
楕円軌道は、衝突により発生します
近点衝突
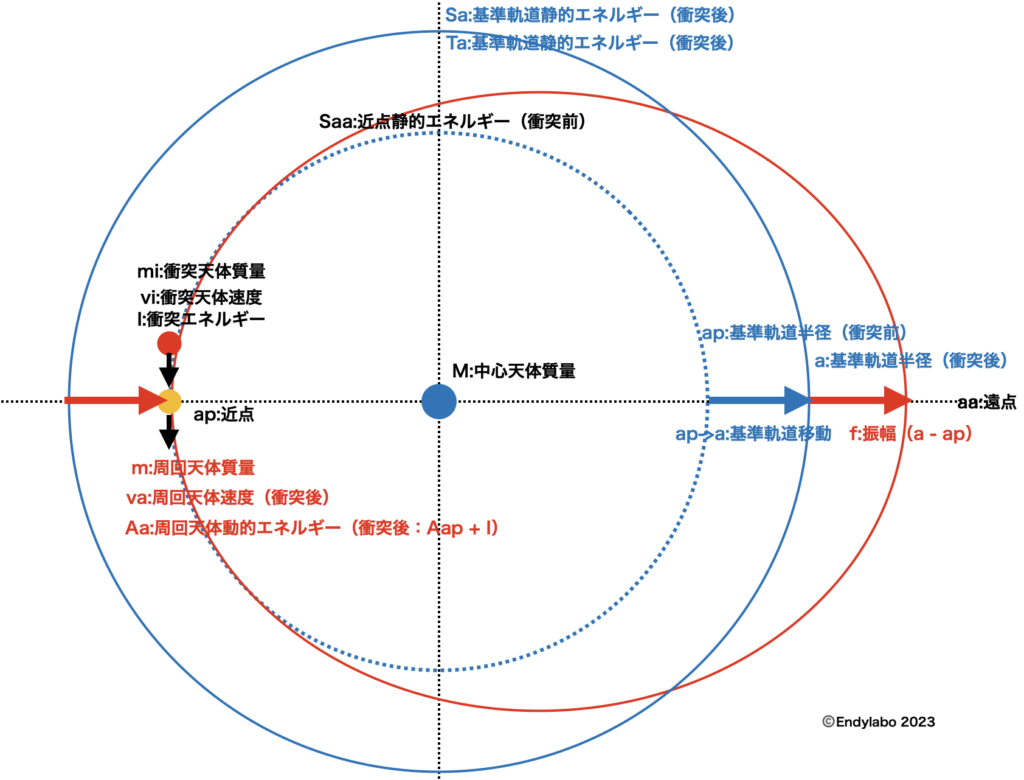
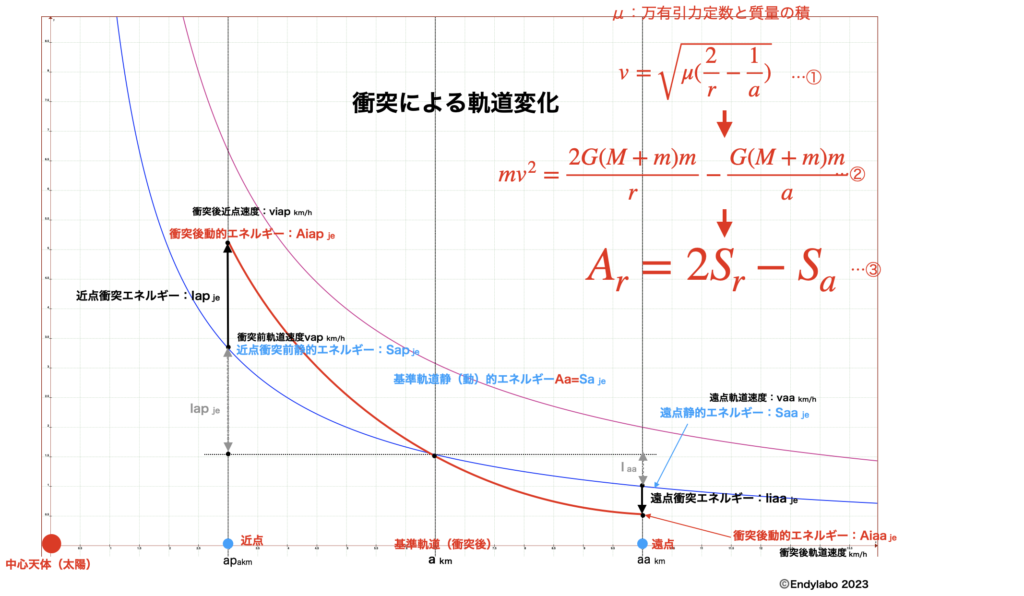
衝突による軌道変化
遠点衝突


衝突による軌道変化(遠点距離)

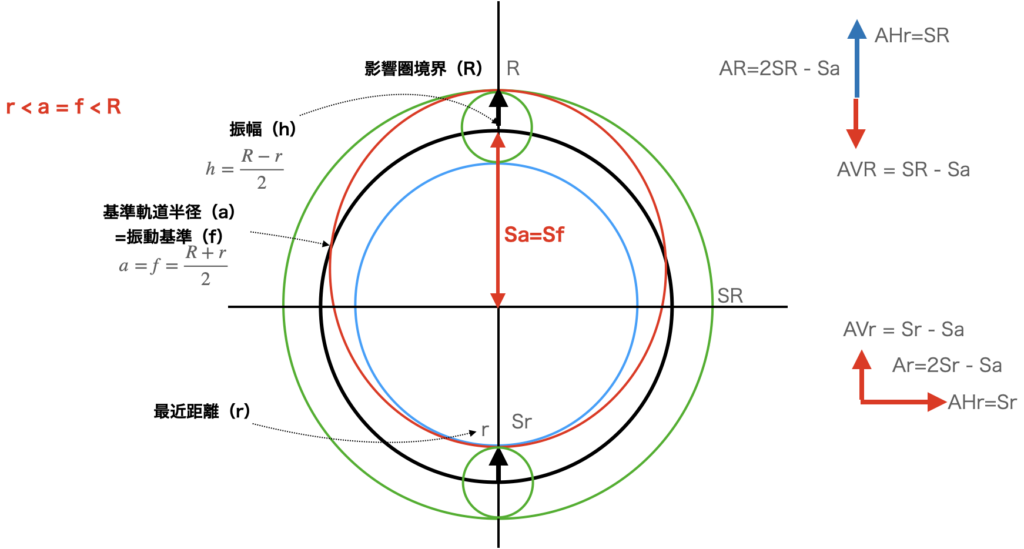
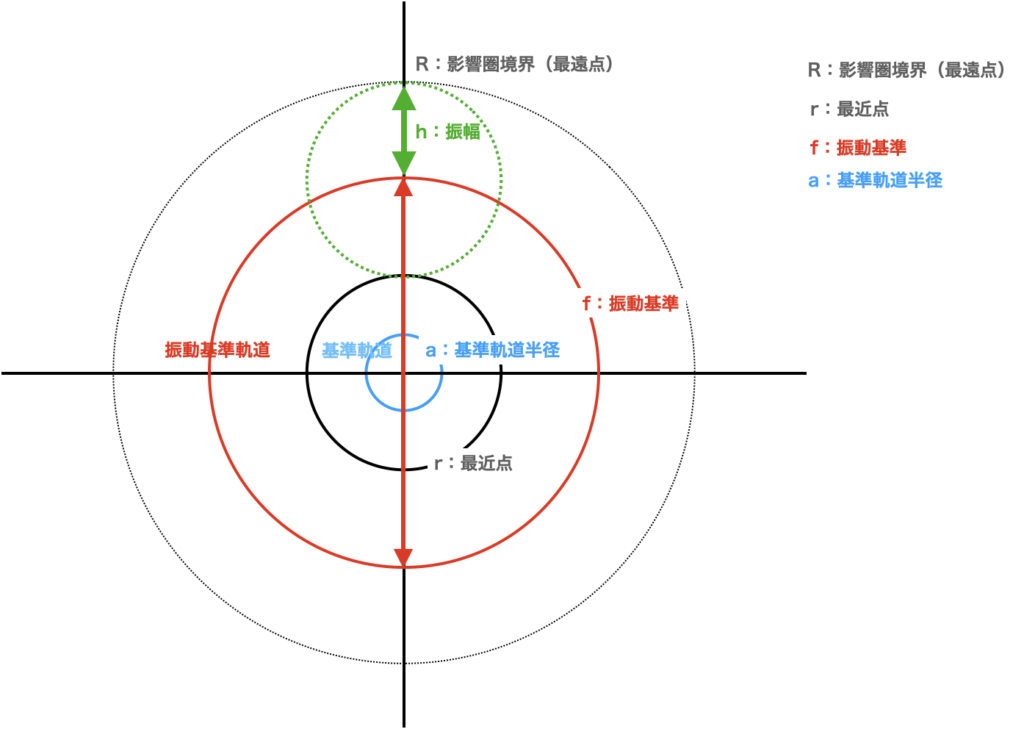
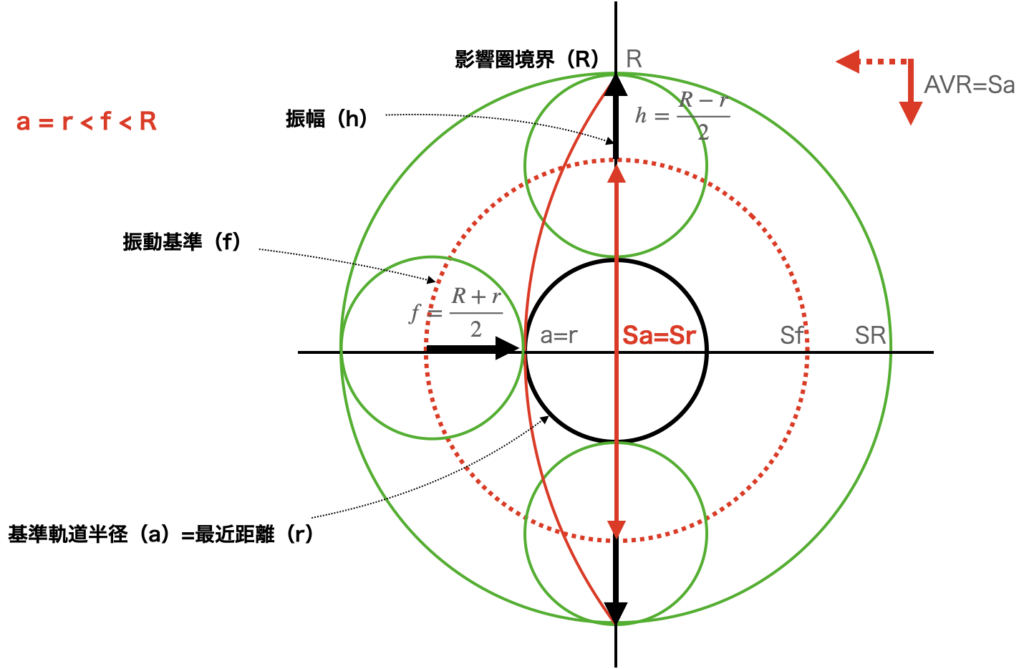
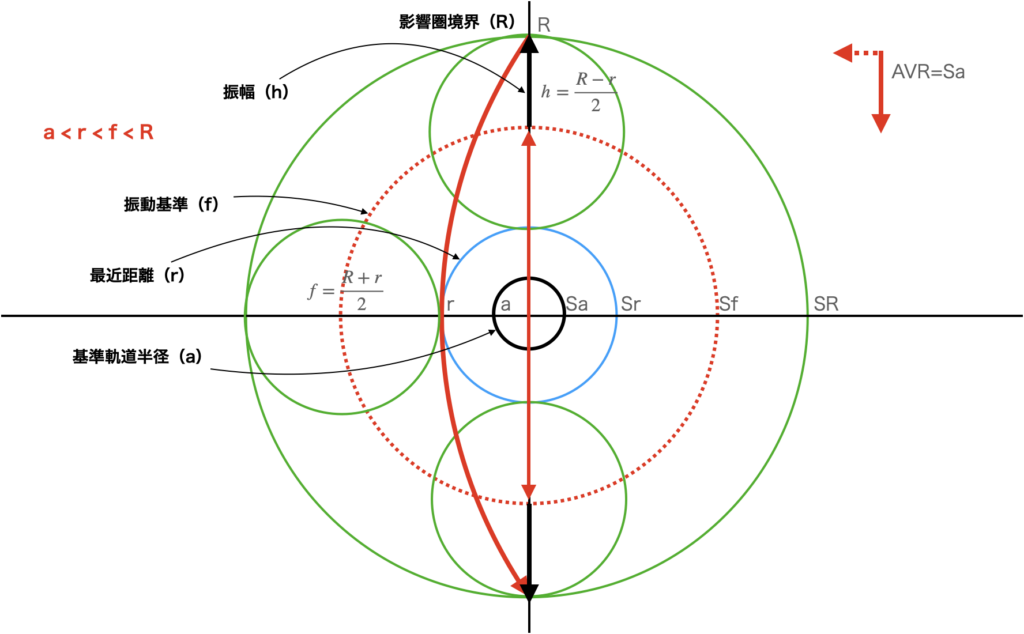
基準軌道と振動基準
振動周期

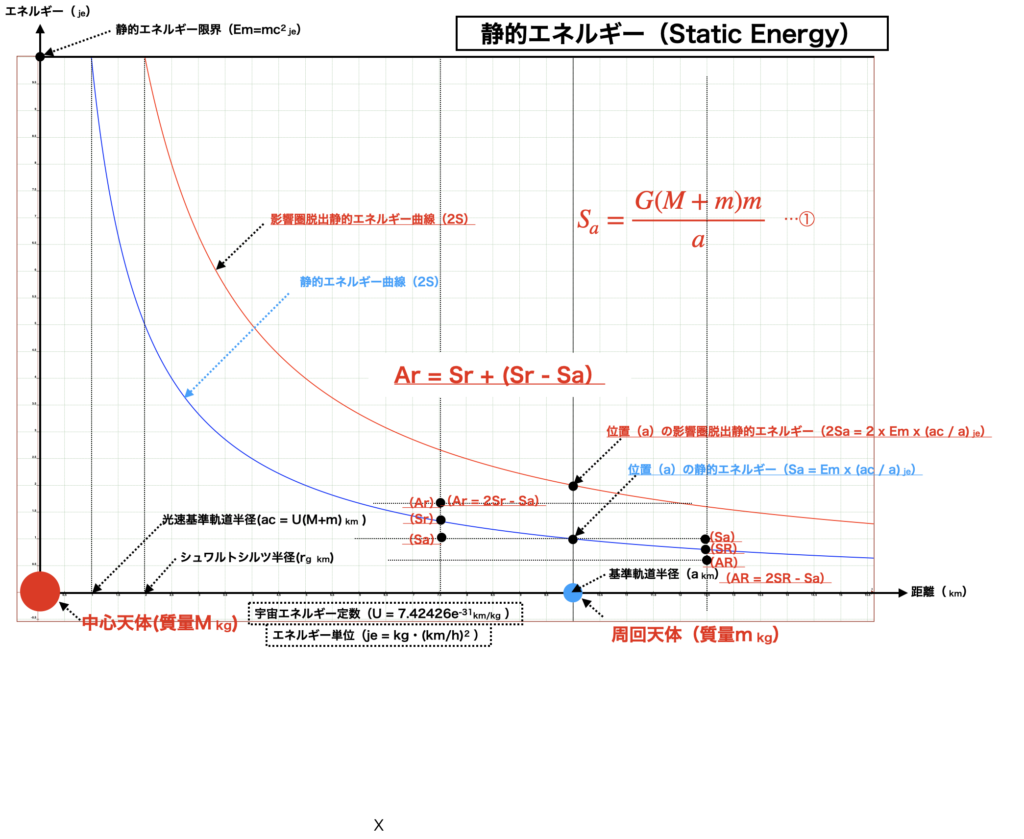
静的エネルギーと動的エネルギー

楕円軌道は、衝突により発生します
近点衝突
衝突による軌道変化
遠点衝突
衝突による軌道変化(遠点距離)
基準軌道と振動基準
振動周期
静的エネルギーと動的エネルギー
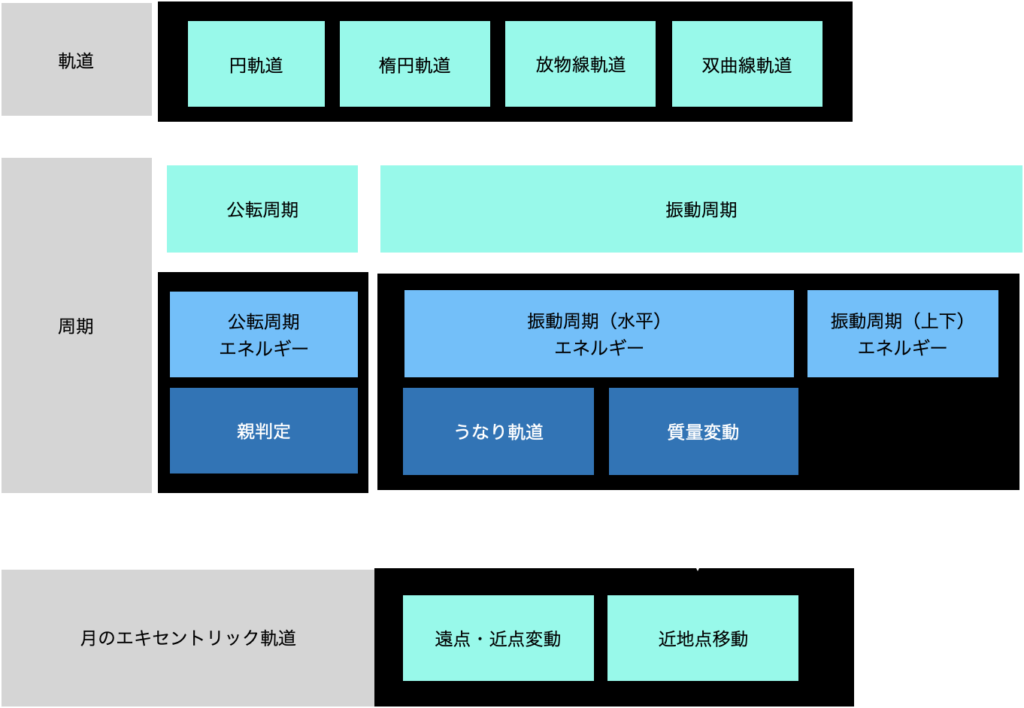
軌道種類は、
円軌道
楕円軌道
放物線軌道
双曲線軌道1
