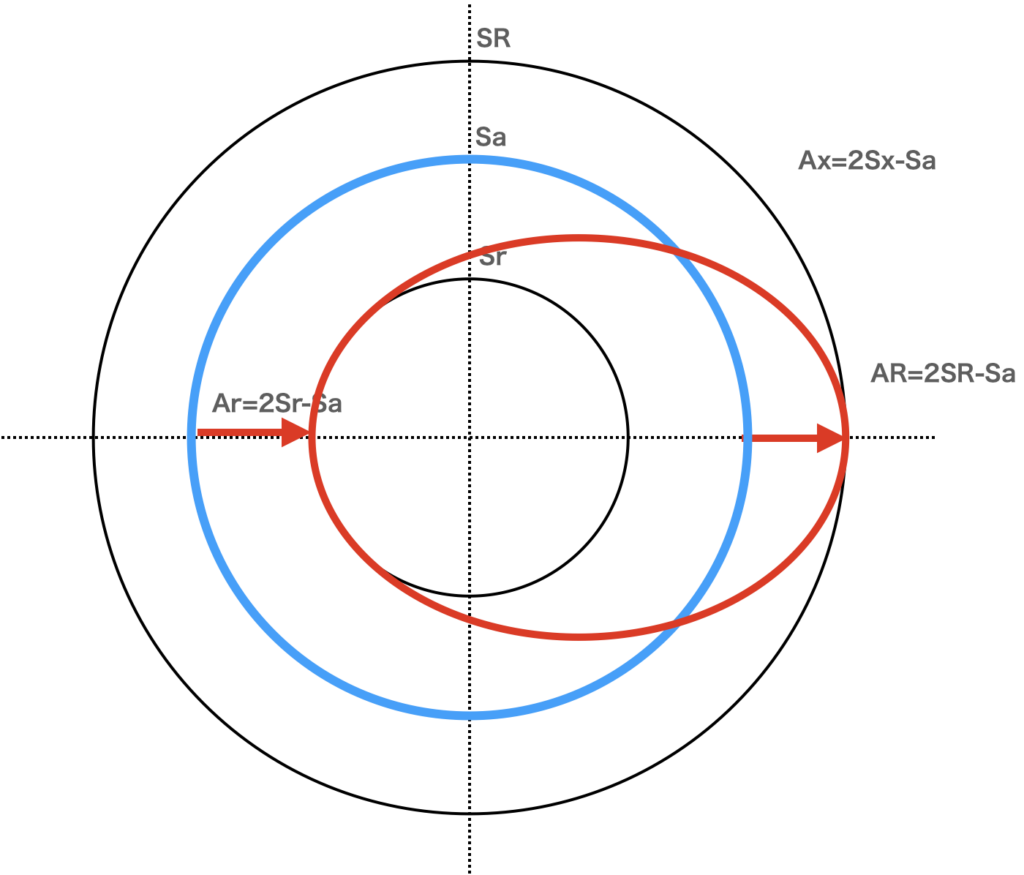
そして、さらに振動が大きくなると
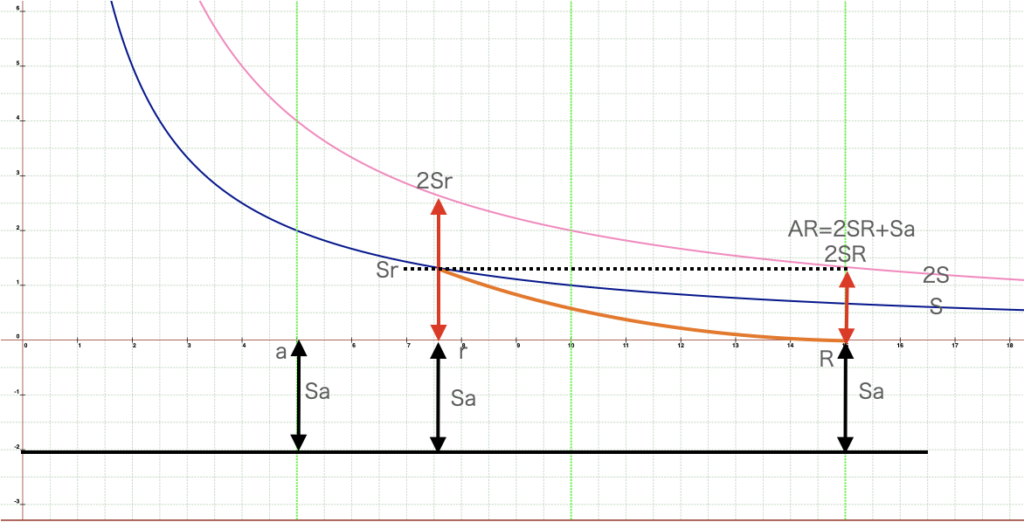
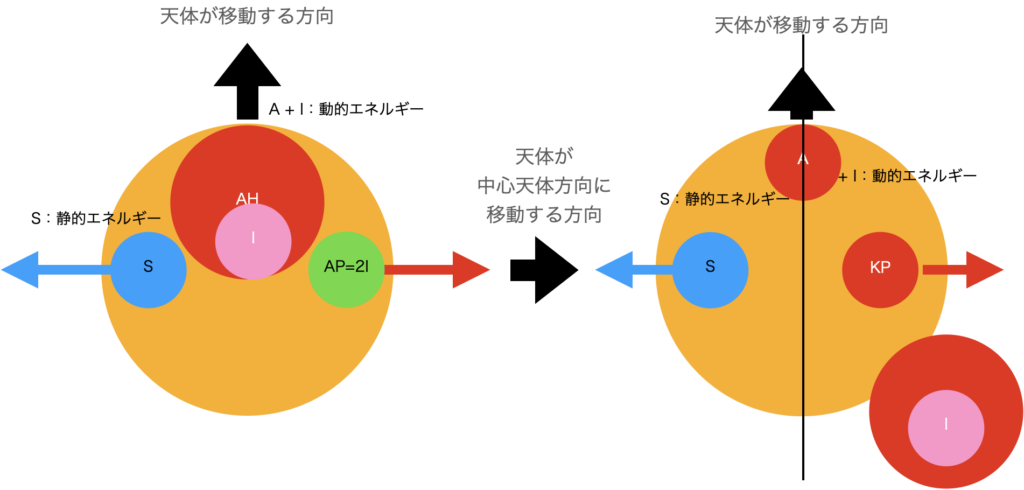
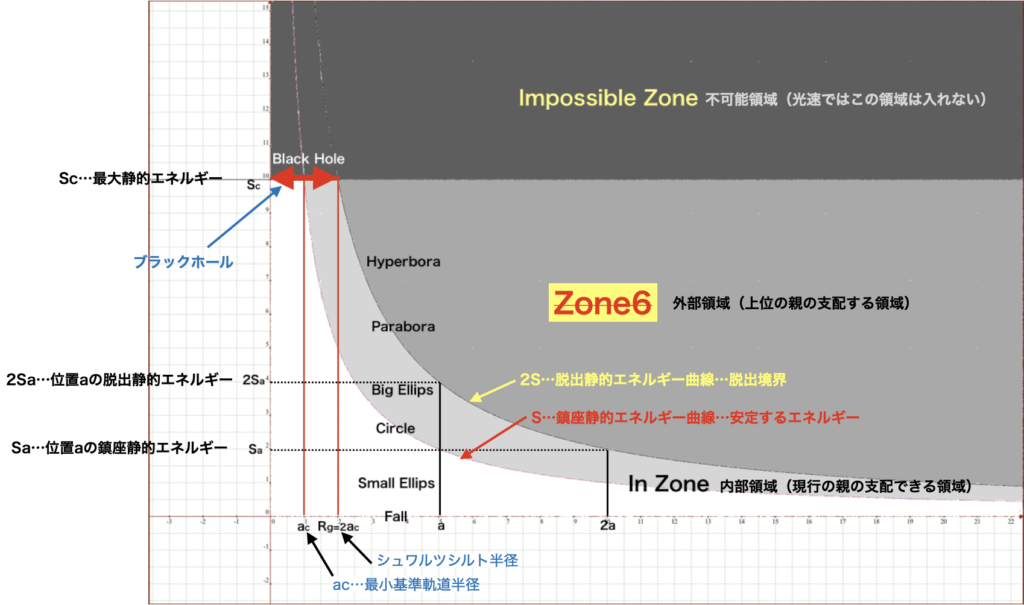
Rの位置で中心星(例えば「木星」)の影響圏に宇宙船が進入したとします。
その時の宇宙船の動的エネルギー(AR)は、
円軌道方向の動的エネルギー(AHR)に静的エネルギーSRの2倍、
木星方向の動的エネルギー(AVR)にSaの静的エネルギーに分割されます。
AVRは移動中中心方向の動的エネルギーのため変化しません。
そして、Rからrに移動する間に動的エネルギーは増加して、
Sr=SRのrの位置で、静的エネルギーSrと増加したエネルギーがバランスします。
その位置rが最近距離になります。
そして、またRの方向に移動しRの位置で影響圏外に移動していきます。
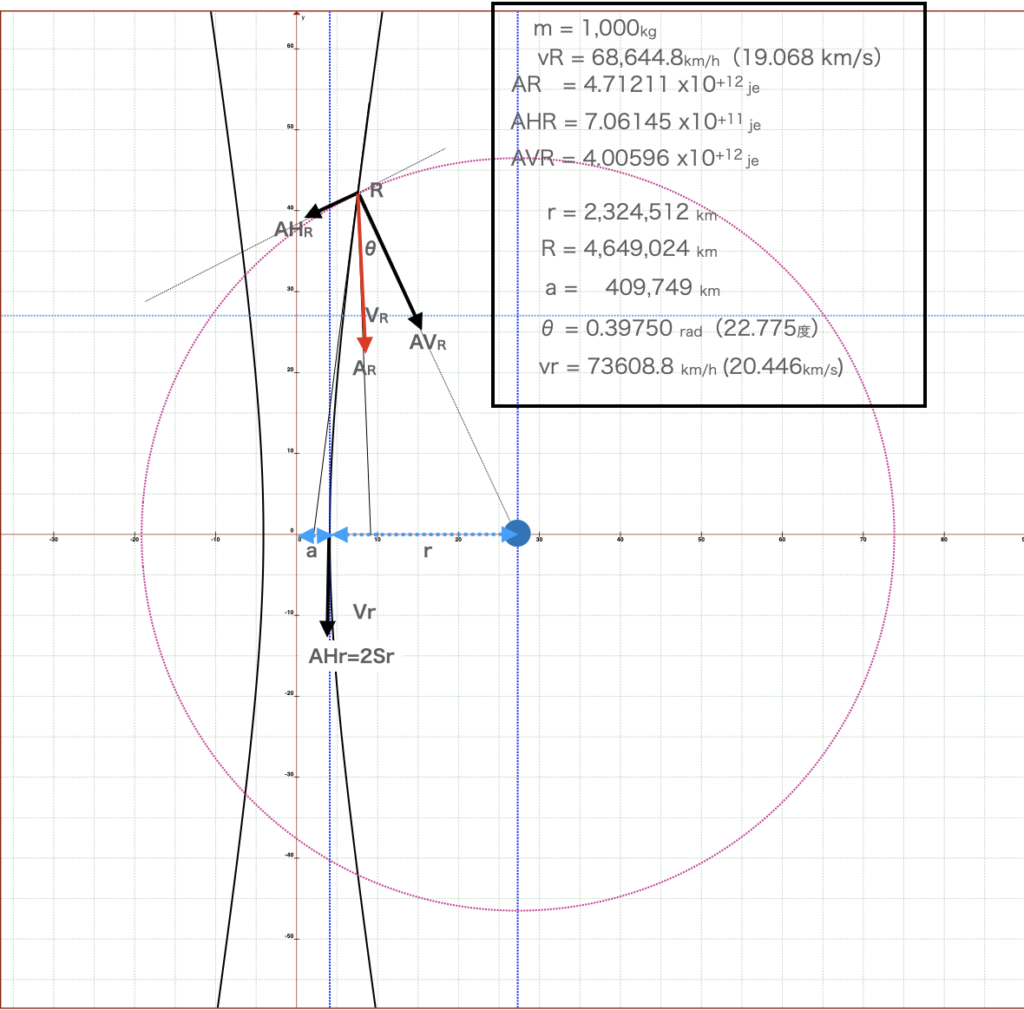
例えば、木星をスイングバイする時の軌道を計算すると、
M:木星の質量(M = 1.89813 x 10+27kg)
m:宇宙船の質量(m = 1.0 x 103kg)
c:光速(c = 1.0792528488 x 10+9km/h)
U:質量光速基準軌道半径変換定数(U = 7.4242576375 x 10-31km/kg)
AR:宇宙船の動的エネルギー(AR=m x vR2… vR = 68,644.8km/h とすると)
AR = 4.71211 x 10+12 kg(km/h)2 とします。
