

ついに、大幅にサイトをリニューアルしました。
すこしは、見やすくなったと思います。
(1)宇宙構造
(2)宇宙エネルギー構造
(3)軌道
(4)円軌道
衝突による軌道
衝突エネルギー構造
楕円軌道
総曲線軌道
二重衝突
唸り軌道
質量変位
近点移動
(5)親子構造
ツリー構造
軌道慣性
というメニュー構成です。
基本的に、上から順番に読んでください。
そんな、こんなです。
カテゴリー: 月軌道
楕円軌道と円軌道+単振動の違い
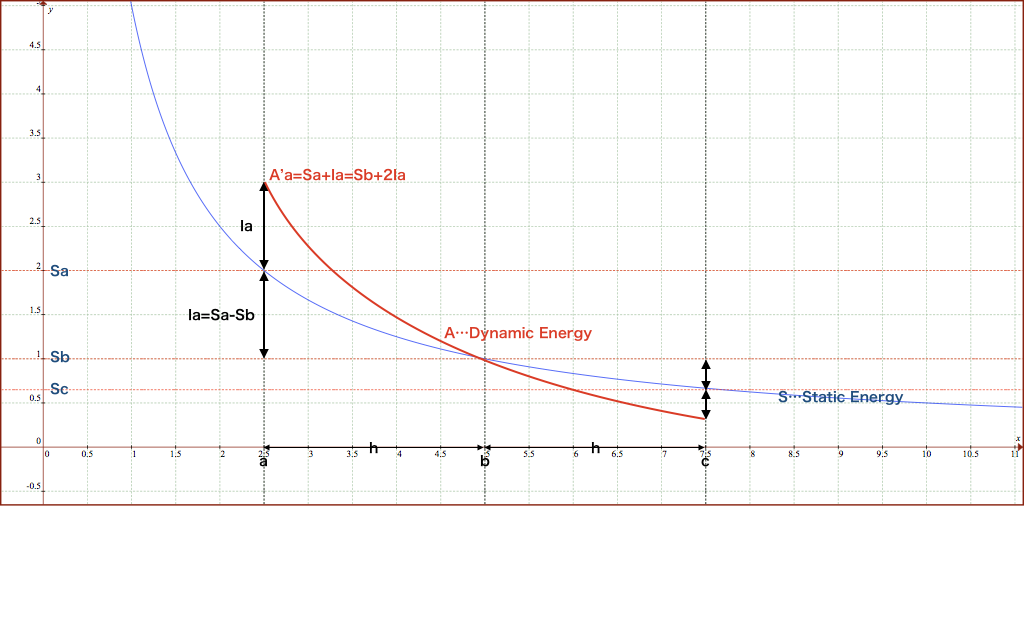
楕円軌道は、円軌道+単振動としています。しかし、厳密にいうと違います。
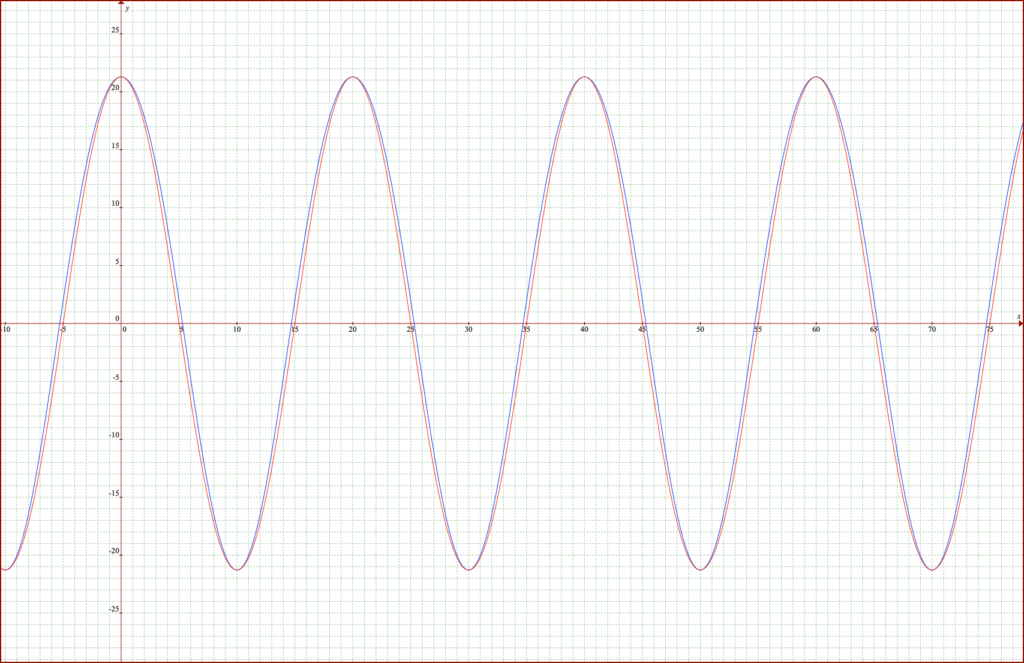
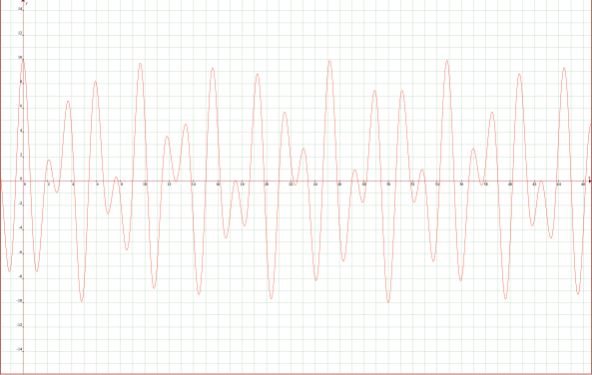
どのくらい違うかというと、火星の軌道でいうとこのくらいです。
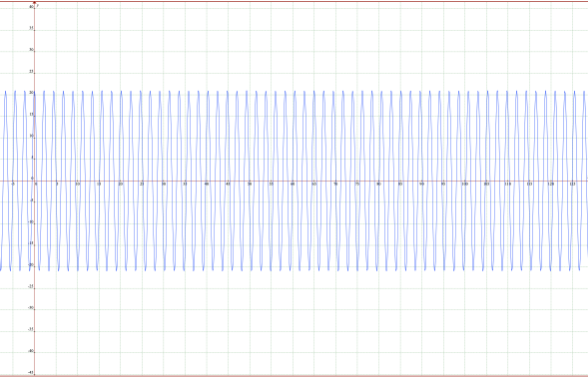
・青線が楕円軌道、
・赤線が円軌道+単振動
になります。
ごくわずかといえばわずか、大きいといえば大きいです。
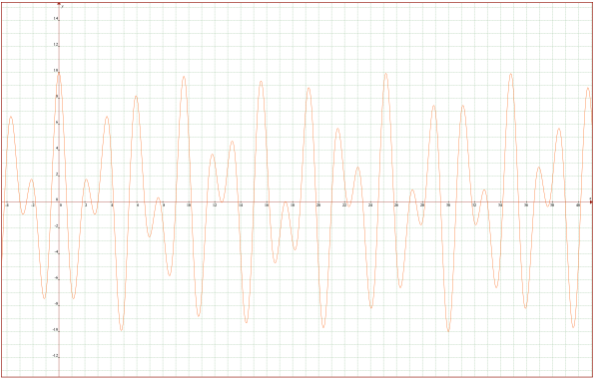
水星の軌道では。
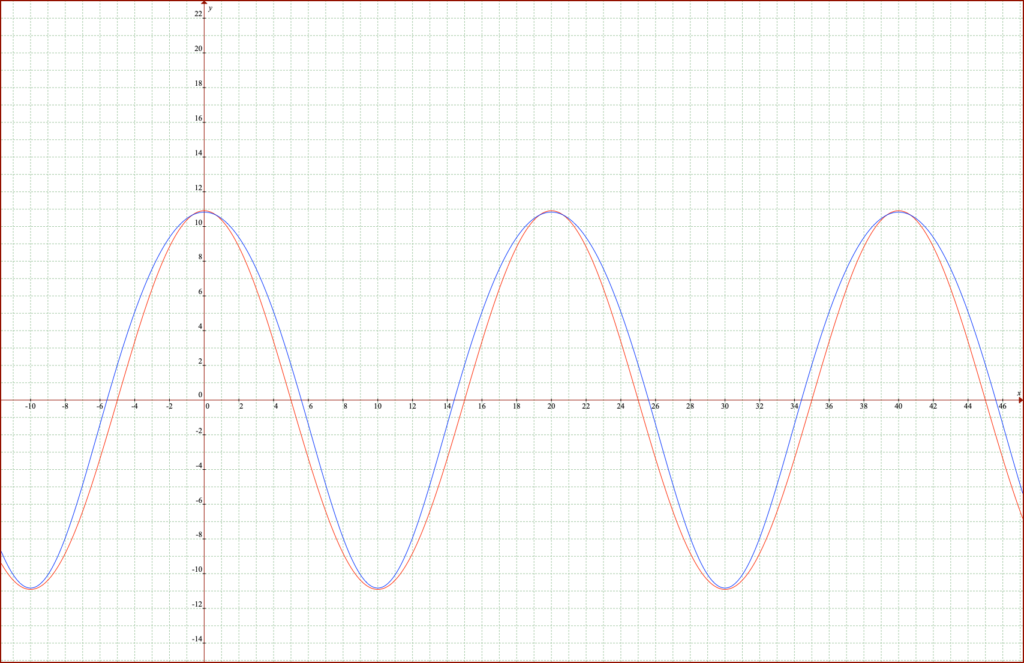
こんな感じです。
だんだん、違いが大きくなってきました。
でも、これくらいならいいかなってところですが。
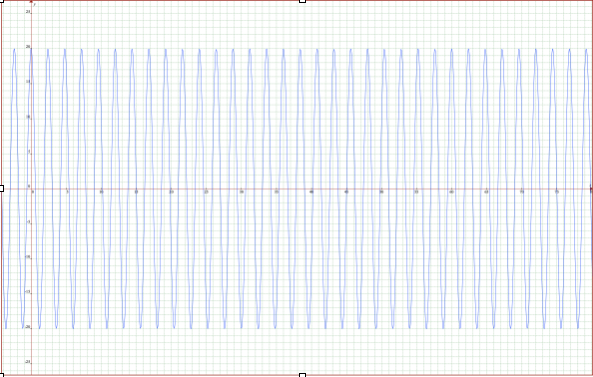
さらに、ハレー彗星のような、長周期の軌道では、
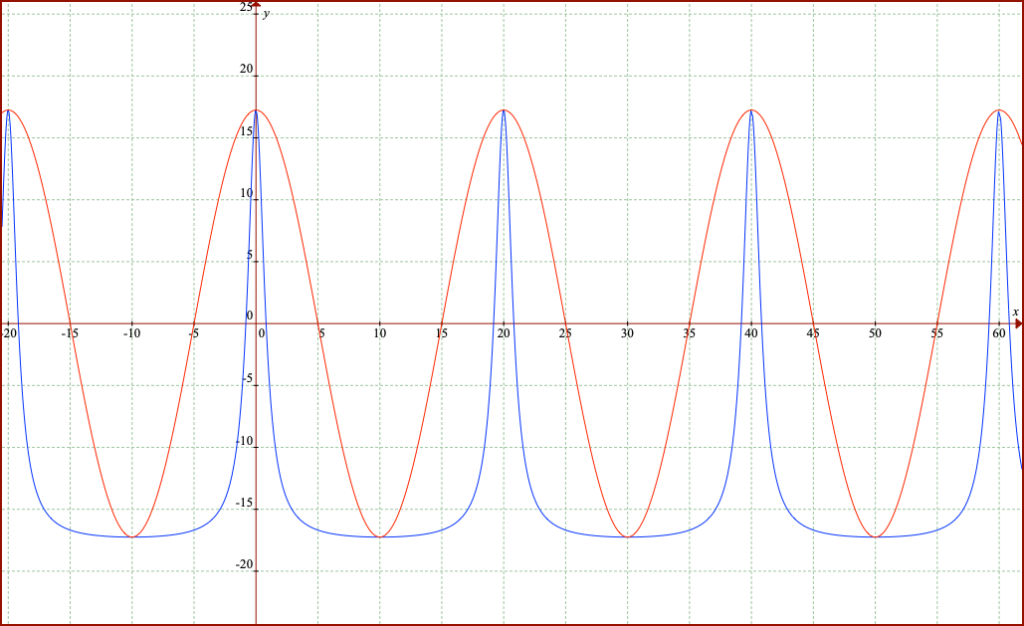
楕円軌道と円軌道+単振動は全く別物です。
ということは、
楕円軌道って円軌道+単振動じゃないじゃないか。ということになります。
その通りです。これで、楕円軌道+単振動の理論は崩壊か〜
いや少し、待ってください。
完全な単振動では、ないけれども、基準軌道(a)を中心に、振幅(f)で振動していることは間違いありません。
そこで、極座標で中心天体から、周回天体までの距離rを長半径a、短半径b、焦点距離f、角度θで表すと、
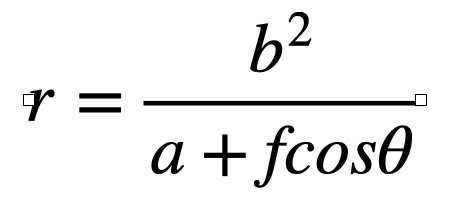
となります。
よくある式は、離心率ε = f / a と 半直弦l=b2/aを使って
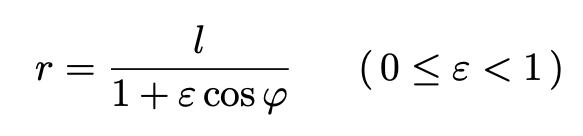
ですが、あまり、離心率と半直弦が好きでないので、
a,b,fの式にしました。
好き嫌いかよってことですが、好き嫌いです。(笑)
本当は、a+fcosθが、円+単振動になっているからです。
これは、曲座標(r)は、普通の単振動ではありませんが、周期は単振動と同じです。
ふつうの単振動と違う理由は、静的エネルギーの大きさが、距離に反比例して変化するからです。
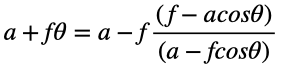
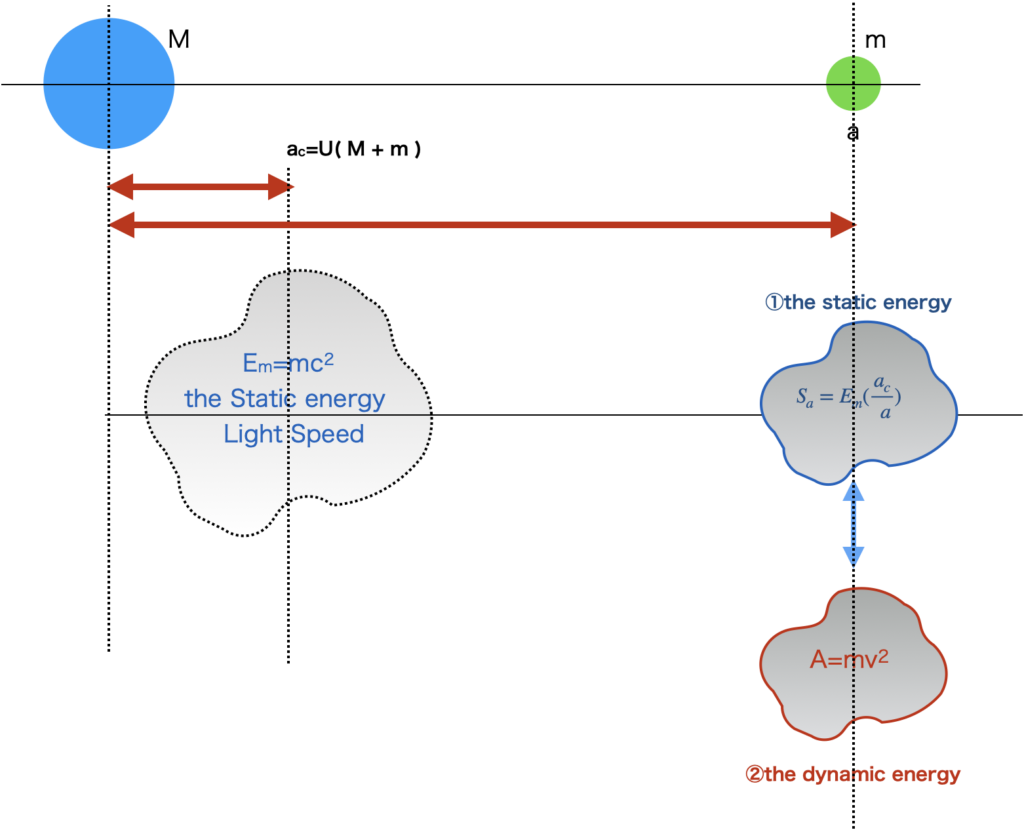
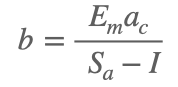
次の図をみてください。
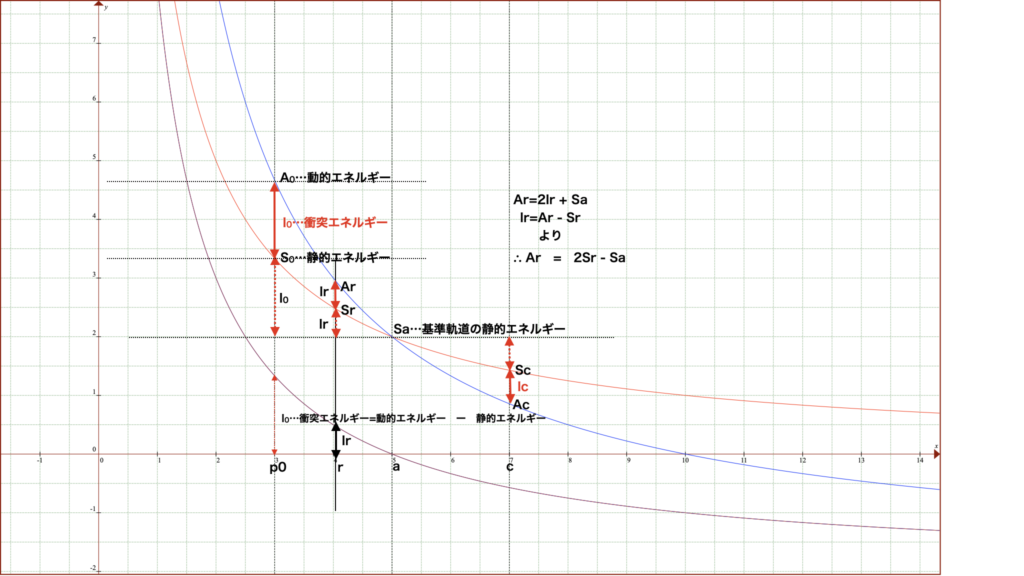
位置(P0)の衝突で増えた衝突エネルギー(I0)は、
動的エネルギー(A0)と静的エネルギー(S0)の差(A0 ーS0)になります。
そして、衝突した時の衝突エネルギー(l)=0になる点が、周回天体の鎮座する位置(a)です。
例えば、任意の位置(r)では、動的エネルギー(Ar)は、図より、
Ar = 2Sr -Sa
と表されます。
これは、衝突エネルギーと同じ大きさの反対のエネルギーが
(これは、力の作用反作用を模して作用反エネルギーとでもいいましょうか)
安定する場所(静的エネルギー)に対して、働くからです。(言い切る)
そして、動的エネルギーは、近点(Po)で最大で速度が速く、
遠点(c)で最小で速度は遅くなります。
このエネルギーの変化によって、周回天体は、楕円軌道上を動くことになります。
これは、なんとかして、周回天体は居心地のいい場所に行こうとするからです。(再び言い切る)
そこで、楕円の極座標(r)を円軌道+変形単振動で表してみることにします。
変形単振動は。中心天体からの距離で変化する、
静的エネルギーの差を考慮した単振動という意味です。(本来の単振動ではないけど)
楕円軌道の極座標
の式から、角度θによる、振幅(fθ)を算出したいと思います。
ここで、この式はθ=0の時に近点になるので、
θ=0の時に遠点にしたいので、(個人的理由なので、このままでもOKです)
分母をa-fcosθにします。
振幅(fθ)は、中心星から周回天体までの距離(r) から基準軌道(a)を差し引いた(r – a)いいので、
となります。(計算してみてください。b2 = a2 – f2を使います)
になり、円軌道と周期的に変化する振動になります。
これが、下図のように、楕円軌道の極座標になります。
結論
このように、周回天体は、鎮座する位置を求め、
静的エネルギーとバランスをとりながら、楕円軌道上を動きます。
ということです。(これはあくまでも個人的意見です。)
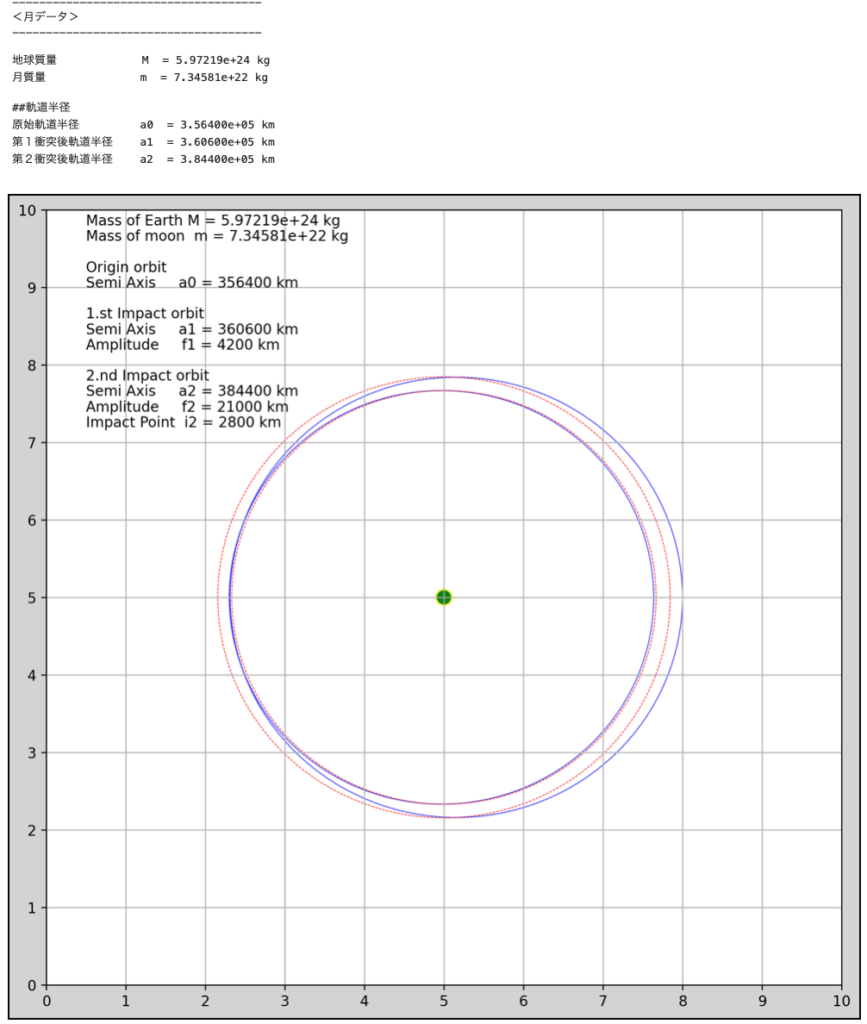
月軌道のプログラム作ってみた