の4種類あります。
これらは、
公転周期と振動周期の2種類の周期があります。
というか、2種類の周期で軌道が決まります。
| 距離名 | 中心からの距離 | 静的エネルギー(S=EA/x) | 位置エネルギー | 軌道速度(sqrt(S/m)) | 軌道周期 |
| 基準軌道半径 | a | Sa | va | Ta=2πa/va | |
| 最近点 | r | Sr | vr | Tr=2πr/vr | |
| 振動基準 | f = ( R + r ) / 2 | Sf | Pfh=Sf(h/f) | vf | Tf=2πf/vf |
| 振幅 | h = ( R – r ) / 2 | Ph=Pfh(h/f) | vh | Th=2πh/vh | |
| 影響圏境界最遠点 | R | SR | vR | TR=2πR/vR |
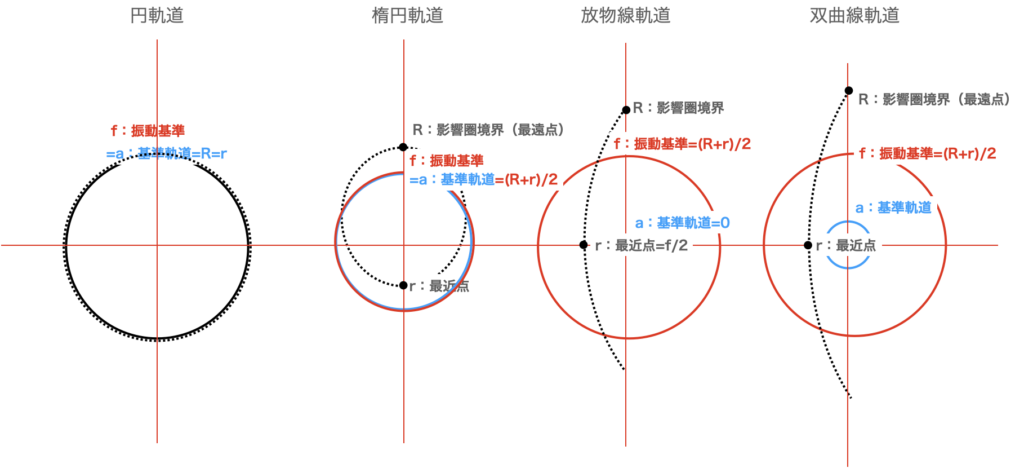
| 距離名 | 近点 | 遠点 | |||
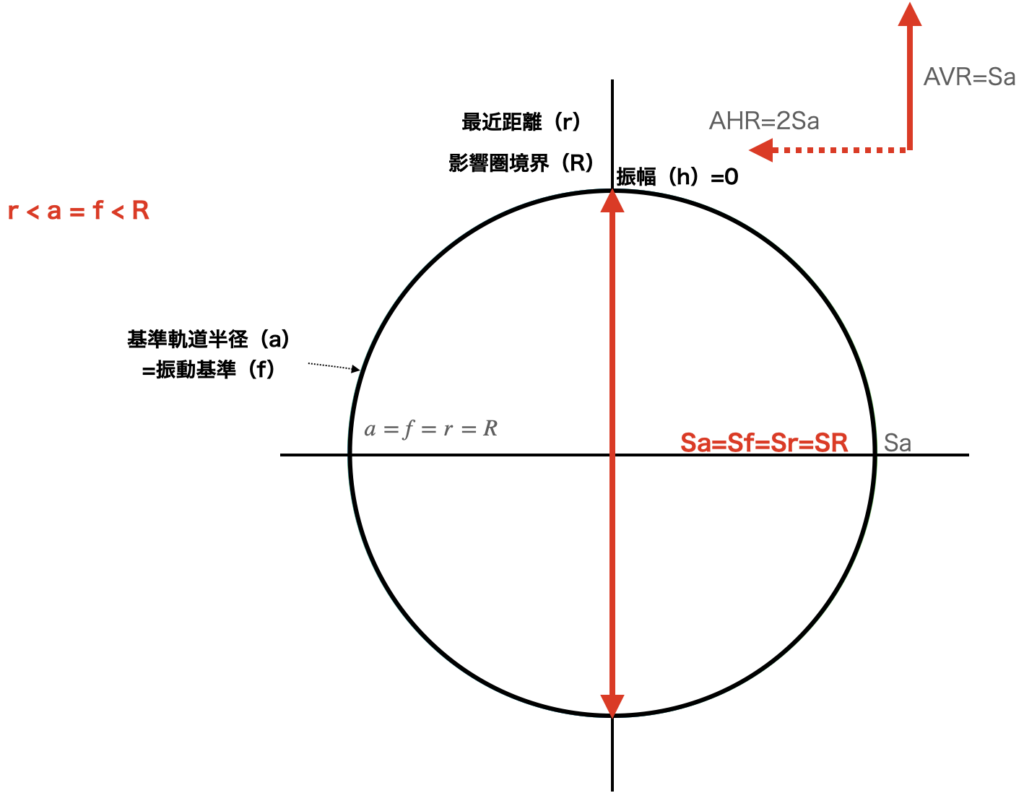
| 円軌道 | 最近距離(r)=基準軌道半径(a)=振動基準(f)=影響圏境界(R) | 振幅(h)=0 | |||