r:最近距離を既知とします、(r = 2,324,512km)
宇宙船の
質量エネルギー:Em = m x c2 (Em = 1.16477 x1021 kg(km/h)2
光速基準軌道半径:ac = U(M + m) (ac = 1.40922 x 10-3km)
EA = Em x ac (EA = 1.64144 10+18 kg・km3・h-2)
Sr = EA / r (Sr = 7.06146 x 10+11 kg(km/h)2 )
SR = Sr/2なので
SR = 3.53072 x 10+11 kg(km/h)2 となり
AR = 2SR + Sa より
Sa = AR – 2SR (Sa = 4.00596 x 10+12 kg(km/h)2 )
になります。
影響圏の距離 R は、
R = EA / SR より
R = 4,649,024 kmになります。(単純に R = 2r で計算してもOK)
進入角度 θは、
θ = tan-1(sqrt(2SR / Sa)) (θ = 0.3975 rad (=22.775度) )になります。
こんな簡単でいいのかって
感じもしますが、
おそらくあっているのではないかと。
実例で検証してみることにします。
ではでは
これについては、すでにアンドリューさんが、証明しているので、いまさらですが、
chat GPTに聴くと、
フェルマーの最終定理(Fermat’s Last Theorem)は、数学の分野である代数幾何学において、フランスの数学者ピエール・ド・フェルマーが提出した定理であり、楕円曲線に関する定理である。この定理は、以下のように述べられる。
xⁿ + yⁿ = zⁿ (n > 2)