まあ、ぼちぼち色々なプログラムを作っていますが、最終的に月軌道のプログラムを作りたく、日々悪戦苦闘しているわけです。まあ、全然作りかけのプログラムですが、動作するので、V1.0として掲載してみます。
とりあえず、2回の衝突軌道と地心距離のグラフを作ってみましたが、ほんととりあえずです。
月軌道プログラム(Python)
出力結果
双曲線起動-脱出系 プログラムを作ってみた
ダウンロードして使ってみてください。
次のような結果が表示されます
光速 c = 1079252848.8 km/h , 宇宙エネルギー定数 U = 7.42426e-31 km/kg 太陽質量 M = 1.98910e+30 kg 地球質量 m = 5.97219e+24 kg 宇宙船質量 mp = 1.00000e+03 kg 太陽-地球間距離 Re = 1.49598e+08 km 地球半径 r = 6.37814e+03 km <脱出(近点) r> 距離 rp = 6.63904e+03 km 速度 vX = 1.22939e+01 km/h 角度 θ = 2.69726e+01 度 速度(基準軌道) vHr = 1.09566e+01 km/h 速度(中心天体) vVr = 5.57606e+00 km/h エネ(基準軌道) AHr = 1.55581e+12 je エネ(中心天体) AVr = 4.02958e+11 je <脱出(半交軸) a> 距離 a = 1.28166e+04 km 速度 va = 9.65802e+00 km/h 角度 θa = 3.52644e+01 度 エネ(基準軌道) AHa = 8.05916e+11 je エネ(中心天体) AVa = 4.02958e+11 je 速度(基準軌道) vHa = 7.88574e+00 km/h 速度(中心天体) vVa = 5.57606e+00 km/h <脱出(影響圏半径) R> 距離 R = 2.56332e+04 km 速度 vR = 7.88574e+00 km/h 角度 θR = 4.50000e+01 度 エネ(基準軌道) AHR = 4.02958e+11 je エネ(中心天体) AVR = 4.02958e+11 je/h 速度(基準軌道) vHR = 5.57606e+00 km/h 速度(中心天体) vVR = 5.57606e+00 km/h
第三宇宙速度の怪!?