| 楕円軌道 | 最近距離(r) | 基準軌道半径(a)=振動基準(f) | 振幅(h) | 影響圏境界(R) | |
| 放物線軌道 | 基準軌道半径(a)=最近距離(r) | 振動基準(f) | 振幅(h) | 影響圏境界(R) | |
| 双曲線軌道 | 基準軌道半径(a) | 最近距離(r) | 振動基準(f) | 焦点軌9道半径(h) | 影響圏境界(R) |
円軌道
楕円軌道

放物線軌道
双曲線軌道
公転周期と振動周期による軌道はこのようになります。
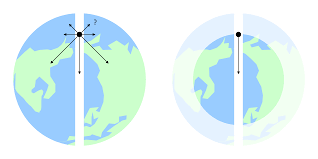
地球トンネルって、知ってますか。
地球にトンネルを掘っていって、
地球の裏側まで貫通する仮想のトンネルのことです。
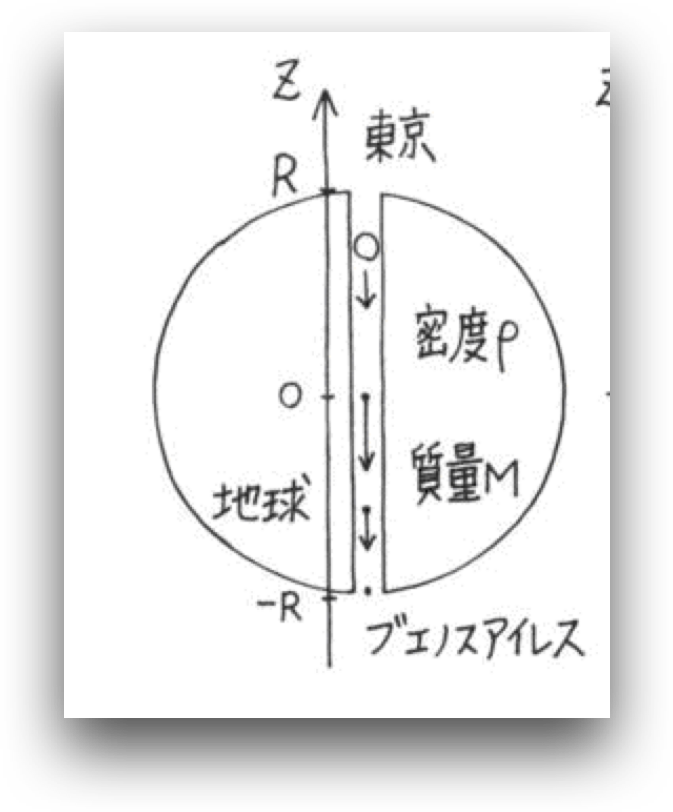
こんな感じのトンネルです。
このトンネルに、ボールを落としたらどうなるかって、
仮想実験なのですが、
上の例だと、東京からブエノスアイレスまで、
トンネルを掘って、ボールを落としたら、
往復で、どこのくらいの時間がかかると思いますか?
なんと
84.4分です。
これは、大学の試験にも出題されますが。