ここで、x、y、z、nは正の整数である。この式が成立するようなx、y、z、nの組み合わせは存在しない。
この定理は、フェルマーが17世紀に発表したもので、長い間未解決の問題とされていましたが、1994年にイギリスの数学者アンドリュー・ワイルズによって解決されました。
と回答をもらいました。
「証明を要約して」と頼んだら
フェルマーの最終定理の証明は、1994年にアンドリュー・ワイルズによって提出され、彼自身と共同研究者によって完全な証明が完成しました。
ワイルズらは、代数幾何学と数論の分野である「楕円曲線」と「モジュライ形式」の理論を組み合わせ、新しい数学的手法を開発しました。そして、この手法を用いて、フェルマーの最終定理の証明を行いました。
証明の概略としては、楕円曲線とモジュライ形式の関係性を利用して、フェルマーの最終定理を証明するための新しい数学的手法を開発したことが挙げられます。ワイルズらの手法は、数学の分野において新たな発展をもたらし、多くの研究者たちの関心を集めました。
こんな感じです。
「モジュラー形式」については、
モジュラー形式(Modular forms)は、数学の分野である代数幾何学や数論において、楕円曲線や楕円函数などの一般化された対象として研究されます。
モジュラー形式は、複素平面上の関数であり、一定の性質を満たす関数です。具体的には、以下の性質を持ちます。
これらの性質を満たす関数をモジュラー形式と呼びます。モジュラー形式は、対称性や代数構造に関する性質を持ち、数論や物理学の分野でも応用されます。フェルマーの最終定理の証明においても、モジュラー形式が重要な役割を果たしました。
という回答です。
ここまできて、何のことやらオーラーが出っ放しですが。