昔から、第三宇宙速度については、よくわからなかった。のだ。
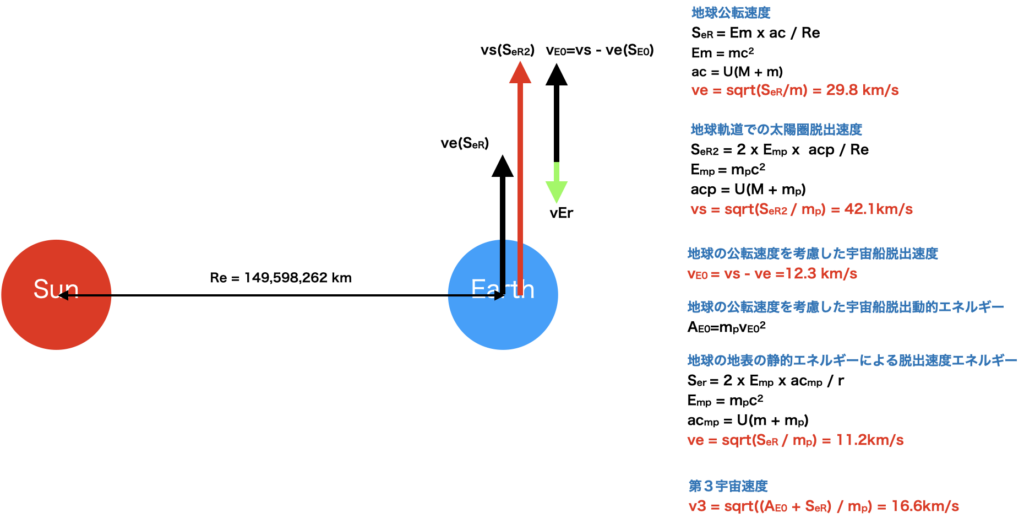
一般的に知られている解き方は次の通りです。
(1)地球の公転軌道付近における太陽からの脱出速度 vs=42.1km/s
(2)地球の公転速度 ve=29.8km/s
(3)地球からロケットを打ち上げる場合、地球の公転速度が加算されるので、ロケットは(1)と(2)の差し引いた速度で打ち上げればいいので vE0 = vs – ve = 12.3 km/s
(4)ロケットは地球の重力を振り切る必要があるので、地表の重力を打ち消した後(3)になればいいので
地球を振り切る速度 v3 = 16.7 km/s
になります。
というのが答えなのですが。
これって、どうやって打ち上げたことを想定しているのかがよく分からんのですわ。
(1)、(2)は軌道方向に打ち上げたことを想定していますが、(3)は軌道方向垂直にうちあげたことを想定しているのではないかと思うのです。
えっ!どういうことだよ。打ち上げ状況が違うんじゃないの?
って思うわけです。
軌道方向に打ち上げたとすれば、(3)までで太陽に対して、地球軌道の静的エネルギーの2倍以上ならば、放物線軌道または双曲線軌道になるので、太陽の影響圏を抜けることになります。
真上に打ち上げるということは、
無限遠方で速度があればいいから、(無限遠方は使いたくないけど、とりあえず説明のために)
打ち上げ時のロケットの動的エネルギー から 地表の静的エネルギーの2倍を引いた値がゼロより大きくなれば、ロケットは地球に戻ってきません。ということは、太陽圏に入るということになります。
この場合、太陽から見ると、地球の公転速度と地球から真上に上げた速度できる角度の方向に打ち上げられたことになります。
θ=tan-1(真上に打ち上げた速度/地球の公転速度)になります。
しかし、これでは地球を脱出できないので、
θ=tan-1(真上に打ち上げた速度/地球を振り切る速度)
すなわちですね、この真上に打ち上げた速度と地球を振り切る速度の合成した速度が太陽件脱出速度と言いたいわけですかね。
うーん。よく分からないぞ。
ちゃんと計算してみよっと。
ちゃんと計算してみたら分かった
しかし、計算する前に、地球の公転軌道における太陽からの脱出速度 42.1 km/s 以上で (対太陽速度)で軌道進行方向に打ち出せば、太陽が中心天体とした双曲線軌道になるはずです。
あっ!自分の想像していた打ち上げと違うんだ。
こういう感じだった。
(0)基本データ
c = 1.07925E+9 km/h 光速
U = 7.42426E-31 km/kg 宇宙エネルギー定数
M = 1.9891E+30 kg 太陽質量
m = 5.97219E+24 kg 地球質量
mp = 1,000 kg 宇宙船質量
Re = 149,598,262 km 太陽ー地球館距離
r = 6,378.137 km 地球半径
(1)地球公転速度 29.8km/s
SER = Em x ac / Re = 6.86696E+34 je 静的エネルギー
Em = m x c2 = 6.95633e+42 je 質量エネルギー
ac =U(M+m) = 1.47676 km 光速時基準軌道半径
ve =sqrt(SER / mp) = 107,229.77817 km/h(29.78605 km/s)地球公転速度
(2)地球起動での太陽圏脱出速度 42.1 km/s
SER2 = 2 x Emp x acp / Re =2.29964E+13 静的エネルギー
Emp = mp x c2 = 1.16479E+21 je 質量エネルギー
acp = U(m + mp) = 1.47676 km 光速時基準軌道半径
vs = sqrt( SER2 / mp ) = 151,645.57893 km/h 太陽圏脱出速度
(3)地球の公転速度を考慮した脱出速度 12.3 km/s
vE0 = vs – ve = 44,415.8 km/h( 12.3 km/s)
AE0 = mp x vE02 = 1.97276E+12 je 公転軌道速度を考慮した脱出動的エネルギー
(4)地球の地表の静的エネルギーの脱出速度 11.2 km/s
Ser = 2 x Emp x acmp / Rr = 1.61946E+12 je 静的エネルギー
acmp = U × ( m + mp ) = 4.43391E-6 km 光速時基準軌道半径
vEr = sqrt( Ser / mp ) = 40,242.46778 km/h(11.2 km/s)
(5)第3宇宙速度 16.7 km/s
v3 = sqrt( ( AE0 + Ser ) / mp) = 59,935.1 km/h(16.7 km/h)
よし、理解!
ついにHP立ち上げ一周年記念ディスる

HPを立ち上げて、一年たちました。
おめでとう!!パチパチ
と言っても、広報を全くせずにいるので、統計は地を這いずっているような状態ですが。
これまでに、書いたブログは40ブログで月平均3から4本と言うところです。
内容は、宇宙のことが多いので、読者は限られてしまいますが。さらに式が多くてとても読む気にならん。と言うご意見もあります。ごもっとも。
あのホーキング博士が言っていた。式が多い本は売れないと。結局、専門家でなくても読める形にしないと、広まらんぞお。とおっしゃっていました。
しかし、段々物忘れがひどくなってきている昨今(生まれつきかもしれんが)何かに残しておかねば、忘れてしまうのですよ。ノート代りかな。
自分が作った「調和理論」は引力や重力を否定する理論で、これがまた受けない。だって全世界の人口76億人のうち、2、3人しかそんなこと考えていないと思う。全くニッチな理論です、
でも、コペルニクスの地動説のように、そのうちに受けいれられる時がくる日を信じて、勤しんでいるわけです。
調和理論
「調和理論」の発想の発端は。「猫のチャーが坊さんの座布団に鎮座した」ことを発端にしています。チャーにとって坊さんの座布団の上が一番気持ちいいのでしょう。チャーを月に置き換えてみたら、月は今居るところが一番居心地がいいのではないかと。とすると、もしかして、月は自分の意思で今の軌道を選んでいるのではないかと思ったわけで。巷に溢れている、自走するロボットのように、そう、丸いルンバのように。そう思っただけで、ルンバが月に見えてくる。ルンバは最後は充電器に自分で戻ります。すごいなあ。時々掃除を挫折して、赤ランプを点滅して止まっていることもありますが。
月は外部の力で動いているのではなくて、自分自身で動いて今の場所に居るとすれば、どんなメカニズムなんだろうと考えてみたわけです。
それを考えてみたときに、全ての力はバランスするはずだ。と言うことを思い出した。あの作用反作用の法則です。物を紐をつけて振り回すと、物自体は遠心力と向心力でバランスします。しかし、引っ張っている人は、物を回した時の紐の引っ張る力と人を止めておく靴の摩擦力がバランスして、人は止まって回すことができます。
しかし、宇宙空間では、靴の摩擦力はないので。例えば、地球と月が版引力という紐で繋がっているとすると、いつしか地球と月はぶつかるはずです。確か、宇宙ステーション(ISS)で野口さんがタオルかなんかで綱引きをした映像がありました。結果は、二人で引っ張ると二人ともぶつかっていました。
ニュートンの万有引力は地球が月に引っ張られ、地球が止まっていられるところが曖昧なんです。ニュートンも分かっていたようです。
そこで
そこで、考えたのが、ルンバちゃん方式。月が自走するいうことです。自走ってどうやってと聞きたいと思いますので、簡単に説明しましょう。
月は居心地の良いところは決まっています。だから、そこにいればお茶を飲んでボーとしていられます。そこは全ての力がゼロのところです。(一般的には無重力と呼んでいますが)しかし、力で考えると地球を止める力がないので、地球が近づいてきてしまいます。また、力で考えると、地球から月へ力がどの速度で伝わるのかなんてことも考えなくてはならなくなります。
そこで、月自身が保持していて、その3つのエネルギーのバランスで月が移動すると言う方法を考えました。
まず、一つめは、月自体のエネルギーです。宇宙空間において、物体が存在すると宇宙空間とのエネルギーとバランスする「質量エネルギー」というものです。それは、宇宙空間と月自身が存在することでバランスするエネルギーです。物体には、宇宙空間から供給されます。その分宇宙空間からエネルギーが減ります。この質量エネルギーは、アインシュタインの有名な誰でも知っている、エネルギーと質量と交換できる式E=mc2になります。(アッ式を描いてしまった。)
このエネルギーは、地球と月の場合、地球(大きなエネルギーをもった物体)から月(小さいエネルギーを持った物体)に流れます。まあ供給されますって感じです。静的エネルギーの最大は、月の質量エネルギーです。質量エネルギーが最大の時の距離は、光速時の軌道半径になります。ブラックホールの半径になります。このエネルギーは、2物体間の距離に反比例して段々小さくなります。
これを静的な距離によって決まるので「静的エネルギー」と呼ぶことにしました。この静的エネルギーが供給されると、月は地球の方に落ちていってしまいます。
そこで、物体が持っているもう一つのエネルギーは、運動すると発生するエネルギーです。速度の2乗に比例して大きくなります。
これは、速度によって決まるので、「動的エネルギー」と呼ぶことにしました。
この静的エネルギーと動的エネルギーがバランスする位置が、月にとっての坊さんの座布団になります。
このエネルギーは、月自身が保有していています。
もしもバランスが崩れたら
座布団の位置が移動します。おー座布団が移動するんですよ。猫のチャーならすぐ座布団に座りにいくだろうな。月も同じなんだよな。座布団を追って、月がトコトコ動くんですよ。
そう、座布団はどんな場合も、月が一番居心地の良い場所に移動します。月はその座布団に向かって、動的エネルギーを調整します。例えばバランスしている位置の動的エネルギーより I だけ動的エネルギーが増えたとしましょう。そうすると、今いる場所の座布団の位置の静的エネルギーより、I 減った静的エネルギーの位置が居心地がいい場所になります。そしてその位置でバランスするように月が移動します。
これが調和理論の一つです。
とりあえず、今日はこの辺で。
では
ケプラーの法則と万有引力の関係って

プリンキピアの中で、ニュートンは、太陽を公転する地球の運動や木星の衛星の運動を統一して説明することを試みました。
ケプラーの法則に運動方程式を適用することで、万有引力の法則が成立することを発見しました。
これは、『2つの物体の間には、物体の質量に比例し、2物体間の距離の2乗に反比例する引力が作用する』と見なす法則です。
力そのものは、瞬時に伝わると考えました。(これってどうなのかと思いますが。宇宙で一番早い速度は光速ではなかったかと。そして、力が宇宙空間を伝わるってどう言うことですか〜、わからんなあ。まあそれはそれとして)
式で表すと、万有引力の大きさFは、物体の質量を M,m、物体間の距離をrとして、
と表されます。実際の符号はマイナスですが。
Gは万有引力定数で