これをどうして計算したのかという話をしたいと思います。
以下は、この愛読書からの説明です。
他のインターネットなども同じような説明なので、
ネタバレさせてください。
まずは、万有引力です。
地球の中心からzkmの位置の万有引力です
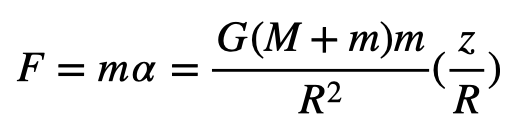
この上の式は、距離Zによって、万有引力が変わり、
z以外は固定なので、z以外を、バネ定数kと置いて
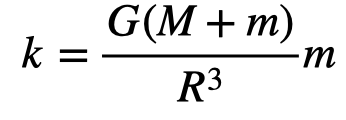
このように、バネ定数を表すことができます。
よって、角速度は、
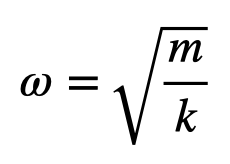
となります。
これから、84.4分が算出されます。
気になる方は、計算してみてください。
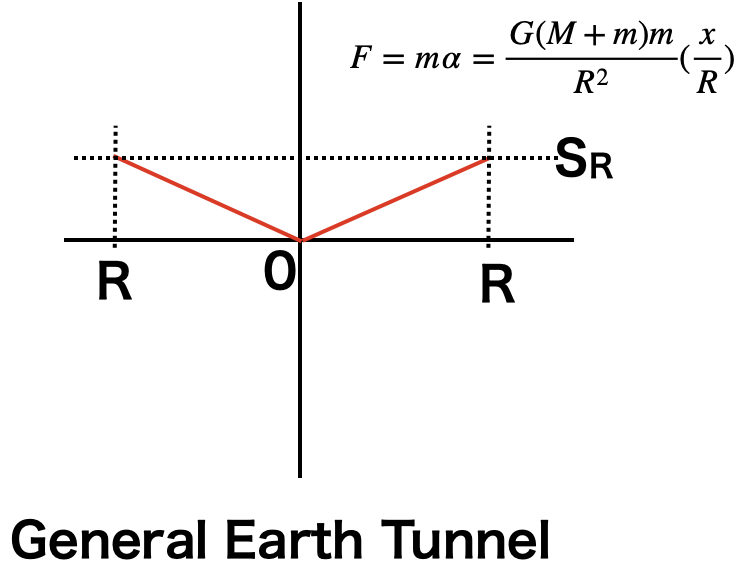
万有引力をグラフにすると、こんな感じです。
地球の中心で万有引力が0になり、
距離R(例えば地球の半径=6380km)
ではFにRを代入した結果になります。
しかし、考えてみると、なんで地球の中心で
万有引力が0になるのでしょうか?