そこで、無謀にも、もっと簡単な方法はないのか!と思いこんな方法を思いつきました。
ただ、途中まで、未完成ではありますが。
こんな方法とは
「3次元以上の一片が自然数のN次立方体の表面のN面の合計面積は自然数のN乗にはならない」という予想です。
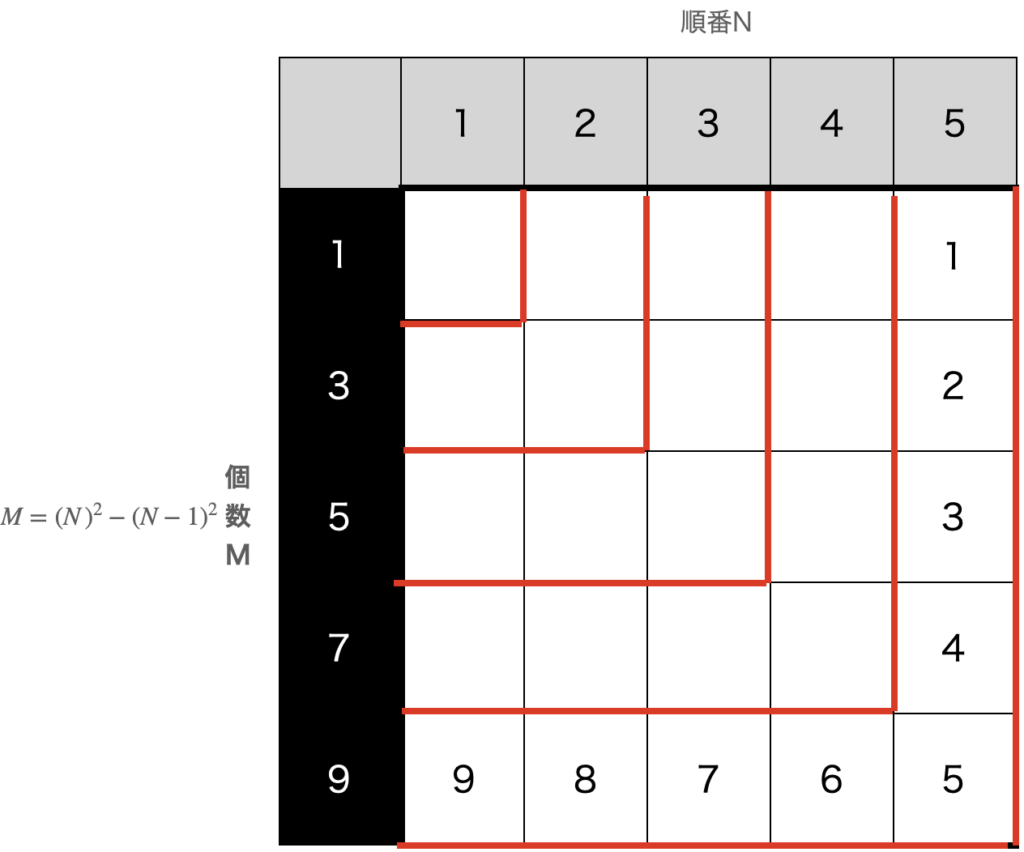
この図はわかりやすいように2次元の図です。
たとえば、N=5の時の面積は9なので、(単位はなし)
ですので、M=9となります。
M = k2
と記述すると、k=3となる自然数kが存在します。
ということで、
5の時に
52 = 25が成立するので、
2面の表面積の合計は自然数のN乗になっています。
3次元の場合3面の表面積は
M = N3 – (N – 1)3
で M=k3
となる自然数kが存在するかということですが、
予想としては存在しないです。
n次元について考えてみると
M =N n – (N – 1)n
で M = kn
となる自然数kが存在しないという予想です。
果たして、
証明できるかどうか、
わかる人がいたら教えてください。
もし、この自然数kが存在しなければ、
そもそも Mは自然数にならないので、
フェルマ=の予想は正解という証明なります。
月は、スーパームーンを代表とする、月と地球の距離が遠かったり近づいたりします。
楕円軌道上を動いています。(国立天文台の地心距離を参考にしてください)
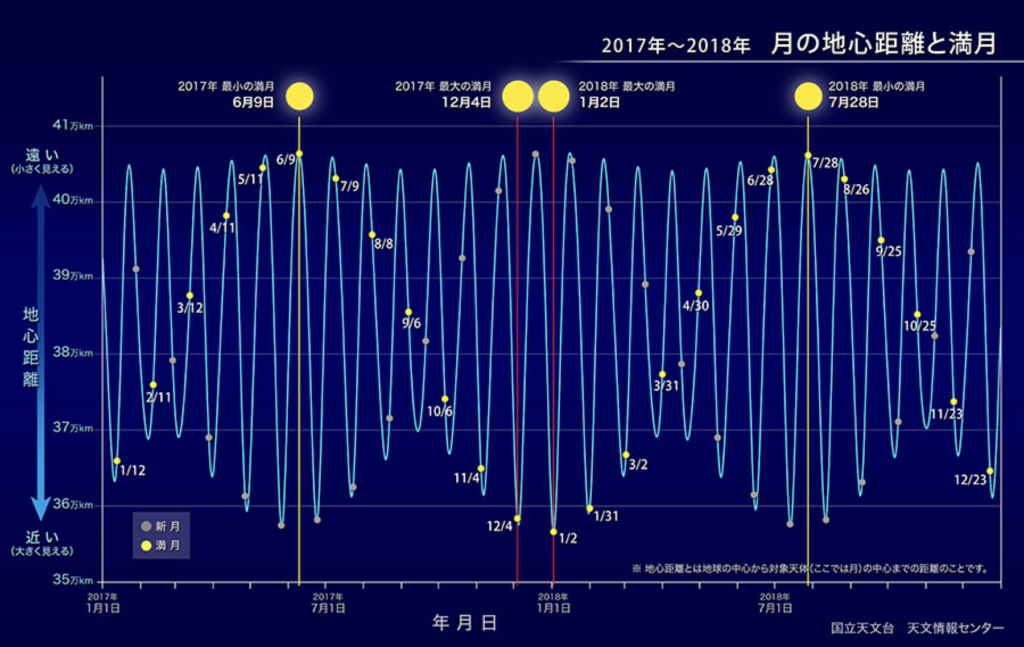
少し説明すると、
地球の中心から月の中心までの距離を「地心距離」といいます、
地心距離については、国立天文台の地心座標で計算できます。