となります。
万有なので、木から落ちるりんごにもこの式は適用できるはずで。
地球の質量をM、リンゴの質量を m、地球の半径を rとすれば、万有引力の大きさは、 であり、
リンゴの運動方程式は、加速度を gとして、
となる。
すなわち、地球重力による加速度は
となり、すべての物質について同じ値になる。mはMに比べてすごく小さいため、足し算の部分は影響が少ないため省いた。厳密にいえば、質量mの大きさによって異な利ますが。
これはガリレオの言っている「重さに関係なく同時に落ちる」と言ってることの証明になります。
上記の式から地球の質量を求めることができ、地球表面では重力加速度は約9.8m/s2であり、地球の半径は約6400kmであるので、
がわかる。
ここで、遠心力は、角速度ωと起動速度vにより
になります。
遠心力=万有引力になるので、、
軌道速度vは
これで、惑星の周期を計算すると、大体あっていたという話です。
ケプラーの第3法則は、これから簡単に導かれます。
より、T2 = kr3(kは定数)になり、ケプラーの第三者法則が成り立ちます。
ケプラーの第二法則も説明しているのですが、今日はこの辺で。
では
エネルギーは継承されるって

前回のブログで、太陽系はツリー構造だから3体問題は発生しないと載せたら、どうしてやねん?という質問があった。このサイトを隅から隅まで読んで貰えばわかるが、そんな暇人はそうはいない。まあー、簡略化されて書いているから、詳しいことがわからんという人が多いと思う。そこで、少し簡単に説明しようかなと思います。
そもそも3体問題ってなんだってことですが。これはニュートンの万有引力が発端で、「万有」つまり全てのものがお互いに、「引力」引っ張りあっている。ということです。
「引っ張りあっている。」の部分は、2つの物体、例えば、地球と蜜柑いやニュートンは確か林檎だった。地球と月、地球と林檎、林檎と月という関係で引っ張りあっている場合は2体問題と言います。ここで、「万有」とすると全てのものが引っ張りあっているということになります。だから、地球と月と林檎がお互いにどのように引っ張りあっているかというのを考えるのが3体問題です。実は、万有なので、本当は、3体以外の全部が引っ張りあっているということなので、多体問題です。その一つが3体問題になります。
3体問題は、一般解がありません。特殊なケースは論文が発表されているのを観ましたが。ましてや多体問題の解なんぞ無理難題です。
それは、天体同士がネットワーク構造でつながっていると、ニュートンが解釈したからです。もし全ての天体が引力でバランス取れているとしましょう。一つの引力の大きさが変わった場合、他の引力の力はどうなるでしょうか?わからんというのが回答です。
しかしラプラス共鳴のところでも少し述べましたが、実は、太陽系の惑星は2体問題の解として安定しています。ラプラスはニュートンの法則が正しいとして、補正で軌道共鳴を考えました。
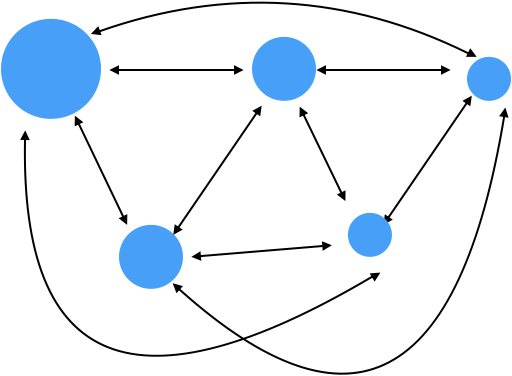
ツリー構造
そこで、そもそもネットワーク構造ではないんじゃねーというのが、私の考えたツリー構造です。太陽系のツリー構造は。
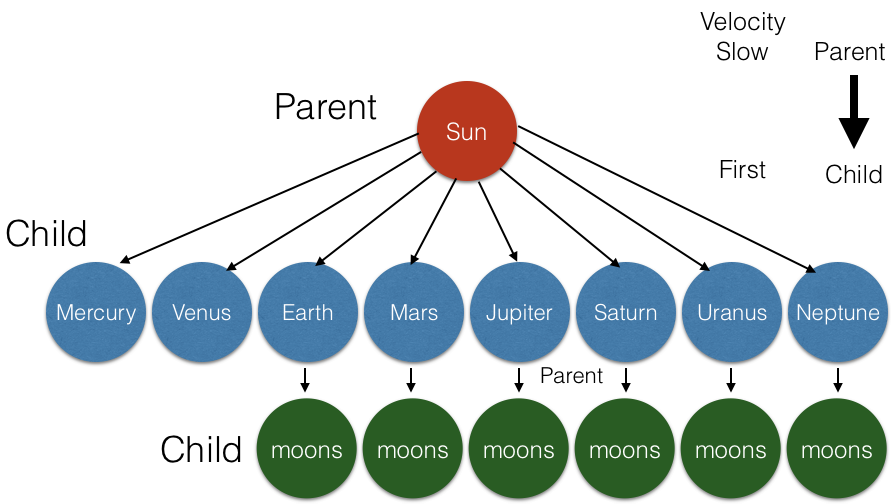
こんな感じになります。
全てを2体問題で考えます。例えば、太陽と地球と月の関係では、太陽と地球、地球と月という関係しかありません。そして、太陽のエネルギー(A)(ここではざっくりエネルギーと言っておく)と地球だけのエネルギー(B)と月だけのエネルギー(C)があったとします。地球エネルギー(B)は太陽のエネルギー(A)継承(受け渡される)されA+B。そして、太陽のエネルギー(A)を継承された地球のエネルギー(B)A+Bが月(C)に継承されA+B+Cになります。という考え方です。
だから、木星のエネルギーは、地球に継承されません。力で言うと摂動(他の多数の惑星の引力によっ値からが影響され軌道が変わること)が起きません。これはシンプルな考えだと自負します。があっているかどうかは、研究調査しないとわかりません。少なくとも変な補正は必要ありません。
もっといえば、天の川銀河の中心エネルギーが太陽に継承されているはずです。だから地球の月は相当大きなエネルギーを保持しているはずです。
この継承されるエネルギーは、運動と方向を左右するエネルギーなので「動的エネルギ=(Dynamic Energy)」と呼ぶことにしました。このエネルギーが継承されることで、太陽の動く方向に惑星は全員動き、惑星の衛星は、太陽が動く方向+惑星が動く方向に追随して動くことになると言う考え方です。
これはトラックの荷台の上のトラックとか、亀の上の亀とかに似ているとか思ったりします。
では
非重力理論からの宇宙構造
前ブログで、月軌道から「非重力理論」もとい、「重力ないんじゃねえ」の説明をしました。
要するに、エキセントリックな月軌道は、太陽の影響でなくて、二重衝突で説明できるから、あえて重力(ニアー引力)がなくても、エキセントリック軌道になるよ。と言うことでした。では、宇宙構造がどのようになっているかを、どのように説明したらいいかと言うことで、ケプラーの法則を見直してみることにしました。
宇宙構造
ケプラーの第3法則は、惑星の公転周期(T)の2乗は、軌道長半径(a)の3乗に比例する。です。
公転周期Tは軌道平均速度vより
より

となります。また、vが光速cの時の基準軌道半径をacとすると

が成り立ちます。
この2つの式の比をとると
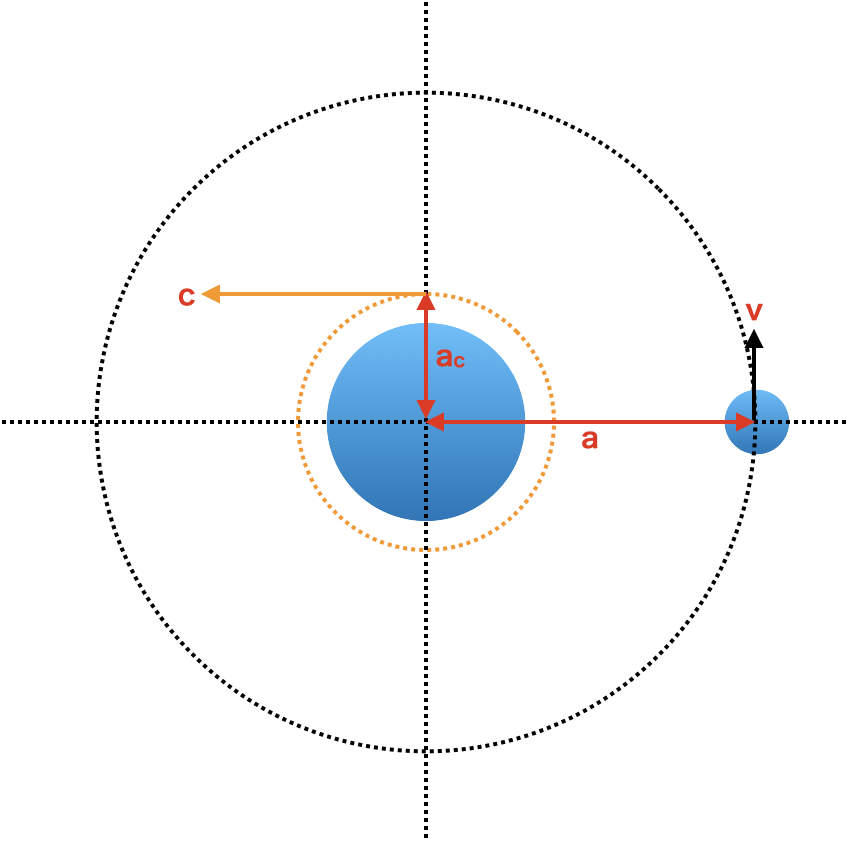
となります。これはケプラーの第3法則の変形です。この式は実際の宇宙構造として扱えます。これを「宇宙構造」と呼ぶことにします。
宇宙エネルギー構造
宇宙構造の両辺に、アインシュタインの質量エネルギー変換式を質量エネルギーと呼ぶことにします。
を両辺にかけると、宇宙構造の両辺がエネルギーになり、両辺のエネルギーがバランスすることになります。
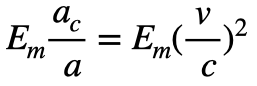
この式を「宇宙エネルギー構造」と呼ぶことにします。左式は距離の比なので、「静的エネルギー」と呼ぶことにします。
と表します。
右式は速度の比なので、「動的エネルギー」と呼ぶことにします。そして、動的エネルギーは
と表します。
Sa=Aaの時バランスして、円軌道になります。
この時のaを「基準軌道半径」と呼びます。
光速時の基準軌道半径(ac)
ところで、光速時の基準軌道半径acはどのように表されるでしょうか。
ここで、ニュートンの万有引力の法則を利用します。万有引力が無いと言っておきながら、それを使うのかと言うことですが。
実際ニュートンの万有引力の法則は、通常の速度範囲なら正しいことが証明されています。アインシュタインの重力場とか考えなければですが。とりあえず、ニュートンの万有引力が正しいとすると、ニュートンの万有引力エネルギー変換した、
は、距離によって決まるので「静的エネルギー(Sa)」と同値になります。

Em=mc2より、
となります。Gは万有引力定数になります。
と置いて、Uを宇宙エネルギー定数と呼ぶことにします。(U=7.42426e-31Km/Kg)…1Kgあたりの基準軌道半径(km)

と表します。
従って、光速時の基準軌道半径acは、2天体の質量の和で決まります。
楕円軌道
楕円軌道は、「円軌道」+「単振動」です。
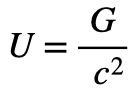
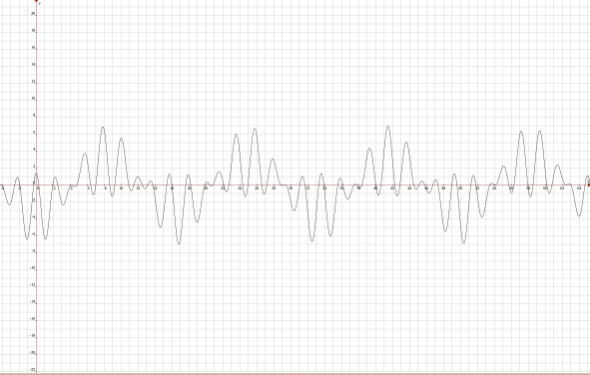
楕円軌道の原因の一つは、天体同士の衝突です。地心座標をグラフで描くと
「円軌道」の地心座標は、fs=b
「単振動」の地心座標は、fA=Acos(ωt)
楕円軌道の地心座標fは、f = fs+fA = b + Acos(ωt) (下グラフの黒線)になります。
衝突後の軌道ををみてみると、元基準軌道のある位置で衝突が発生すると、静的エネルギーがバランスする、現基準軌道に基準軌道が移ります。その為、現基準軌道を中心に振幅fの振動が発生します。そして、一番遠い点は遠点(c)となり、一番近い点は近点(a…衝突した位置)になります。これは、衝突が周回天体進行方向で起こった場合ですが、周回天体進行の逆方向で衝突した場合は、下図ではc位置で衝突したような軌道になります。原理は同じで、運動エネルギーが減りますので、基準軌道は小さくなります。