そこで、静的エネルギー(S)で考えてみることにします
ここからは、自論です。
まず、地球の表面(中心から6380km)にボールがあったとします。
もちろん既に、地球トンネルが掘られているとします。
地球の表面のボールのあるところの静的エネルギー(SR)は
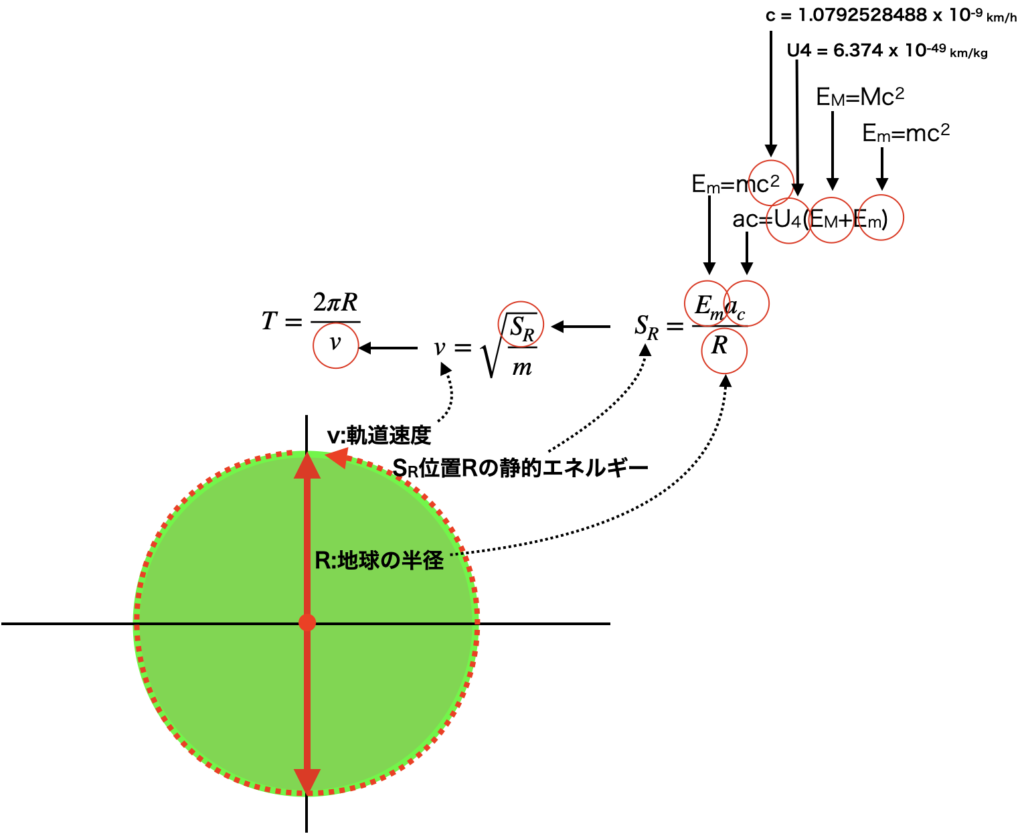
こんな感じで求められます。
しかし、ボールが持っている動的エネルギーは0です。
すでにお気づきかもしれませんが、
その静的エネルギーが動的エネルギーに供給されるシステムです。
静的エネルギー(S)と動的エネルギー(Vx)が保存されるエネルギーです。
注意しなければならないのは、
楕円軌道のシステムとはシステムが違います。
すなわち、
こんな感じで、地球の中心の動的エネルギーが、
最大(SR)となります。
つまり、速度が最大となります。
前の万有引力を使った考え方は、
静的エネルギーの話で、
エンディの理論は、ボールの動的エネルギーの話です。
どちらも、周期は84.4分になりますが、
個人的には、ボールの動的エネルギーを使った考えの方が良いと思います。
みなさんはどうでしょうか?
地球トンネルから楕円軌道
ところで、
このことを考えているうちに、
自分が考えている、楕円軌道は、円軌道+単振動の
理論の単振動の部分は、
この、地球トンネルが応用できるのではないかと考えました。
いままで、振幅が円軌道を中心に同じ距離で振動していることが、
いまいちわかりませんでした。
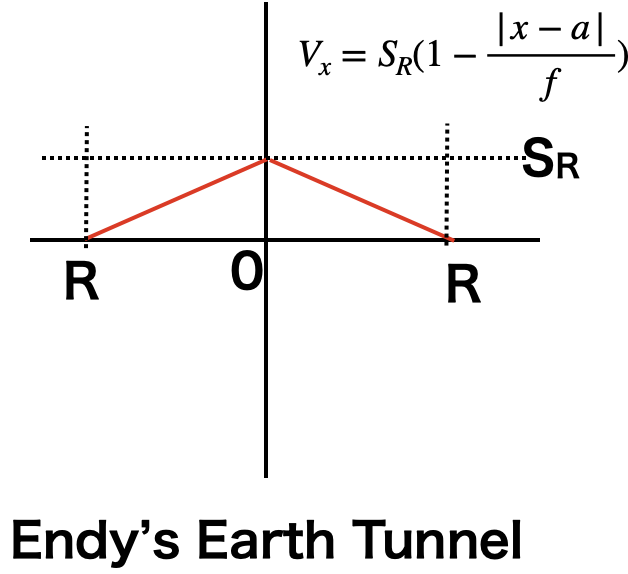
しかし、Endy’s Earth Tunnelの図をみると、
0の部分が、基準軌道(a)とすると、
振幅がRの単振動がおきます。
なので、基準軌道aを中心に振幅Rの単振動が起きます。
近点で衝突した時の遠点の位置、
遠点で衝突した時の近点の位置
は、この現象で決まるとういうことがわかりました。
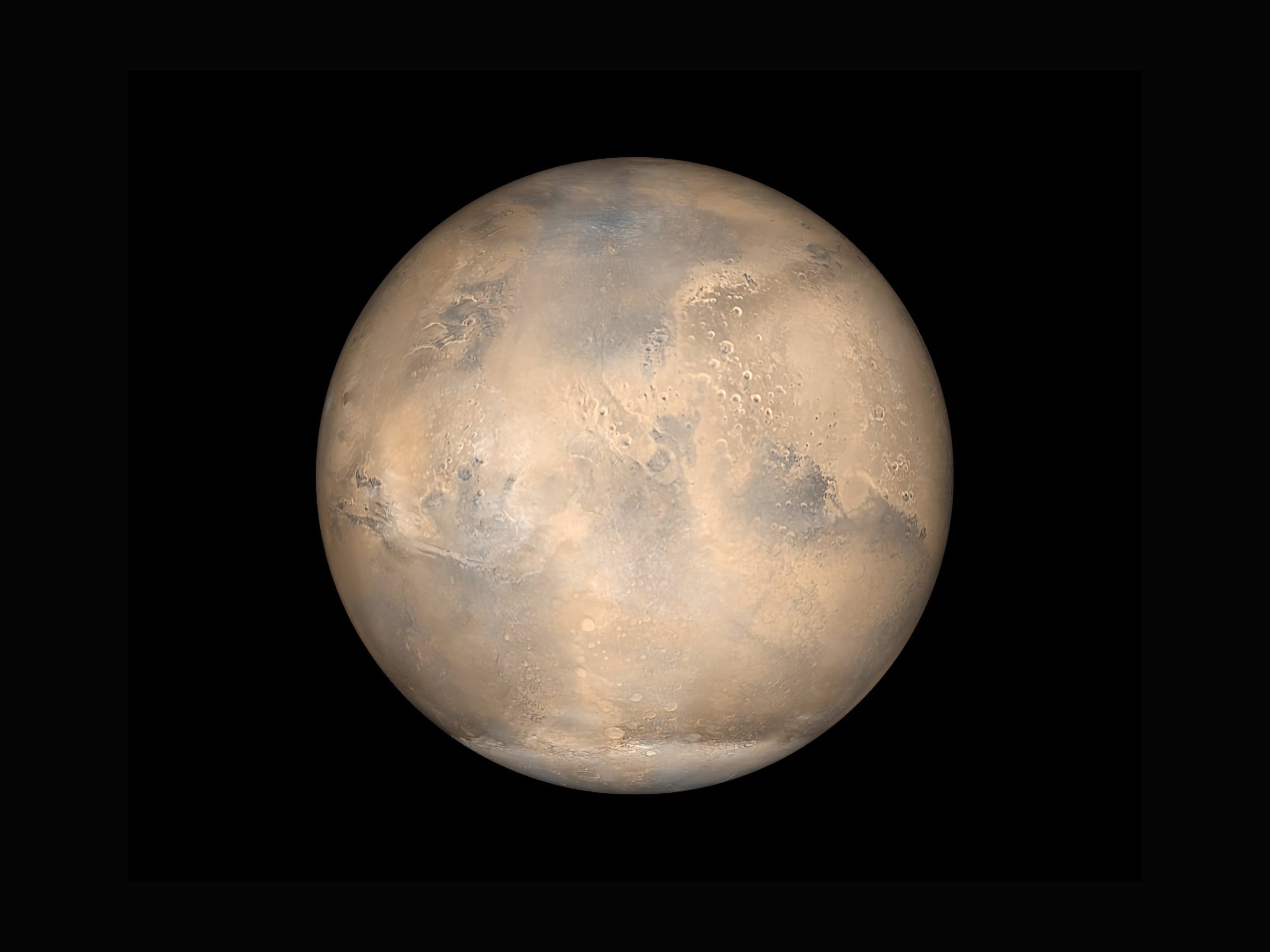
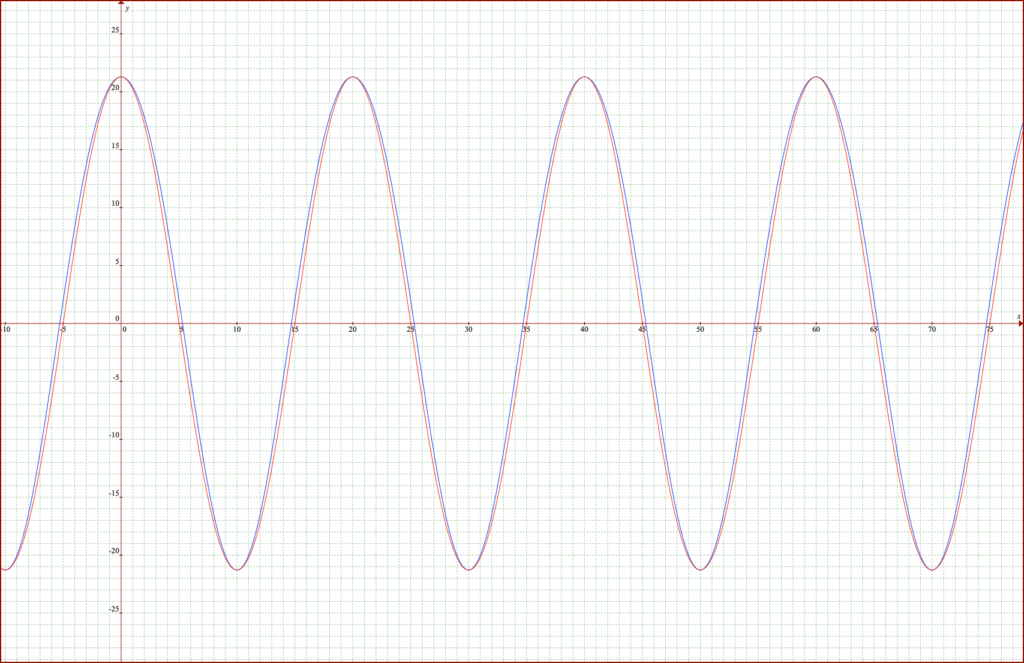
楕円軌道は、円軌道+単振動としています。しかし、厳密にいうと違います。
どのくらい違うかというと、火星の軌道でいうとこのくらいです。
・青線が楕円軌道、
・赤線が円軌道+単振動
になります。
ごくわずかといえばわずか、大きいといえば大きいです。
水星の軌道では。
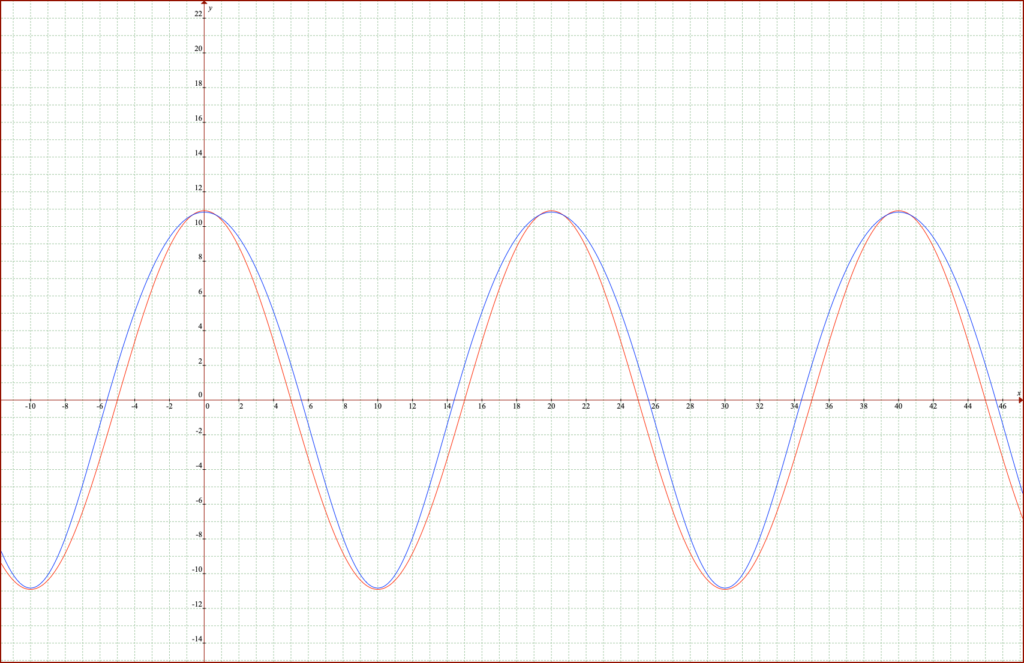