wikiぺディアによると
現在の月の平均軌道半径(基準軌道半径)384,400 kmです。
地球に近い時(ある期間で一番近い時を最近では「スーパームーン」といいます)
近点:354,400 km~370,400kmと幅があります。
地球から一番遠い時
遠点:404,064 km~406,712km
と同様に幅があります。
普通の天体は、近点と遠点が「固定」なのですが、(ケプラーの第一法則「惑星は楕円軌道」になります)
月は遠点と近点が「変動」します。(他にもあるかもしれませんが、月が一番わかりやすい動きをします)
それが月の軌道はエキセントリックと言われる所以です。
月の地心距離のモデリング
国立天文台の理論は、太陽の影響という理論です。
「出差」「二均差」「年差」「中心差」によるということです。
詳しくは、国立天文台の月の公転を参照ください。
太陽の影響と考えると、不確定性の事項が多くて、
自分の中では、納得できなかったので、
次のような、仮定を立ててみました。
月のエキセントリックな軌道の原因は、
このホームページのタイトルになっている、
「Once upon a time the moon impacted twice.」(月は、かつて2度の衝突があった)
というのが、独自理論です。
月へ小惑星が二重衝突したという推論です。
2度衝突するとなぜ、エクセントリックな軌道なる過程を説明します。
エキセントリックな軌道になる過程
2重衝突の距離関係は次の図のようになります。
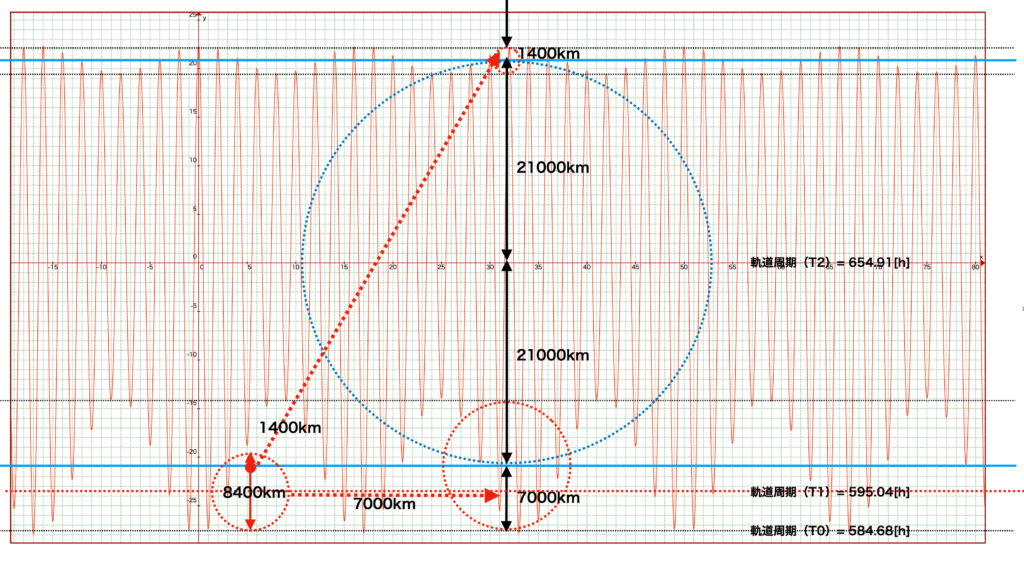
(1)当初
月は基準軌道半径356,400kmで円軌道上を動いていました。
軌道周期(T0)= 584.68(h)になります。