単振動の原理
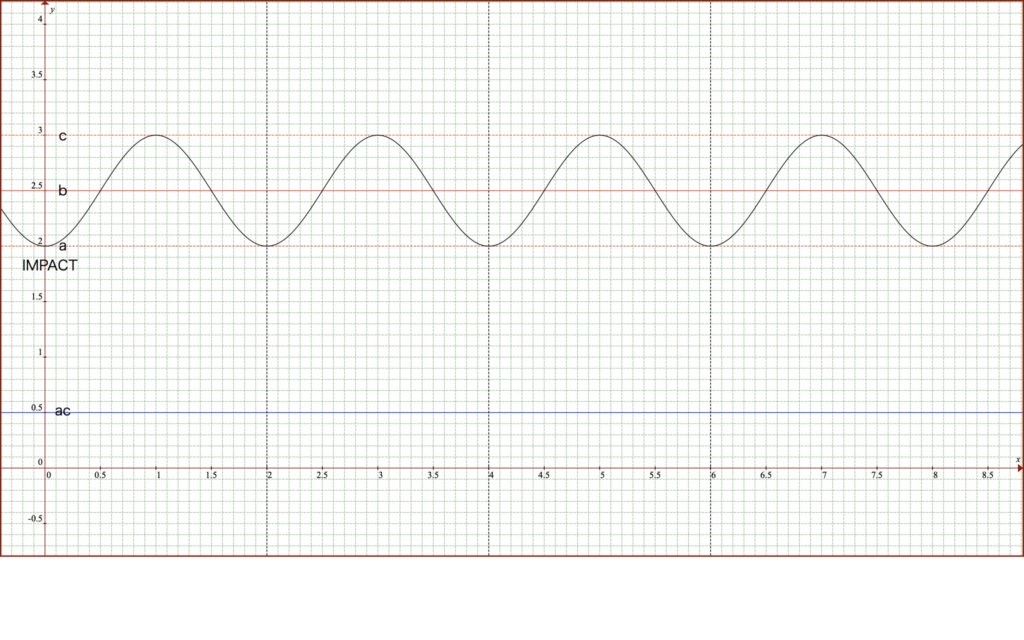
周回天体は、基準軌道をベースに中心天体の周りを回っています。基準軌道上では、「静的エネルギー」=「動的エネルギー」になります。この周回天体に他の天体が衝突すると、動的エネルギーが増減する。ここでは増加する時の場合を考えてみます。静的エネルギーは、距離によって決まるので、任意の距離(a)では一定です。そのため、動的エネルギーは静的エネルギーより大きくなり、
静的エネルギー(Sa)<衝突エネルギー(I)+ 動的エネルギー(Aa)=A’a
になります。
このアンバランスの位置(a)から、静的エネルギー=動的エネルギーとなるバランスする場所、基準軌道(b)に移動します。衝突エネルギーを減らして静的エネルギー=動的エネルギーになる位置(b)まで天体が移動します。
静的エネルギーの減衰(下図の青線)は
静的エネルギー(Sa) - 衝突エネルギー(I) = 静的エネルギー(Sb) となります。
動的エネルギーの減衰(下図の赤線)は
動的エネルギー(A’a) – 2 x 衝突エネルギー(I) = 動的エネルギー(Ab)
a点で衝突してb点が基準軌道になると、bーaの距離、反動でc点まで移動して、また、b点に戻っていく流れを繰り返し単振動します。
この図から、作用反作用がエネルギーに働いていることが推測できます。
衝突から単振動している間、全ての時点で、静的エネルギーを中心に動的エネルギーが±ゼロとなります。
衝突時は、衝突エネルギー(I)の増加分、静的エネルギーに対して、−衝突エネルギー(I)が働くとみなせます。
a点の衝突は周回天体の正方向に衝突した場合です。周回天体進行の逆方向の場合は、c点で衝突が起こった場合です。
単振動周期
周回天体は基準軌道移動により、衝突位置の基準軌道aから衝突後の基準軌道bへの移動するため、移動距離f=b-aが振幅となり、基準軌道bを中心に振幅fの単振動する。この振幅は楕円軌道の中心からの焦点距離に等しい。
単振動の周期TAは、面積エネルギーをEA、衝突後の基準軌道半径をbとすると、基準軌道bで安定するので、バネ定数が

のバネと見做すことができ、単振動周期は

(h)となります。
この式から、質量が変化しない限り、円軌道の周期TbとTAは同じになり、円軌道+単振動で、見かけ上楕円軌道なる。
近点移動
単振動の周期TAは、質量の変化により変化します。
公転周期と単振動周期の差により、近点移動が発生します。
単振動周期と公転周期同一の証明
m:質量[kg] k:バネ定数[je・km-2] Sa:衝突前静的エネルギー[je] a:基準軌道半径[km] [proof] 静的エネルギーと動的エネルギーがバランスすると、Sa=A=mv2….①と表される ①式の両辺をa2で割ると、 ここで、 ②式と③式より → ⑤式の両辺に2πをかけると、 ⑥式の右辺は公転周期T、左辺は単振動周期(TA)となり、質量m固定の場合は、T=TAとなり、公転周期と単振動周期は等しくなる。 |
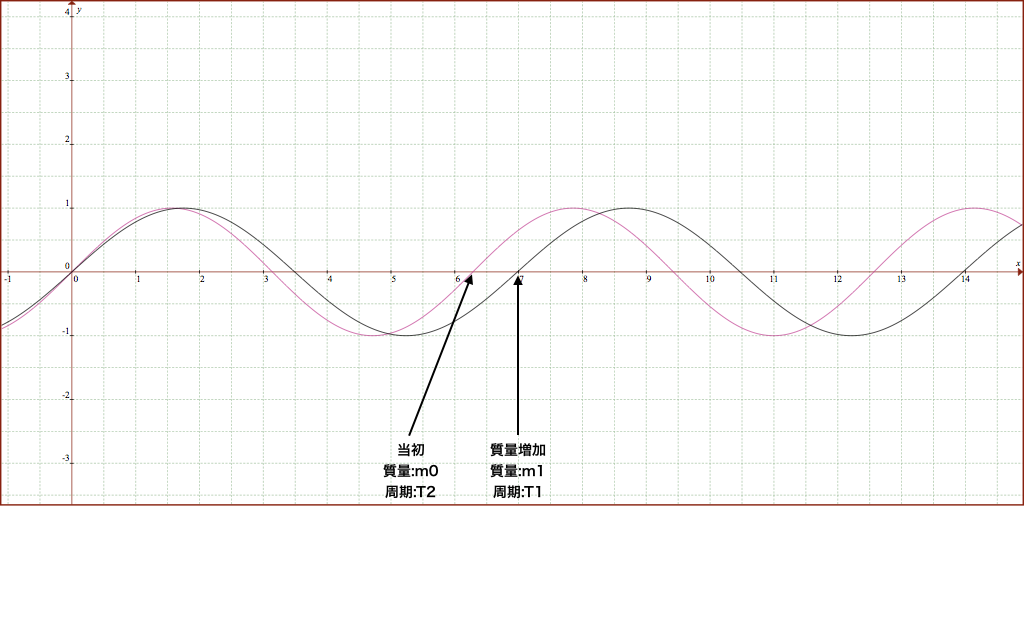
月の場合、8.85年で近点が一周回ります。すなわち、月が1回公転すると約3度前進します。
月の周期T1=655h、質量m1=7.35e22 kgとすると3度進むには、5.4時間かかります。(655(h)/360(度) x 3(度))
質量の変化による近点移動により、m2 = m1 x ( T2 / T1 )2なので、
m2 = 7.35e22 x ((655 + 5,4)/655)2 = 7.47e22 kg
Δm = m2 – m1 =1.2e21
∴月の質量は、衝突により1.2e21 kg 増加したことになります。
この理論は、水星の近日点移動にも応用できます。
移動先の基準軌道(b)
次は、衝突した後の基準軌道(b)、については次式のように計算できます。
静的エネルギー(Sa) - 衝突エネルギー(I) = 静的エネルギー(Sb) (Sb = Sa – I )に 位置bの静的エネルギーSb = Em(ac/b) を代入してbを求めると
となり、これを基準軌道半径方程式と呼ぶことにします。
Emacは、周回天体の質量 に光速の2乗を乗じたEmと両天体の質量で決まる光速時基準軌道半径acをかけた値なので、中心天体と周回天体の質量が決まれば一意に決まります。
Saは、衝突時の位置aで算出できます。すなわち、衝突エネルギーIがわかれば、どこに基準軌道が移動するかわかります。
衝突エネルギーは、衝突天体の軌道方向の運動エネルギーと解釈できるので、衝突天体の動的エネルギーが分かれば、計算することができます。動的エネルギーは、質量 x 速度2なので、楕円軌道の大きさがわかれば、衝突天体のある程度の質量と速度を想定することができます。(※下の例で計算してみます)
例.月に仮想天体Xが衝突した場合
当初月は、現在の近地点ap=3.56e5kmで円軌道を動いていました。
その位置で他の天体Xと衝突して、現在の軌道になったと仮定します。
衝突天体の衝突エネルギー I = mi x vi2=5.80 e28kg・ km2・h-2
(衝突天体X 質量mi=3.68e21 衝突速度vi=4.00e3km/hを想定)
と仮定します。
月の移動後の基準軌道位置(b)は、基準軌道半径方程式

= 3.84e35 / (1.06e30 – 5.80e28) = 3.84e5 kmとなります。
※Em acは、 mc2 x U(M+m) = 3.84e35 kg・ km3・h-2
Saは、 Emac / a = 1.06e30 kg・ km2・h-2となりますので、
天体Xが衝突したとすれば、基準軌道が、3.56e5km から 現在の3.84e5kmに基準軌道移動します。
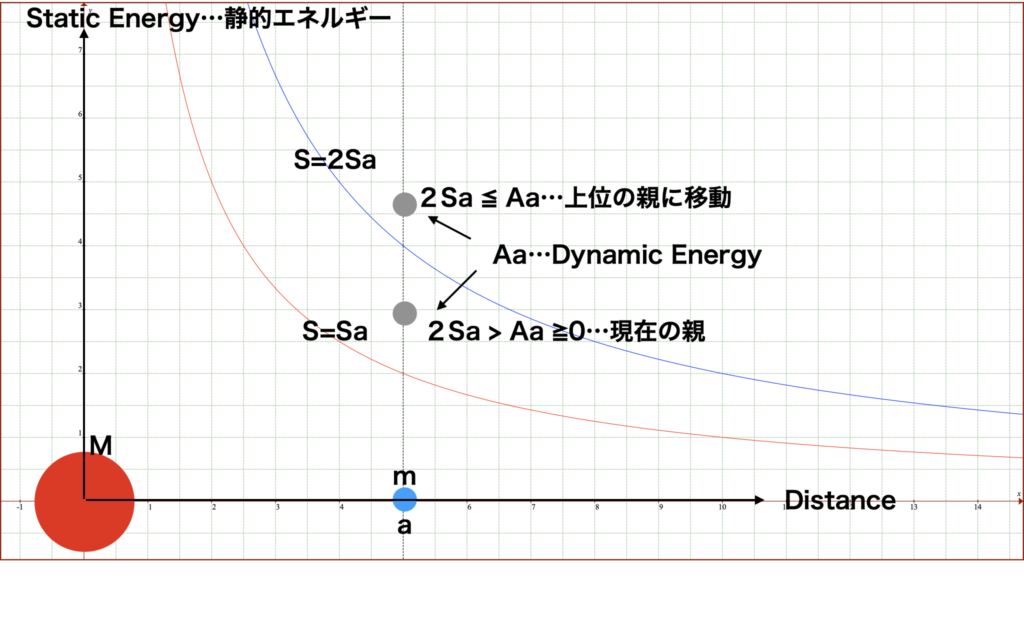
軌道形態
基準軌道半径方程式で、重要なのは分母がゼロになる時、つまりbが無限大になる時です。つまり、Sa=Iの時です。
これが、親が変わる境界です。それ以上の衝突エネルギーになると、周回天体の親は、中心天体の親(一つ上の親)に変わります。例えば地球の周りを回っている月に、基準軌道の静的エネルギーの大きさ以上の衝突エネルギーが衝突によって供給されると、太陽が親になり太陽の周りを周りを周ります。
実際に、月で実験するわけにはいきませんが、ロケットが第二宇宙速度を得て、地球を脱出する話と同じことです。
軌道形状は、衝突エネルギーの大きさにより(1)大楕円軌道、(2)円軌道、(3)小楕円軌道、(4)落下の4つに分類できる。
ニュートンとケプラーによる放物線、双曲線軌道は、動的エネルギーが静的エネルギーの2倍を超えてしまうので、上位の親に中心天体が移ってしまうため発生しない。
| 条件 | 軌道形状 | 基準軌道b |
| Big Ellipse | ∞>b>a | |
| Circle | a=b | |
| Small Ellipse | 0<b<a | |
| Fall | b=0(中心天体の中心) |
Sa:静的エネルギー[je]
 |
親判定
衝突エネルギーがSa=Iの時、移動後の基準軌道は

であるから、b=∞になり、親が子を拘束できる範囲を超え、上位の親へ移動します。
これは、子の動的エネルギーA’=A+Iが2Saを超えると上位親移動することを意味します。
【親判定の条件】
衝突エネルギーによる判定
| 条件 | 親 |
| 上位親 | |
| 現在親 |
動的エネルギーによる判定
| 条件 | 親 |
| 上位親 | |
| 現在親 |
Ia:衝突エネルギー[je]
Sa:静的エネルギー[je]
二重衝突ロジック
一回の衝突の軌道の変化は、前項でものべたように、サイン波の楕円軌道になります。そこで、もう一度衝突したらどうなるかということを検討してみました。
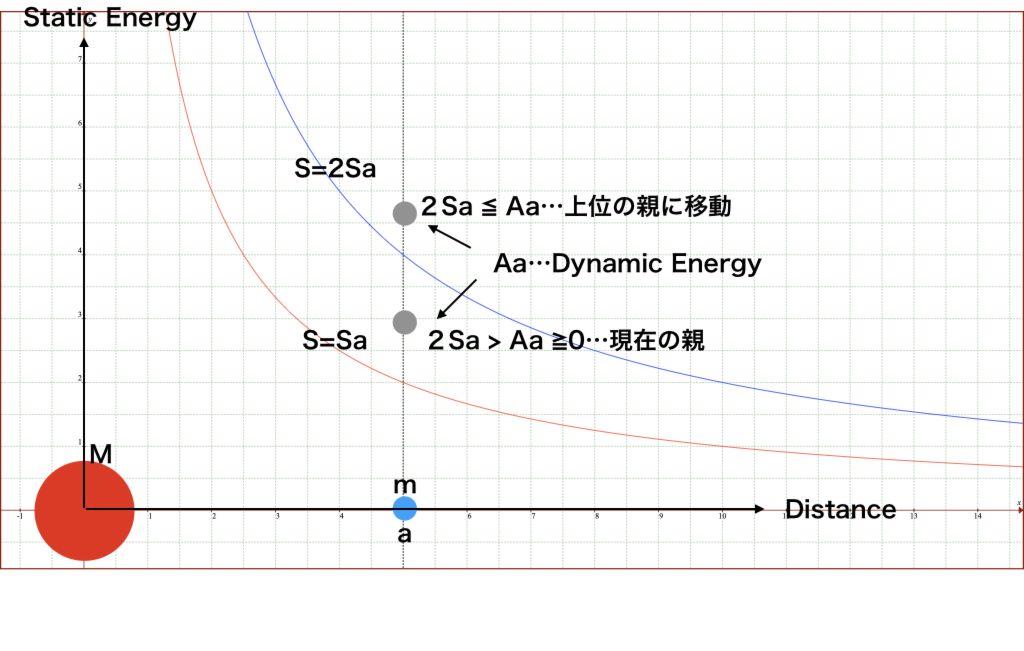
ここで例を使って二重衝突のロジックを考察します。
円軌道の軌道周期(例T0=1000時間)が基準軌道の移動で軌道周期(例T1=1100時間)に変化しています。もしこの周期(例T1=1100時間)の見かけ上の楕円軌道天体に、さらに衝突があって基準軌道が移動し軌道周期(例T2=1200時間)になった場合を考えてみます。
まず、楕円軌道の単振動の式をf=Acosωt とします。ここで三角関数にcosを使ったのはt=0で最大にしたかったためです。
fは振幅位置、
Aは楕円軌道の単振動振幅、
ωは各振動数、
tは時間です。
この式に基準軌道半径a0を加えたが地心座標になります。
y=Acosωt + a0
ここで、角振動数ω=2π/Tなので
ω0=2π/T0
ω1=2π/T1
ω2=2π/T2となります。
ω1とω2をω0をベースで表すと、
ω1=T0/T1 x ω0
ω2=T0/T2 x ω0になります。
ここで、周期の比率α1=T0/T1、α2=T0/T2を周期率とすると
周期の比率(周期率)は、
1回目の衝突の周期率(α1)はα1=0.90909
2回目の周期率(α2)は、α2=0.83333になります。
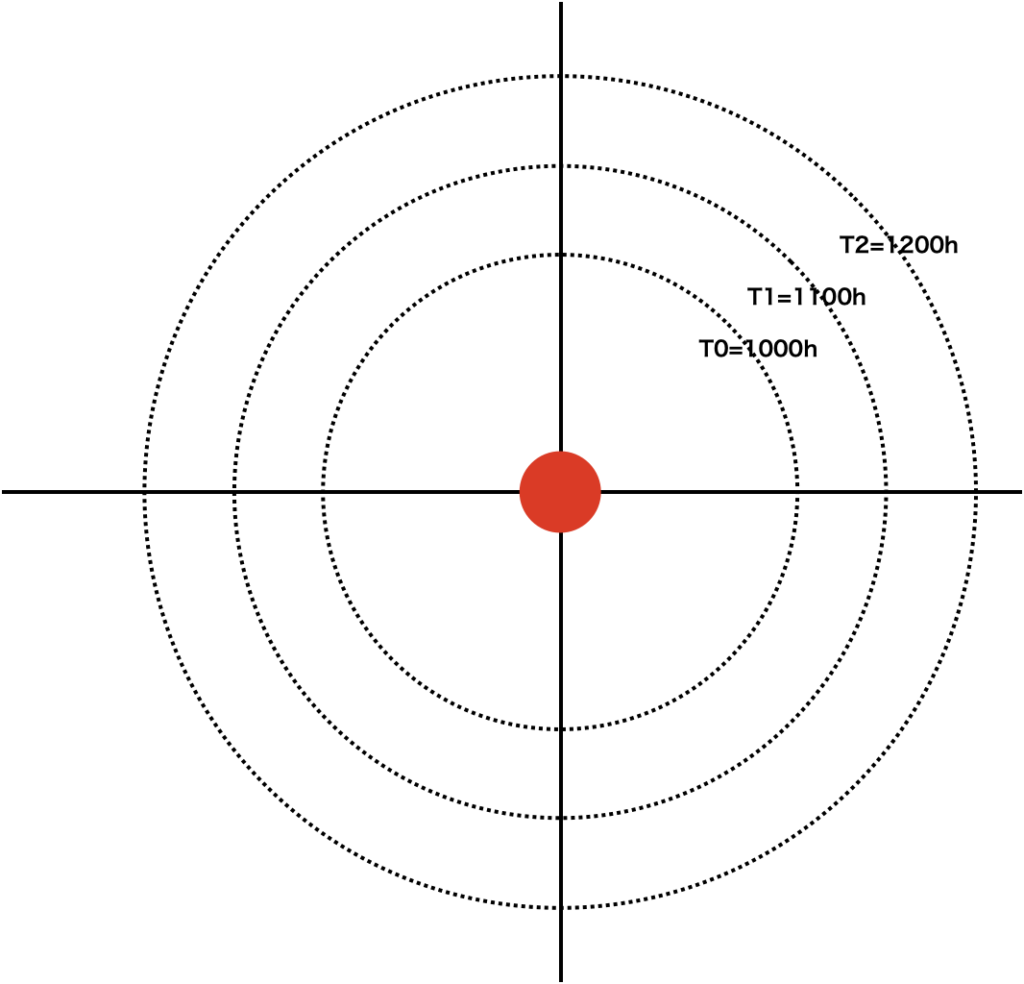
ここで、1回目の衝突の単振動の振幅を100km とすると、1回目の楕円軌道の単振動の式はf1=100cos(0.90909ω0t)となります。
次に2回目の衝突の単振動を200kmとすると、2回目の楕円軌道の単振動の式はf1の単振動は、角振動数α2は0.83333、唸り率は0.2になるので、単振動の式は、f21=100cos(0.83333ω0t)cos(0.2ω0t)になります。
唸り率β2は、β2=(T2-T0)/T0で計算します。β2=0.2となりうなりは5回周期で起こることになります。
しかし、第一回目の軌道のどの位置で、衝突したかが問題になります。上の式の場合、基準軌道上で衝突した場合になってしまいます。
そこで、衝突位置を考慮した場合の、基準軌道からの距離を(Ip=40Km)とすると単振動の式は、f21=(100cos(0.83333ω0t)-40)cos(0.2ω0t)になります。
しかし、第一回目の軌道のどの位置で、衝突したかが問題になります。上の式の場合、基準軌道上で衝突した場合になってしまいます。そこで、衝突位置を考慮した場合の、基準軌道からの距離を(Ip=40Km)とすると単振動の式は、f21=(100cos(0.83333ω0t)-40)cos(0.2ω0t)になります。
第一回目の軌道は上図のようになります。
第二回目の起動はf22=200cos(0.83333ω0t)
第二回目の衝突の後の軌道f2=f21+f22は次図のようになります。これは第一回目の単振動が基準軌道から40kmのところで、上下に分割して第二回目の衝突で発生したf22の単振動の遠近点上に合成された形になります。200Kmのところで260Km〜140Kmの範囲で振動、また、-200Kmのところで-240Kmから60Kmの範囲で振動していますこれは、二重衝突による「唸り軌道」と呼ぶことにします。
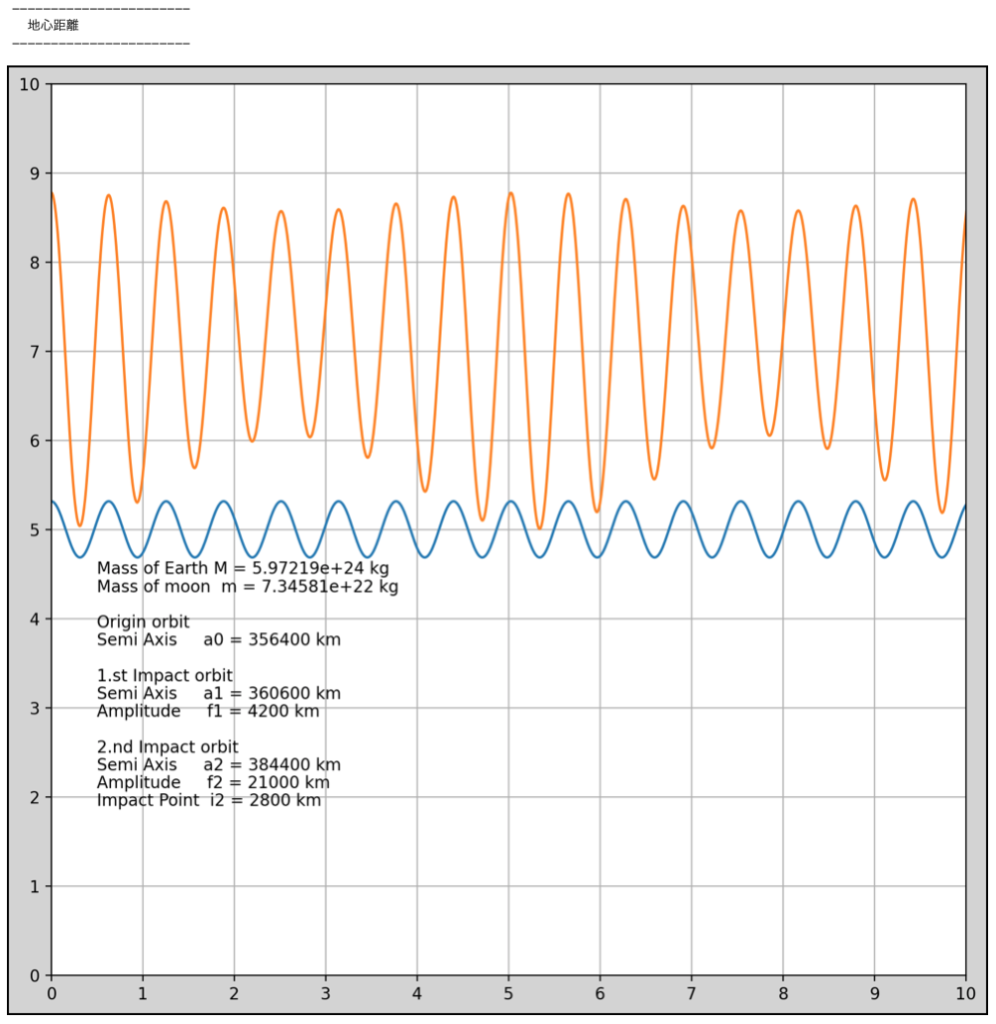
では、ここで月軌道のモデリングデータで計算してみます。
月軌道のモデリング
| 軌道形状 | 基準軌道半径 | 振幅(f) | 衝突位置 | 軌道周期 | |
| 当初 | 円軌道 | 356,400km | – | 584.68h | |
| 第1衝突 | 356,400km | ||||
| 楕円軌道 | 360,600km | 4,200km | 595.04h | ||
| 第2衝突 | 363,400km | ||||
| 楕円軌道 | 384,400km | 21,000km | 654.91h | ||
地心座標 第1衝突による 単振動
当初軌道周期 T0=584.68h第1回軌道周期 T1=595.04h唸り率 β2=(T2-T0)/T0=0.12012第1回衝突オフセット Ip1=0第2回衝突オフセット Ip2=2800=363,400 – 360,600第1衝突振幅 A1=4,300Km
f21=(A1cos(α2ω0t)-Ip2)cos(β2ω0t)=(4200cos(0.89276ω0t)-2800)cos(0.12012ω0t)
地心座標 第2衝突による 単振動
f22=A2cos(α2ω0t)=21000cos(0.89276ω0t)
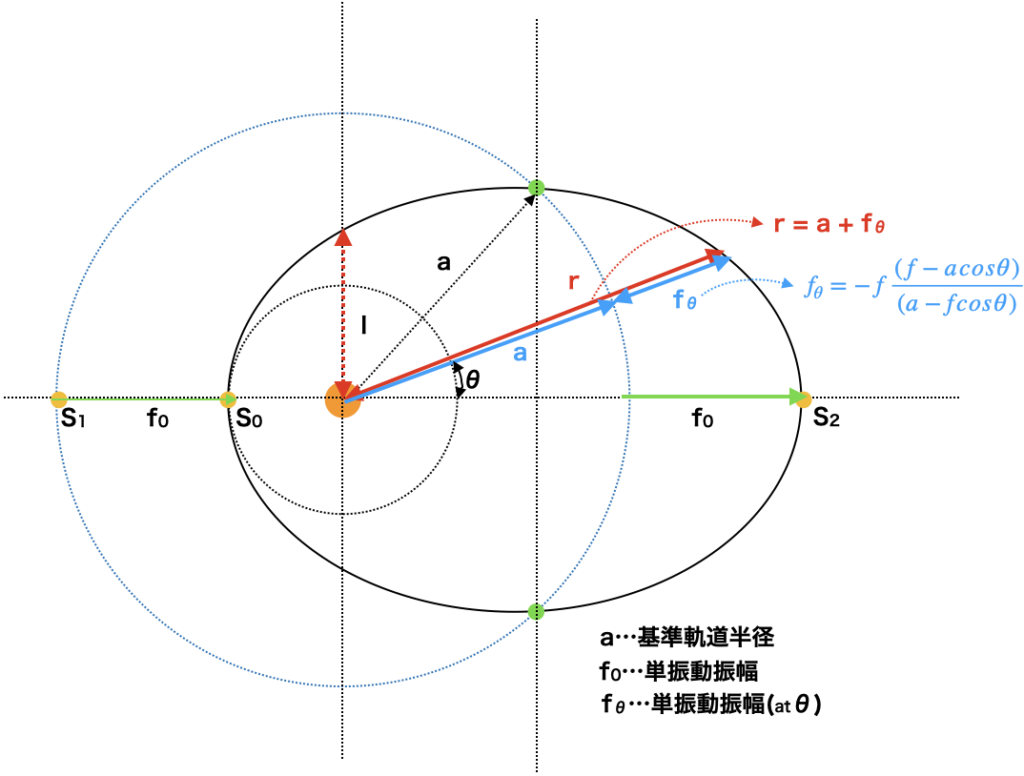
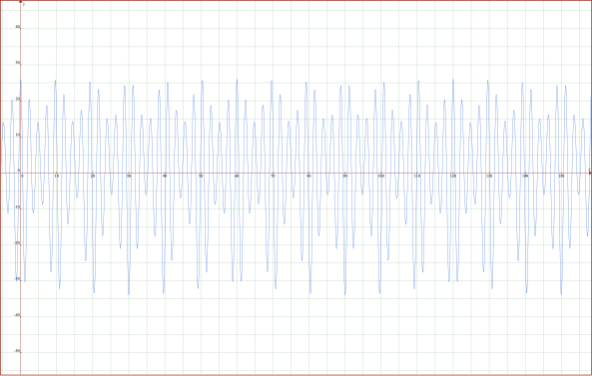
月軌道の地心座標
第1衝突と第2衝突を合成すると f2 = f21 + f22
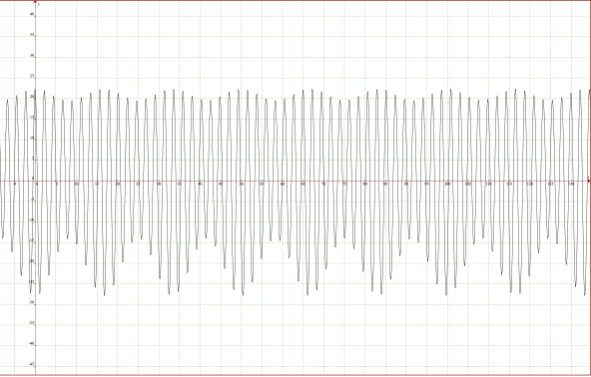
この地心座標は、国立天文台の地心座標のグラフと類似しています。二重衝突がエキセントリックな軌道上を月が移動していると推測できます。これが、月のエキセントリックな軌道の原因です。
そして、重力がなくても、月の軌道が説明できることから、「非重力理論」の仮説は、正しいことになります。
月軌道から非重力理論へ

なんと難しいタイトルをつけてしまった。(汗)
このサイトで言いたいことを簡潔に書いておこう。と思って書いてます。
そもそも非重力理論てなんだ!と云う話ですが、「重力はないんじゃね」と云うことです。
おいおい、何をおっしゃるウサギさん、と言われそうですが、
当てずっぽうではありませぬ。
思いついたのは、月のエキセントリックな軌道を研究している最中でした。
そこで、どうして、月の軌道から、非重力理論にたどり着いたかを説明したいと思います。
(「思います」は自信ねええんじゃないの。「します」だろ!)
まあ、細かいことはさておいて、とりあえず、
月のエキセントリック軌道について説明していきます。
まずは実際に起こっている現象から、お聴きください。
本サイトでもモデリングのブログで詳細を載せてあります。
月のエキセントリックな軌道
改めて、月は非常にエキセントリックな軌道を動いています。
エキセントリックな軌道の一番目は、
近地点、遠地点の距離が一定でない上に、
近地点が移動していることです。
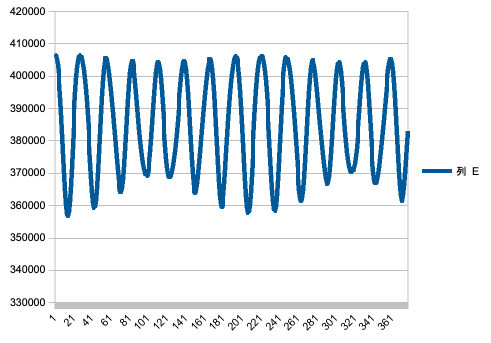
これは、X軸が時間でY軸が地心距離です。
地心距離とは、地球の中心から月の中心までの距離です。
グラフを見ると、360,000Kmから370,000Kmあたりが近地点で、
地球に近づいたり、遠のいたりしています。
一番近づいた時をスーパームーンと呼ぶ時もあります。
近いから大きく月が見えるからです。
スーパームーンは、最近一般的に使われている名前ですが、正式名ではないようです。
そして、405,000Kmあたりで地球から近づいたり遠のいたりしているのが遠地点です。
近地点ほどの大きな差はありませんが微妙に近づいたり遠のいたりしています。
アッ!言い忘れましたが、
このデータは、国立天文台の地心距離のデータからEXCELを使って作成したリアルなデータです。
大体の月の動きが分かっていただければOKです。
ここまでは事実です。
エキセントリックな軌道の理由は
月のエキセントリックな軌道の原因は。国立天文台のサイトでは、
「太陽の影響」と言っています。
詳しくは、国立天文台のサイトトを見てください。
しかし、太陽の引力で説明すると、かなり無理がある箇所があります。
例えば、「地球が月をとどめておけるのは、
地球も月もともに太陽に引っ張られているからで、
太陽が地球を引っ張る引力で
太陽が月を引っ張る引力を相殺した分よりは、
地球が月を引っ張る引力が大きいからです。」
と云う説明があります。
概算で計算してみると
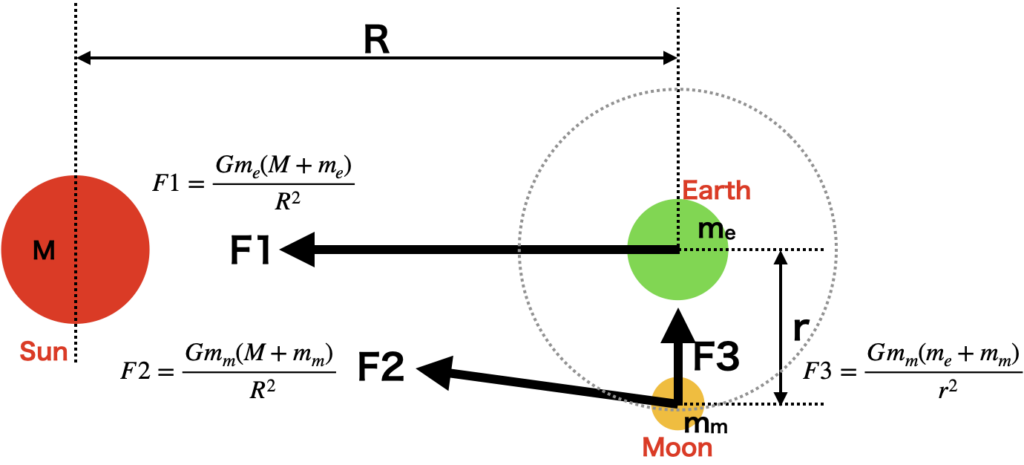
相殺(太陽が地球を引っ張る引力(F1) – 太陽が月を引っ張る引力(F2))は、
地球が月を引っ張る引力(F3)の170倍くらいあります。
ですので、国立天文台のロジック通りだとすると月は太陽の方に落ちていく(太陽の周りを回る)が正解になります。
しかし、月は地球に落ちていくと言っていますので、
この時点で説明が破綻しています。
と云うことは、
太陽は月を引っ張らないと云うことです。
従って、月は太陽の影響を受けないと云うロジックならば、
月が地球の周りを回ると云う説明ができます。
月は太陽の影響を受けないとすると、「摂動」「出差」「二均差」などの事象は起きないと云うことです。
そこで、親子理論の登場
月のエキセントリックな軌道は、
太陽の影響を受けないと言ってしまいましたが、
月は、地球の周りを回っていながら、
地球と共に太陽の周りを回っています。
そこで、考えたのが、エネルギーの継承です。
つまり地球は太陽からエネルギーが継承されます。
エネルギーとざっくり言ってしまいましたが、
太陽が銀河中心の周りを回るエネルギー位に考えてもらえばいいと思います。
そうすると、太陽は銀河の中心と同じように動きます。
すなわち太陽から見ると、銀河の中心は止まっているように見えます。
その継承されたエネルギーに銀河の周りを回るエネルギーがプラスされているので、
銀河の周りを回ることができるとします。
地球は、銀河から継承されたエネルギーを持った太陽のエネルギーが継承され、
地球から見た太陽は止まっているように見えます。
地球はさらに
太陽から継承されたエネルギーにプラス太陽の周りを回るエネルギーを持って
太陽の周りを周ります。
月は地球のエネルギーが継承され、
さらに地球の周りを回るエネルギーを持って地球の周りを回ります。
月から見た地球は止まっている世に見えます。
このエネルギーの継承することにより、
親は止まっていると仮定しても問題ないからです。
月の親は地球、地球の親は太陽、太陽の親は銀河中心という形になります。
親子関係は、天体同士の関係が「ツリー構造」になります。
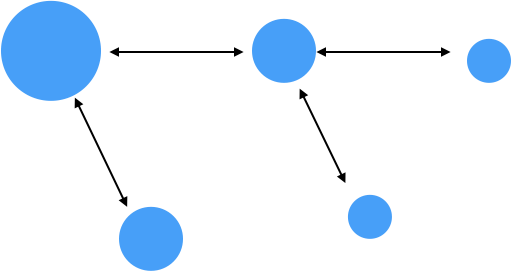
ちなみに、万有引力は、全ての天体が絡み合った「ネットワーク構造」になります。
また、子から見た親は止まっているように見えるので、
慣性が働いているように見えるので、
これを「軌道慣性」と呼ぶことにします。
では、親子はどのようにして決めるのでしょうか。
親子判定!
天体の力がどこまで及ぶのかというヒル球があります。
これは、運動していない物体に対して、天体と天体の間に物体の重力がおよぶ範囲を示した式です。
しかし、これでは、例えば月と地球と太陽の3者の位置関係が一通りしか考慮されていません。
そこで、親子理論で考えてみます。
例えば、月と地球と太陽を考えてみます。
月は太陽の影響を考えなくていいので、親子理論では、地球と月だけの関係のみを考えます。
(摂動もありません)
そうすると、親子関係に必要な要素は、地球と月の距離と月の速度になります。
地球と月が宇宙に存在することによって発生し、
距離によって大きさが決まるエネルギーを「静的エネルギー」と呼ぶことにします。
このエネルギーは、親子関係がある天体の固有の値になります。
ニュートンは、天体間の力は距離の2乗に反比例すると言っていますので、
積分されたエネルギーは距離に反比例することになります。
この静的エネルギーは、親天体の方向に子天体を動かすエネルギーになります。
子を離さない親の気持ちのようなものです。
しかし、子はわがままで、親から離れようとします。
これが先ほど出てきた速度による「動的エネルギー」です。
この「静的エネルギー」と「動的エネルギー」のバランスが軌道になります。
両方が等しければ、「円軌道」になります。
しかし、月の動的エネルギーが大きくなっていくと、
仕舞いには地球を離れて、太陽が親になってしまいます。
この離れていく動的エネルギーは、
月が円軌道を描いている静的エネルギーの2倍の動的エネルギーの時に、
親が変わります。
そこで、親が変わるエネルギーで親判定をします。
ここで、動的エネルギーが静的エネルギーの2倍未満の時はどうなるかというと、
円軌道を中心とした楕円軌道になります。
なんだ、円軌道を中心としたって。と思うと思います。
そもそも、ケプラーの第一法則では、
「天体の軌道は楕円軌道で円軌道はその特殊な場合」と言っています。
では、楕円軌道について少し考察してみます。
楕円軌道
ケプラーの師匠であるティコ・プラーエは、天体は絶対円軌道上を動いているはずだと思い自分の観測したデータから天体軌道を計算しましたが、ぴったり合いませんでした。ケプラーは、その膨大なデータから天体の軌道を楕円軌道と推測しました。
まあここまでは、いいのですが、ケプラーは、中心天体は楕円の2つの焦点のうちどちらかに存在すると考えました。そのため楕円軌道の中心と中心天体の位置は焦点距離分ずれていました。またケプラーの第3法則では、なぜか長半径を使って方程式を作りました。なぜ短半径じゃないのかというと短半径ではぴったり計算が合わなかったからだと思いますが。
そこで楕円軌道を考察し直しました。
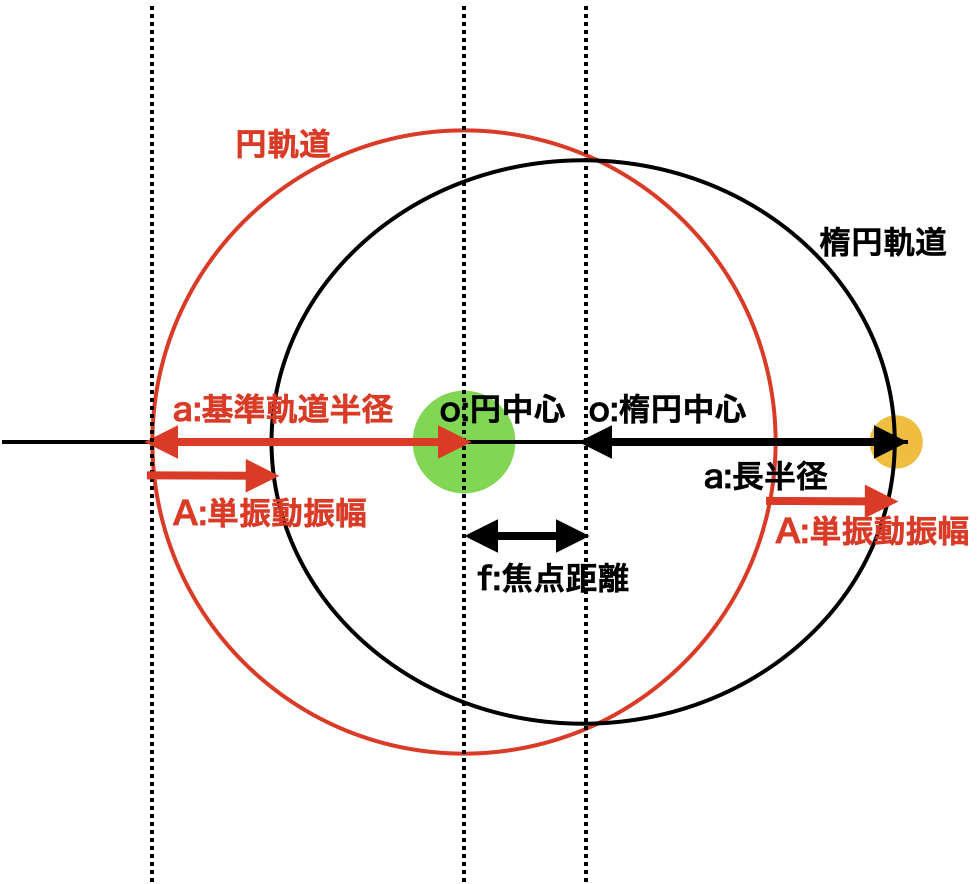
まず、天体の中心と軌道の中心を合わせます。(例えば太陽)そして、長半径の円を天体中心から描きます。(例えば太陽から地球の距離)これで、周回している天体(例えば地球)は円軌道上を動きます。これで、ケプラーの第3法則通りになります。
またニュートンの万有引力の方程式の分母の距離も長半径なので、両方の法則を満足することができます。しかし、実際は楕円軌道です。そこで、この円軌道を中心として軌道周期と同じ単振動周期で、振幅が焦点距離の円軌道と単振動の合成軌道を考えます。そうすると、楕円軌道になります。すなわち、円軌道ベースなんだけれども、何らかの原因で、単振動が加わり、見かけ上楕円軌道になったと考えれば、ケプラーの法則もニュートンの法則も満足できるということになります。
そして、ティコ・プラーエの円軌道に拘った意味もなんとなくわかります。ティコ・プラーエは、まさか見かけ上楕円軌道とは思わなかったと思います。
下の写真はティコ・プラーエです。