こんな感じです。
だんだん、違いが大きくなってきました。
でも、これくらいならいいかなってところですが。
さらに、ハレー彗星のような、長周期の軌道では、
楕円軌道と円軌道+単振動は全く別物です。
ということは、
楕円軌道って円軌道+単振動じゃないじゃないか。ということになります。
その通りです。これで、楕円軌道+単振動の理論は崩壊か〜
いや少し、待ってください。
完全な単振動では、ないけれども、基準軌道(a)を中心に、振幅(f)で振動していることは間違いありません。
そこで、極座標で中心天体から、周回天体までの距離rを長半径a、短半径b、焦点距離f、角度θで表すと、
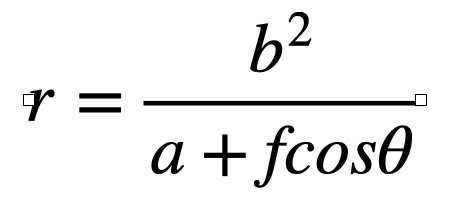
となります。
よくある式は、離心率ε = f / a と 半直弦l=b2/aを使って
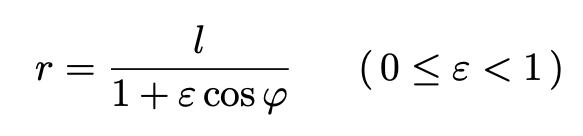
ですが、あまり、離心率と半直弦が好きでないので、
a,b,fの式にしました。
好き嫌いかよってことですが、好き嫌いです。(笑)
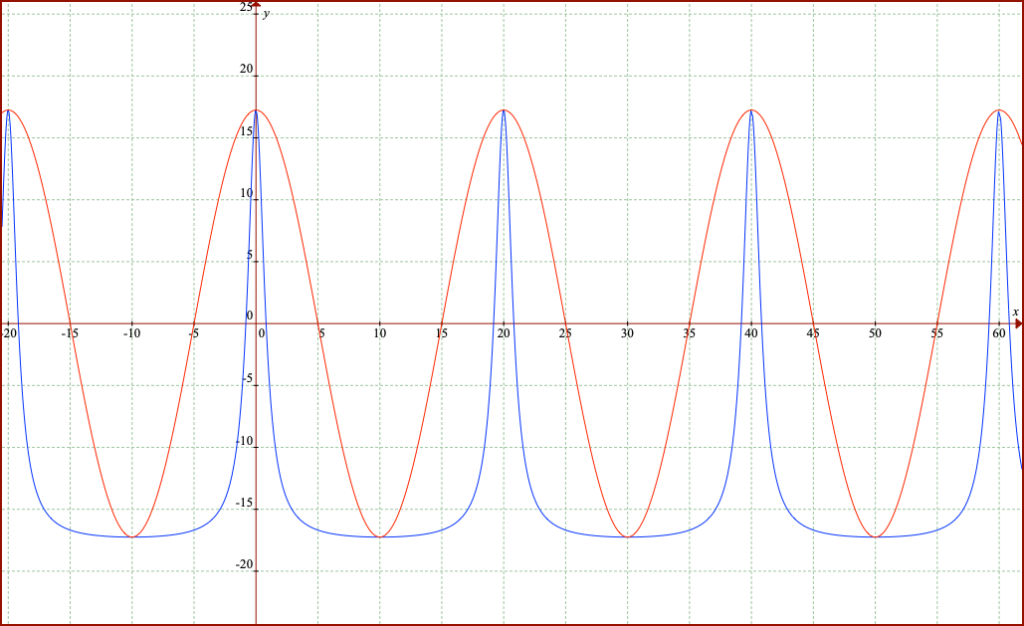
本当は、a+fcosθが、円+単振動になっているからです。
これは、曲座標(r)は、普通の単振動ではありませんが、周期は単振動と同じです。
ふつうの単振動と違う理由は、静的エネルギーの大きさが、距離に反比例して変化するからです。
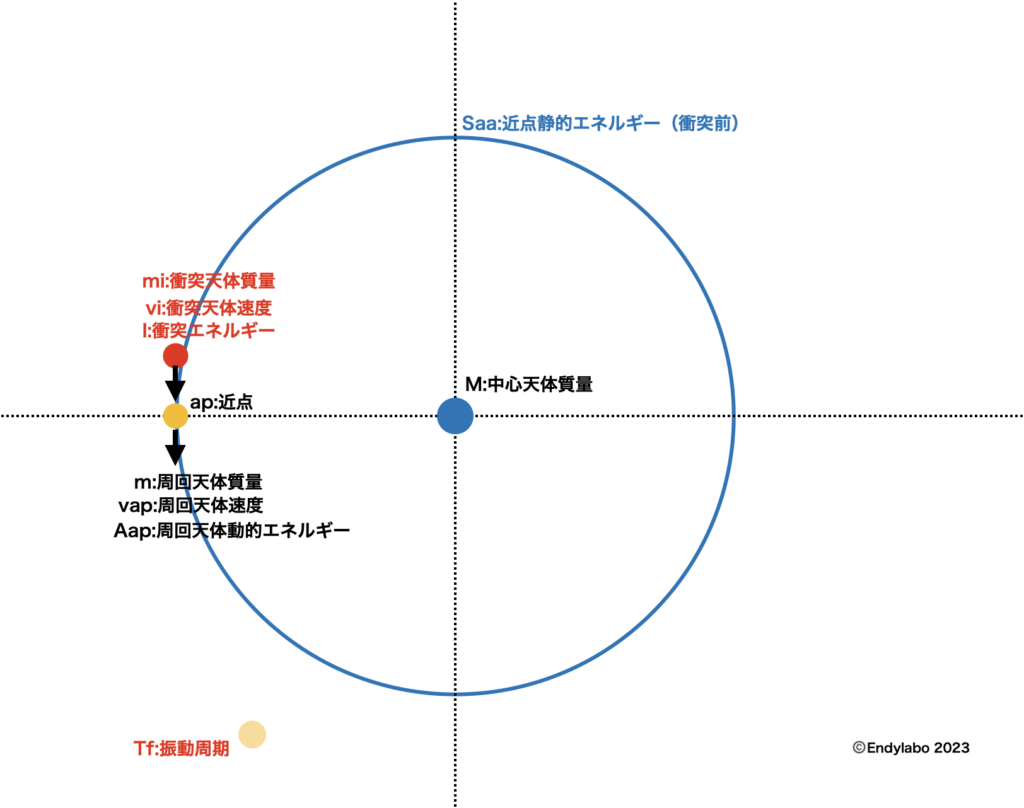
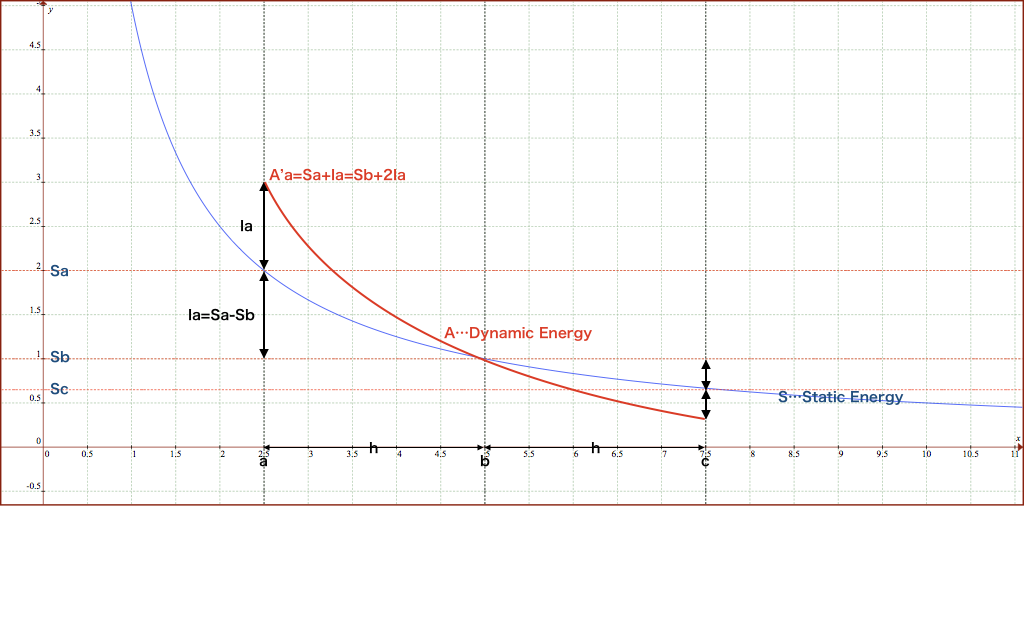
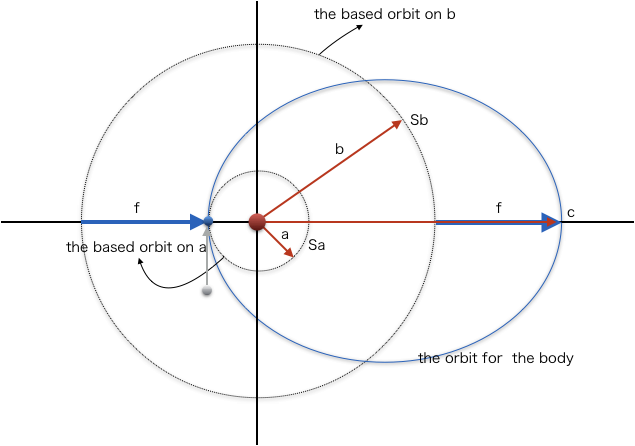
次の図をみてください。
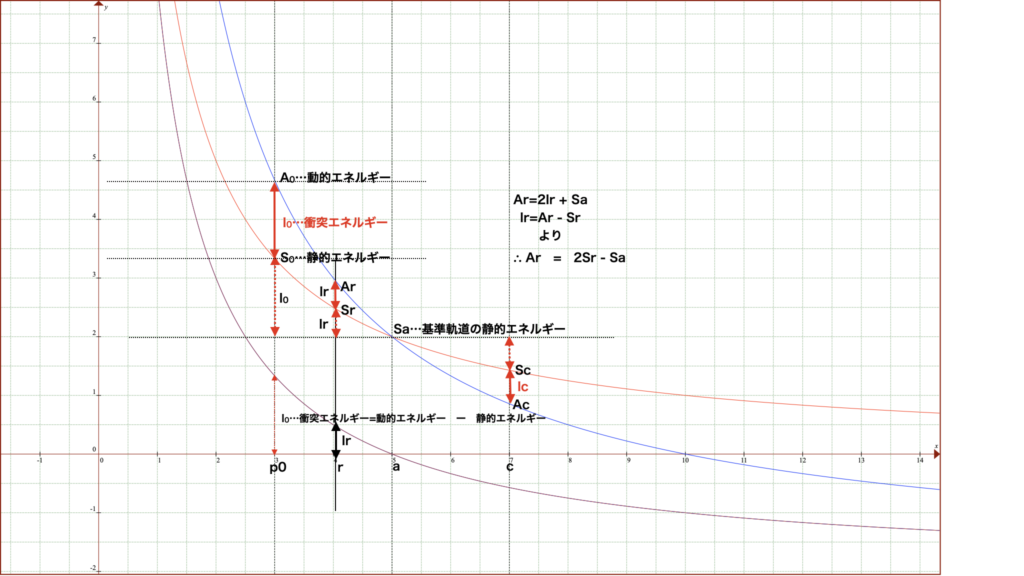
位置(P0)の衝突で増えた衝突エネルギー(I0)は、
動的エネルギー(A0)と静的エネルギー(S0)の差(A0 ーS0)になります。
そして、衝突した時の衝突エネルギー(l)=0になる点が、周回天体の鎮座する位置(a)です。
例えば、任意の位置(r)では、動的エネルギー(Ar)は、図より、
Ar = 2Sr -Sa
と表されます。
これは、衝突エネルギーと同じ大きさの反対のエネルギーが
(これは、力の作用反作用を模して作用反エネルギーとでもいいましょうか)
安定する場所(静的エネルギー)に対して、働くからです。(言い切る)