(2)①-1 第1衝突
【衝突位置】
当初の基準軌道356,400kmで月は小天体と衝突しました。
【基準軌道移動】
基準軌道は、360,600km(①-2)になりました。
【振動】
第1衝突により、振幅4,200kmの振動(①-3)する軌道になりました。
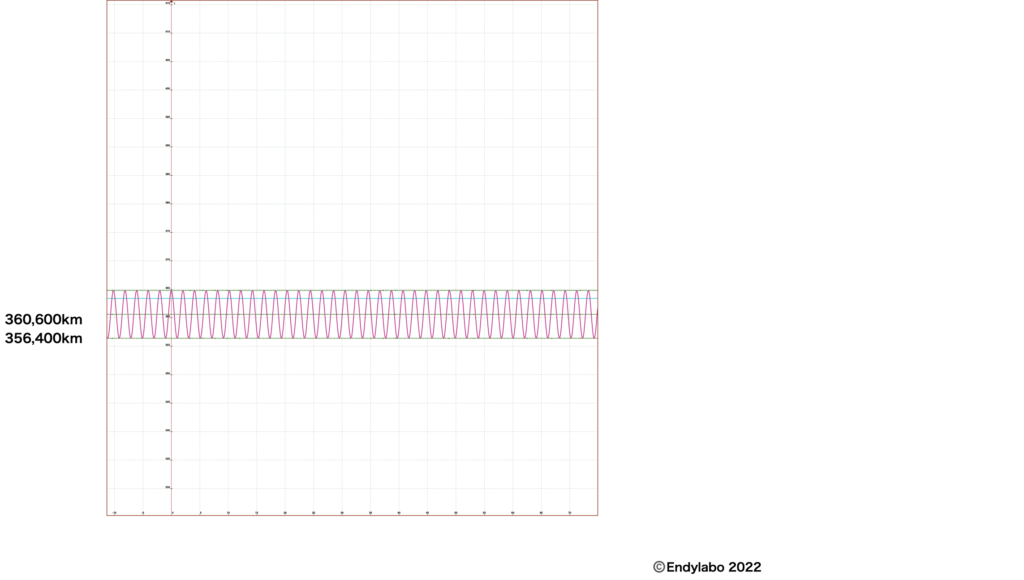
次のような地心距離のグラフになります。
この衝突により、軌道周期(T1)= 595.67(h)になります。
うなり率(β1)= (595.67 – 584.68)/584.68 = 0.01773
となりますが、当初の軌道が円軌道なので、うなりは発生しません
第2衝突により、360,600km を基準軌道として、
振幅4,200kmの振動(①-3)が発生しました。
この振動の近点は、衝突位置の 356,400km
この振動の遠点は、360,600km+4,200km=364,800km
この衝突により、軌道周期(T1)= 591.57(h)になります。
(3)②-1 第2衝突
【衝突位置】
第1衝突後の軌道、楕円軌道(振幅4,200kmの基準軌道(360,600km))の
基準軌道(360,600km)から2,800kmのところ(363,400km)で、
小惑星と月の第2衝突が発生しました。
【基準軌道移動】
現在の基準軌道、363,400km+21,000km(384,400km)(②-2)になりました。
【振動】
第2衝突により、384,400km を基準軌道として、
振幅21,000kmの振動(②-3)が発生しました。
この振動の近点は、衝突位置の 364,400km
この振動の遠点は、384,400km+21,000km=405,000km