円軌道がベースということになると、
周回天体(例えば地球)は、
「静的エネルギー」と「動的エネルギー」が’バランスする位置に
移動しようとすると考えられます。
これは、「猫のチャーが居心地のいい坊さんのふかふかの座布団に鎮座する」のと同じです。
多分。
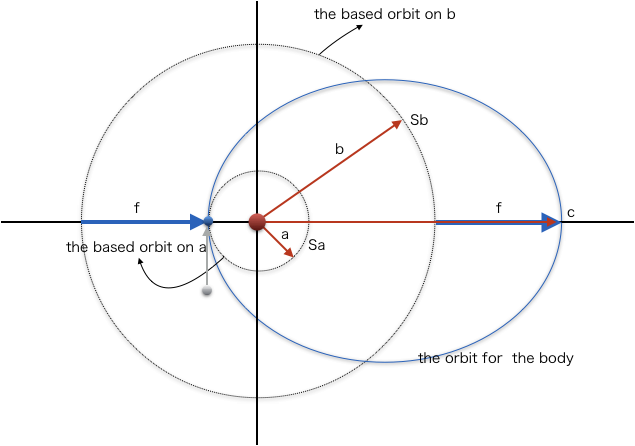
上図だと、半径aの円軌道上を動いていた天体が、
なんらかの原因で半径bの円軌道になり、
その円軌道を中心に、振幅fの単振動をして楕円軌道になったというを表しています。
中心の円軌道のことを「基準軌道」と呼びその半径を基準軌道半径と呼ぶことにします。
では、なんらかの原因とはなんでしょうか。
単振動の原因とは!
いろいろ考えられますが、
とりあえず、天体同士の衝突が原因の一つではないかと思います。
つまり、衝突により動的エネルギーが増減し、
上図ではエネルギーが増えて基準軌道がbに移動し、
元の基準軌道aから基準軌道bへ移動した距離の振幅で
単振動をするようになったと考えられます。
そして見かけ上楕円軌道に見えるということです。
では、衝突のメカニズムを考察します。
衝突による楕円軌道
ニュートンの振り子を思い出してください。
一番端の玉がその次の球に当たると、
最終的に反対側の球がはじき飛ばされます。
これはエネルギーが球を伝達したということです。
つまり衝突によりエネルギーが増加したわけです。

天体でも同様に、天体同士が衝突すると、
衝突された天体のエネルギーが増加します。
つまり、動的エネルギーが増加するわけです。
その時の衝突された天体の振る舞いを考えてみます。
基準軌道で天体は動いています。
つまり、静的エネルギーと動的エネルギーがバランスされている状態です。
そこに「衝突によるエネルギー」が増加されたとします。
これを「衝突エネルギー」と呼ぶことにします。
衝突エネルギー分静的エネルギーと釣り合わなくなります。
そのため、衝突された天体は、
静的エネルギーと動的エネルギーがバランスする場所に
基準軌道を移動しようとします。
衝突エネルギーを消費してバランスする方向に移動することになります。
衝突エネルギーが増加した場合は、
中心天体より遠のく方向に移動して、
衝突エネルギーを消費します。
衝突された天体が遠のくと、
静的エネルギーも距離に反比例して減っていきます。
そして釣り合う場所は、
衝突した位置の静的エネルギーがら衝突エネルギーを差し引いた位置になります。
基準が静的エネルギーで、
動的エネルギーの作用反作用(力の作用反作用のエネルギー版)によって
衝突エネルギーが減衰してゼロになります。
図にすると、このようになります。
上図では、青線が静的エネルギー、赤線が動的エネルギーになります。
そして、上図では、
aの位置で衝突し、衝突エネルギーをIa として減衰し、
bの位置で衝突エネルギーがゼロになる様子を表しています。
aからbに基準軌道が変わったため、
反動で、移動した分反対側cまでに移動して、
またbに戻ってきて単振動を繰り返すということになります。
すなわちこの基準軌道bを中心に
振幅b ~aの単振動をするようになり、
見かけ上楕円軌道になります。
これを時系列に表すと次のようになります。
(時間的な流れからすると正確な単振動にはなりませんが、イメージです)
しかし、この地心座標は、エキセントリックな軌道ではありません。
普通の楕円軌道です。
一旦ここで整理してみます。
今までの内容を整理してみます。
(1)月はエキセントリックな軌道上を動いている。
(2)エキセントリックな軌道は、遠地点と近地点が変動している。
(3)エキセントリック軌道の原因は太陽の引力ではない
(4)地球と月は親子関係にある。そして月は地球の慣性軌道情にある
(5)楕円軌道は円軌道と単振動の合成軌道である
(6)楕円軌道の原因の一つは衝突である
(7)衝突時に衝突された天体の動的エネルギーに衝突した天体の衝突エネルギーが加算される
(8)加算された衝突エネルギーがゼロになる位置まで衝突された天体jは移動sる
(9)衝突された天体は衝突エネルギーがゼロになる位置を中心に単振動する
というのがざっくりな話でした。
では次はエキセントリックな軌道の原因について、説明します。
エキセントリックな軌道の原因。
エキセントリックな軌道の原因は、
結論から言うと、
小惑星との大きな2度の衝突によるものです。
(実際は、もっと細かい衝突があったと推測されます)
当初月は円軌道上を動いていました。
そこへ小惑星などが衝突しました。
衝突の結果、楕円軌道になりました。
しばらくして、また月へ小惑星が衝突しました。
その結果、最初の楕円軌道が衝突した位置で、
2つに別れて遠点と近点で単振動するようになりました。
ところが、
当初の公転周期と2回目の衝突後の公転周期に差ができたため、
その差で唸りが発生しました。
これを、二重衝突による「唸り軌道」と呼ぶことにします。
これをもとに計算すると、
月のエキセントリックな軌道を説明することができます。
これが、エキセントリックな月軌道の原因です。
※詳細はこのブログを参照ください。
とすると、特に太陽の影響を考えなくても、
ある程度正確に月のエキセントリックな軌道が推測できます。
また、重力や引力を考えてなくても良いとことになります。
これが非重力理論に気がついた理由です。
長くなりました。