そして、動的エネルギーは、近点(Po)で最大で速度が速く、
遠点(c)で最小で速度は遅くなります。
このエネルギーの変化によって、周回天体は、楕円軌道上を動くことになります。
これは、なんとかして、周回天体は居心地のいい場所に行こうとするからです。(再び言い切る)
そこで、楕円の極座標(r)を円軌道+変形単振動で表してみることにします。
変形単振動は。中心天体からの距離で変化する、
静的エネルギーの差を考慮した単振動という意味です。(本来の単振動ではないけど)
楕円軌道の極座標
の式から、角度θによる、振幅(fθ)を算出したいと思います。
ここで、この式はθ=0の時に近点になるので、
θ=0の時に遠点にしたいので、(個人的理由なので、このままでもOKです)
分母をa-fcosθにします。
振幅(fθ)は、中心星から周回天体までの距離(r) から基準軌道(a)を差し引いた(r – a)いいので、
となります。(計算してみてください。b2 = a2 – f2を使います)
になり、円軌道と周期的に変化する振動になります。
これが、下図のように、楕円軌道の極座標になります。
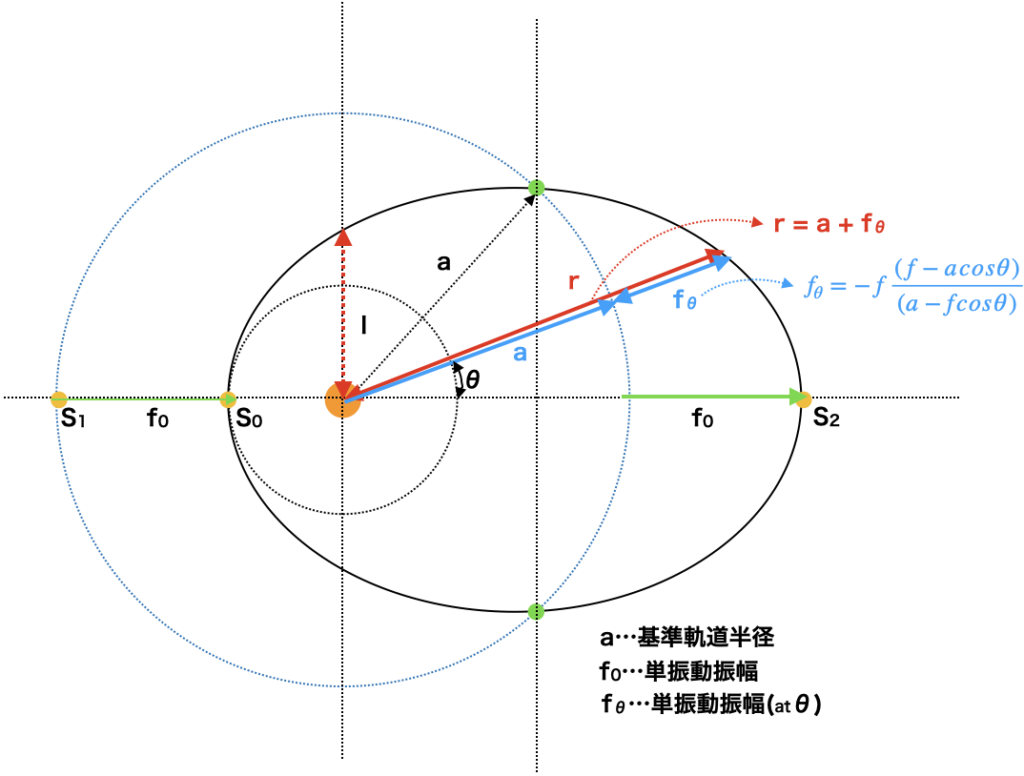
結論
このように、周回天体は、鎮座する位置を求め、
静的エネルギーとバランスをとりながら、楕円軌道上を動きます。
ということです。(これはあくまでも個人的意見です。)
運動エネルギーと位置エネルギーによる楕円運動
高校の物理で運動エネルギーについて習った。それは

m:質量、v:速度 と習った。これは、楕円軌道やホーマン軌道を求めるとき、また、位置エネルギーと運動エネルギーの保存などで使った。次に「ほーマン軌道」の時のエネルギーバランスの式がwikiに載っていたので、掲載する。

等号式の真ん中が、右側第1式が「天体など」の運動エネルギー、第2式が任意の位置rの位置エネルギー、一番右の等号の右側の式が長半径の2倍の位置の位置エネルギーでそれと、先ほどの運動エネルギーと位置エネルギーを加えたエネルギーと等しくなるという式である。なんとなく意味はわからないではないが、なぜ、長半径の2倍位置の位置エネルギーと等しくなるのかがよくわからない。
そもそも、天体の進行方向の運動エネルギーは

なのかというところも、宇宙エネルギー構造からすると疑問である。
宇宙構造からの楕円軌道
そこで、宇宙エネルギー構造を元に解釈してみる。そもそも、楕円軌道は、私の仮説ではあるが、衝突により楕円軌道になっている。その衝突エネルギーの分衝突位置でのエネルギーが増えるので、そのエネルギーを使って静的エネルギーとバランスする位置まで移動して、鎮座するというのが私の理論である。