この衝突により、軌道周期(T2)= 630.61(h)になります。
【第1衝突の振動】
第1振動は、第2衝突により、
衝突位置363,400kmで、
振動幅8400km(振幅4,200kmの2倍)が
1400km(②-4)と7000km(②-5)の
2つに分裂
1400km(②-4)は、振幅21,000kmの振動(②-3)の遠点で振幅1,400km(振動幅2,800km)
7000km(②-5)は、振幅21,000kmの振動(②-3)の近点で振幅7,000km(振動幅14,000km)
で振動します。
近点と遠点は
近点で一番地球から遠いところが 363,400km + 7,000km = 370,400km
近点で一番地球から近いところが 363,400km – 7,000km = 356,400km
近点で一番地球から遠いところが 363,400km + 7,000km = 370,400km
近点で一番地球から近いところが 363,400km – 7,000km = 356,400km
となります。
【うなり】
当初、軌道周期(T0)だった軌道が、
第1衝突で、軌道周期(T1)になり、
第2衝突で、軌道周期(T2)になったため
うなり率は、T0からT2に変化したので、
うなり率(β2)= (T2-T0) / T0 = 0.12013
となります。
この周期の差が、うなり軌道の原因になります。
β = (654.91 -584.68) / 584.68 = 0.12013
【軌道周期】
当初の軌道周期(T0)= 584.68(h)と
第1衝突後の軌道周期(T1)= 595.04(h)
第2衝突後の軌道周期(T2)= 654.91(h)
の3種類の軌道周期が発生します。
軌道周期(T0)と軌道周期(T2)の比率を
周期率 α = T0 / T2
となります。
α = 584.68 / 630.61 = 0.89275 になります。
【二重衝突地心距離 計算式】
上記の値を利用して、地心距離をグラフにしてみます。
地新居英は、つごの式で表されます。
地心距離(R)= (A1cos(απx) – ΔIp) x cos(βπx) + A2cos(απx) +a2
月の例
(1)基準軌道(当初) a0 = 356400 km
(2)基準軌道(第1衝突後)a1 = 360600 km
(3)基準軌道(第2衝突後)a2 = 384400 km
(4)第1衝突後の振幅 A1 = 4200 km
(5)第2衝突位置 Ip = 7000 km (from a0) ->ΔIp = Ip – A1 = 2800 km
(6)第2衝突後の振幅. A2 = 21000 km
(7)周期率 α = 0.89275
(8)うなり率 β = 0.12013
この値で、グラフにすると
1/1000スケールにしました
y=(4.2cos(pi*x*0.89275)-2.8)cos(pi*x*0.12013)+21cos(pi*x*0.89275)+384.4
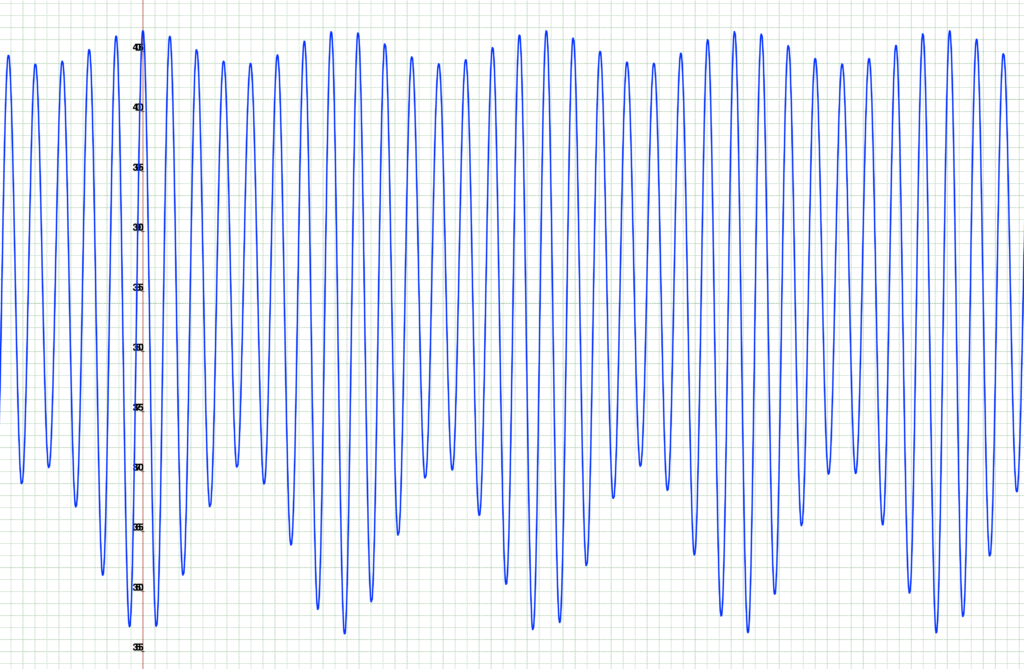
となります。
これは、1番上の『国立天文台の地心距離2017〜2018』のグラフと同じような動きをします。
細かい部分は調整が必要ですが、
理論的には、説明が付きます。
おそらく、他の細かい衝突の影響あり、現在の月軌道に合わせるには、工夫が必要ですが、
大方、この大きな2つの衝突で、現在の軌道が説明できます。