衝突エネルギーをI、位置aでの静的エネルギーをSa、位置aでの動的エネルギーをAva、鎮座する位置をbとすると、任意の位置rの静的エネルギーをSr,任意の位置rの動的エネルギーをAvrとすると、位置aでの静的エネルギーと動的エネルギーはバランスしているので、Sa=Avaの状態です。そこに、衝突天体が衝突エネルギーIで衝突すので、動的エネルギーはA’va = Ava + Iとなります。つまりA’va = Ava + I = Sb+ 2I、Sa – I =Sbとなります。任意の位置rでは、A’vr = Sr + Ir、Sr – Ir = Sbとなります。このことから、A’vr + Sb = 2Srとなり、鎮座します。このことから、位置bの静的エネルギーSbは(基準軌道=中心天体から長半径の距離(b))Sb = 2Sr – A’vrとなります。
wiki の式は。位置rの運動エネルギー+位置rの位置エネルギー=長半径の2倍の位置の位置エネルギー Kr + Pr = P2b
私の式は、衝突後の基準軌道位置bの静的エネルギー = 位置rの静的エネルギーの2倍 – 位置rの静的エネルギーとなります。Sb = 2Sr – A’vr
さらに、移動後の基準軌道bは、Sb = 2Sa – A’va = Sa – I より b=EA/(Sa – I) となります。EAは面積エネルギーで、光速時静的エネルギーScと光速時基準軌道半径acより、Sc x acです。
ホーマン軌道(Wiki)
Wikipedia “Hohmann transfer Orbit” より引用
For a small body orbiting another much larger body, such as a satellite orbiting Earth, the total energy of the smaller body is the sum of its kinetic energy and potential energy, and this total energy also equals half the potential at the average distance a (the semi-major axis):
Solving this equation for velocity results in the vis-viva equation,

where: