HPを立ち上げて、一年たちました。
おめでとう!!パチパチ
と言っても、広報を全くせずにいるので、統計は地を這いずっているような状態ですが。
これまでに、書いたブログは40ブログで月平均3から4本と言うところです。
内容は、宇宙のことが多いので、読者は限られてしまいますが。さらに式が多くてとても読む気にならん。と言うご意見もあります。ごもっとも。
あのホーキング博士が言っていた。式が多い本は売れないと。結局、専門家でなくても読める形にしないと、広まらんぞお。とおっしゃっていました。
しかし、段々物忘れがひどくなってきている昨今(生まれつきかもしれんが)何かに残しておかねば、忘れてしまうのですよ。ノート代りかな。
自分が作った「調和理論」は引力や重力を否定する理論で、これがまた受けない。だって全世界の人口76億人のうち、2、3人しかそんなこと考えていないと思う。全くニッチな理論です、
でも、コペルニクスの地動説のように、そのうちに受けいれられる時がくる日を信じて、勤しんでいるわけです。
調和理論
「調和理論」の発想の発端は。「猫のチャーが坊さんの座布団に鎮座した」ことを発端にしています。チャーにとって坊さんの座布団の上が一番気持ちいいのでしょう。チャーを月に置き換えてみたら、月は今居るところが一番居心地がいいのではないかと。とすると、もしかして、月は自分の意思で今の軌道を選んでいるのではないかと思ったわけで。巷に溢れている、自走するロボットのように、そう、丸いルンバのように。そう思っただけで、ルンバが月に見えてくる。ルンバは最後は充電器に自分で戻ります。すごいなあ。時々掃除を挫折して、赤ランプを点滅して止まっていることもありますが。
月は外部の力で動いているのではなくて、自分自身で動いて今の場所に居るとすれば、どんなメカニズムなんだろうと考えてみたわけです。
それを考えてみたときに、全ての力はバランスするはずだ。と言うことを思い出した。あの作用反作用の法則です。物を紐をつけて振り回すと、物自体は遠心力と向心力でバランスします。しかし、引っ張っている人は、物を回した時の紐の引っ張る力と人を止めておく靴の摩擦力がバランスして、人は止まって回すことができます。
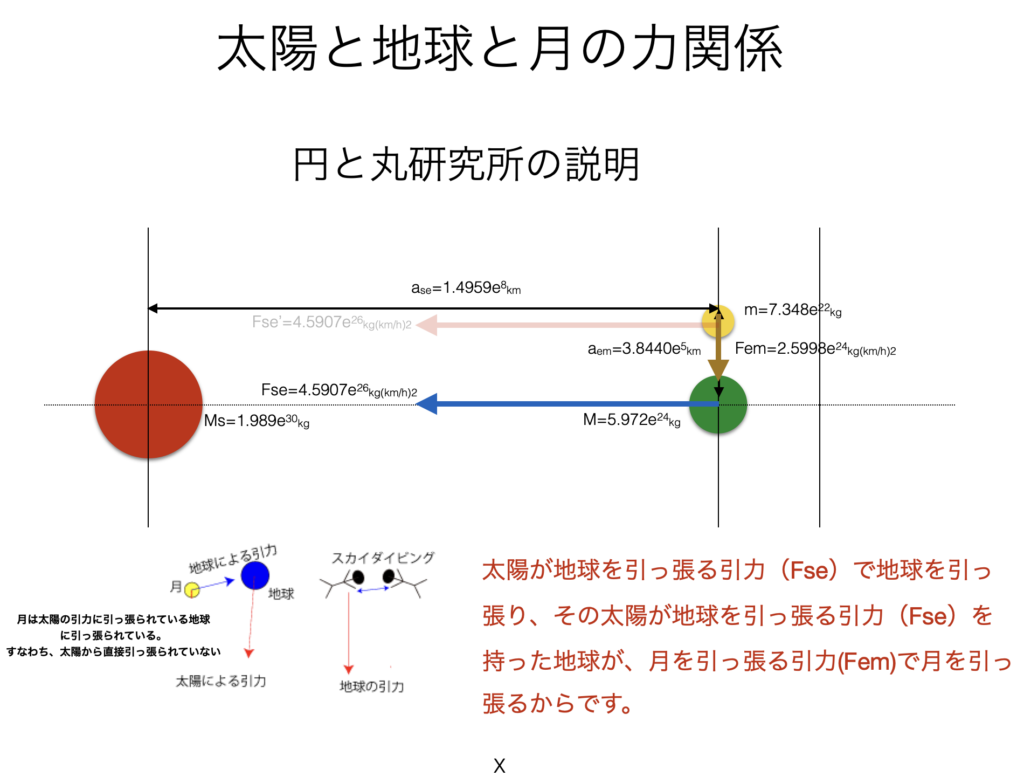
しかし、宇宙空間では、靴の摩擦力はないので。例えば、地球と月が版引力という紐で繋がっているとすると、いつしか地球と月はぶつかるはずです。確か、宇宙ステーション(ISS)で野口さんがタオルかなんかで綱引きをした映像がありました。結果は、二人で引っ張ると二人ともぶつかっていました。
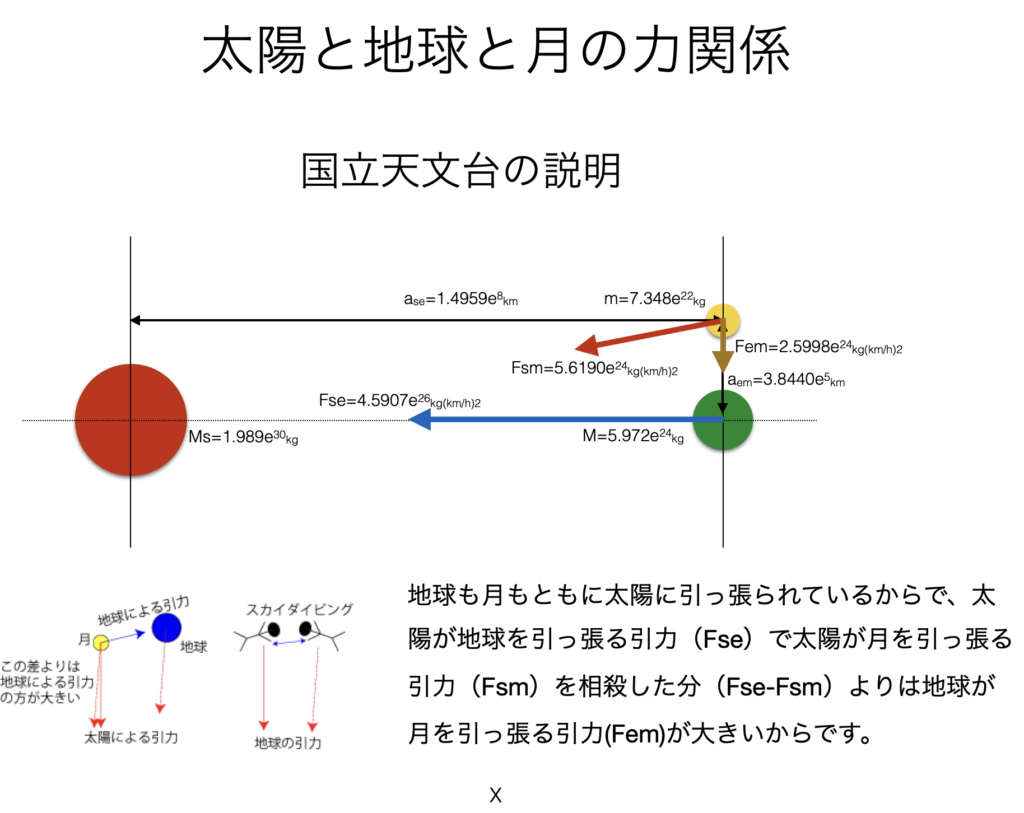
ニュートンの万有引力は地球が月に引っ張られ、地球が止まっていられるところが曖昧なんです。ニュートンも分かっていたようです。
そこで
そこで、考えたのが、ルンバちゃん方式。月が自走するいうことです。自走ってどうやってと聞きたいと思いますので、簡単に説明しましょう。
月は居心地の良いところは決まっています。だから、そこにいればお茶を飲んでボーとしていられます。そこは全ての力がゼロのところです。(一般的には無重力と呼んでいますが)しかし、力で考えると地球を止める力がないので、地球が近づいてきてしまいます。また、力で考えると、地球から月へ力がどの速度で伝わるのかなんてことも考えなくてはならなくなります。
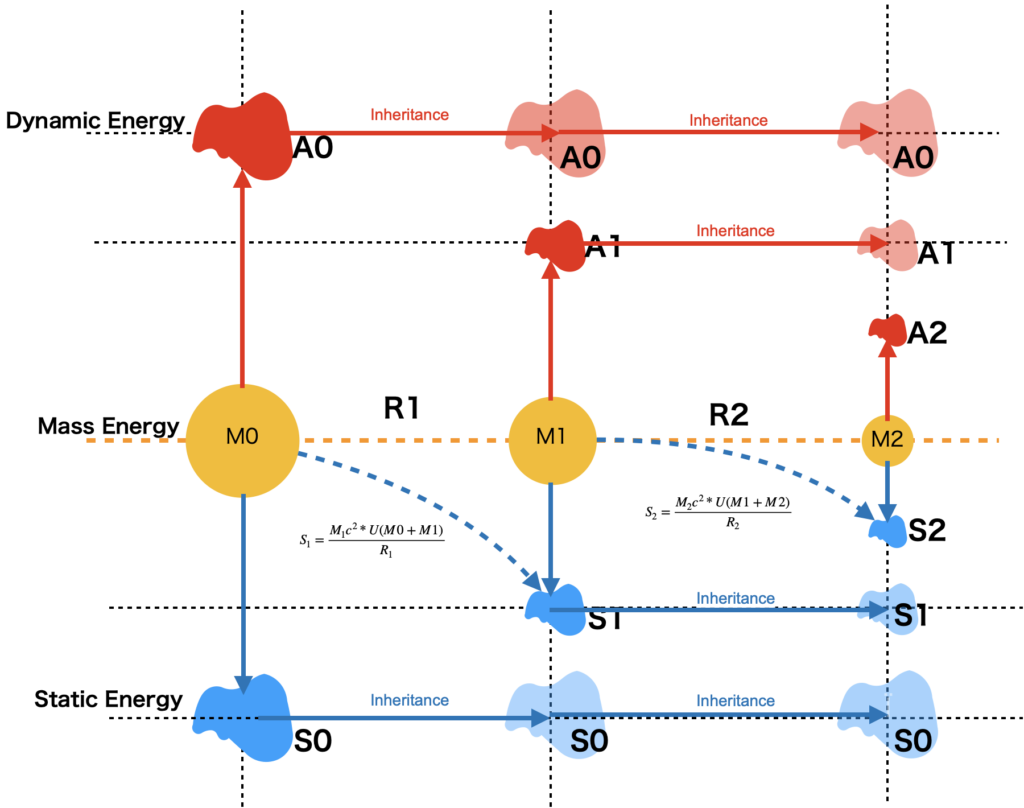
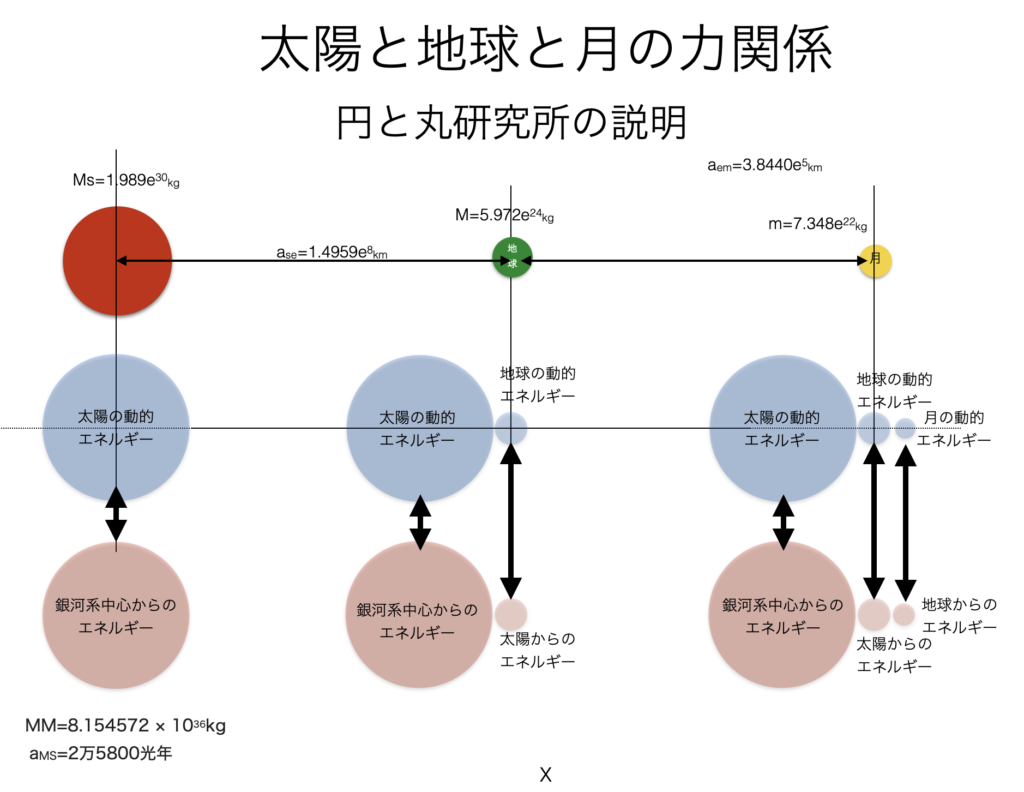
そこで、月自身が保持していて、その3つのエネルギーのバランスで月が移動すると言う方法を考えました。
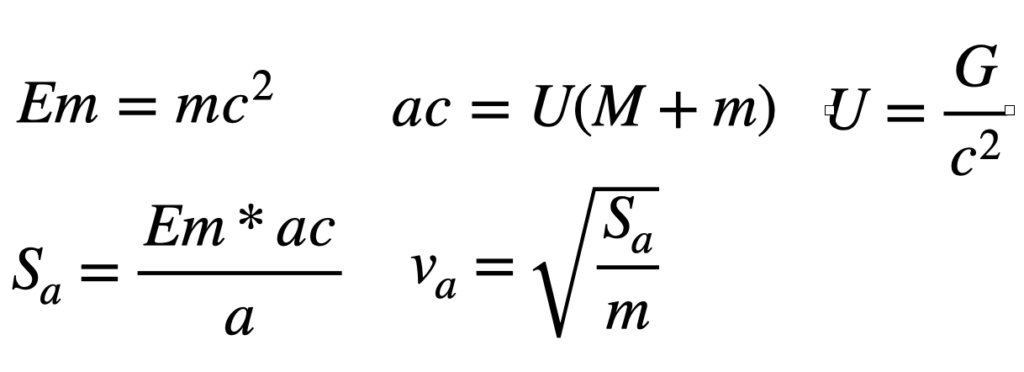
まず、一つめは、月自体のエネルギーです。宇宙空間において、物体が存在すると宇宙空間とのエネルギーとバランスする「質量エネルギー」というものです。それは、宇宙空間と月自身が存在することでバランスするエネルギーです。物体には、宇宙空間から供給されます。その分宇宙空間からエネルギーが減ります。この質量エネルギーは、アインシュタインの有名な誰でも知っている、エネルギーと質量と交換できる式E=mc2になります。(アッ式を描いてしまった。)
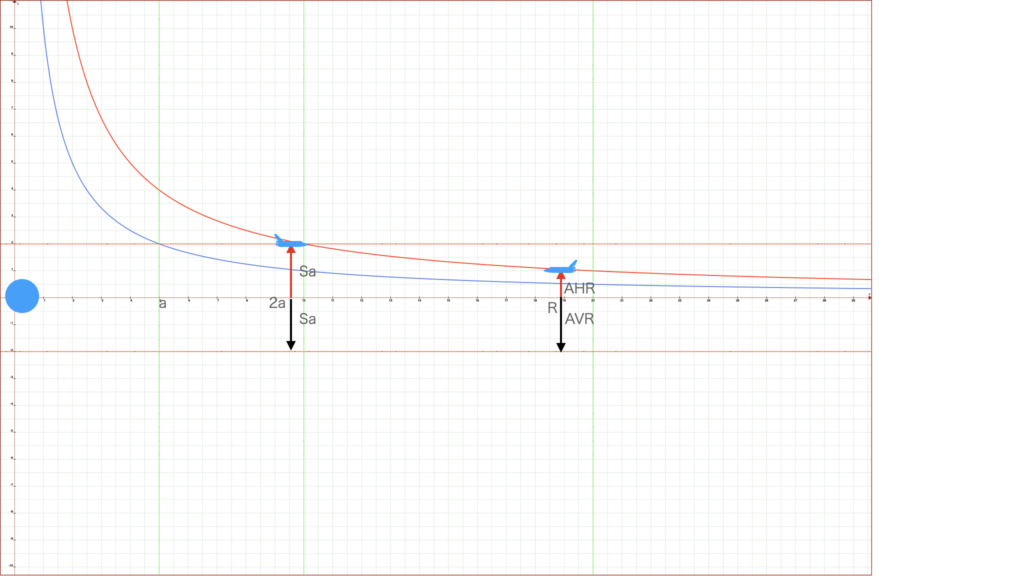
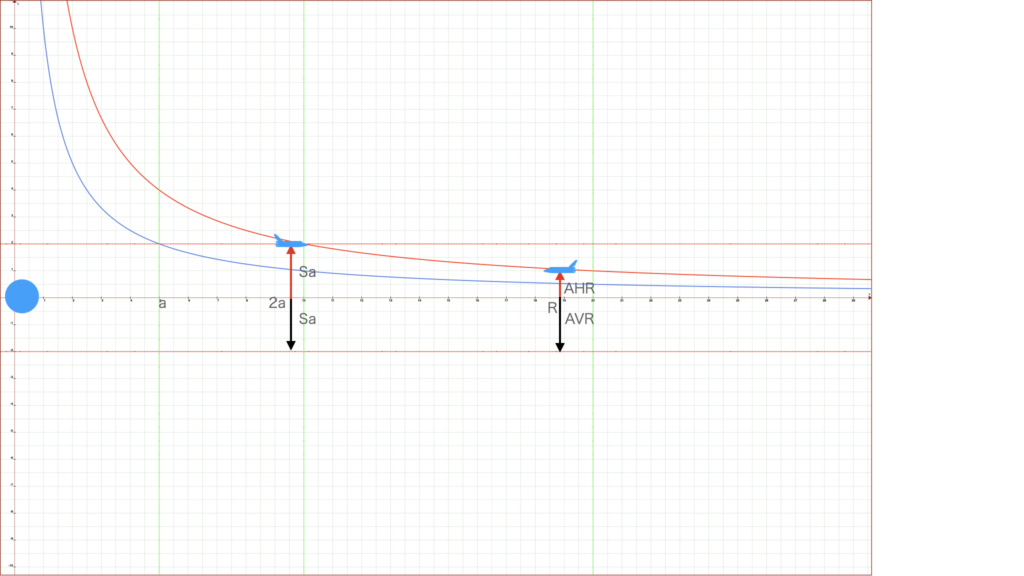
このエネルギーは、地球と月の場合、地球(大きなエネルギーをもった物体)から月(小さいエネルギーを持った物体)に流れます。まあ供給されますって感じです。静的エネルギーの最大は、月の質量エネルギーです。質量エネルギーが最大の時の距離は、光速時の軌道半径になります。ブラックホールの半径になります。このエネルギーは、2物体間の距離に反比例して段々小さくなります。
これを静的な距離によって決まるので「静的エネルギー」と呼ぶことにしました。この静的エネルギーが供給されると、月は地球の方に落ちていってしまいます。
そこで、物体が持っているもう一つのエネルギーは、運動すると発生するエネルギーです。速度の2乗に比例して大きくなります。
これは、速度によって決まるので、「動的エネルギー」と呼ぶことにしました。
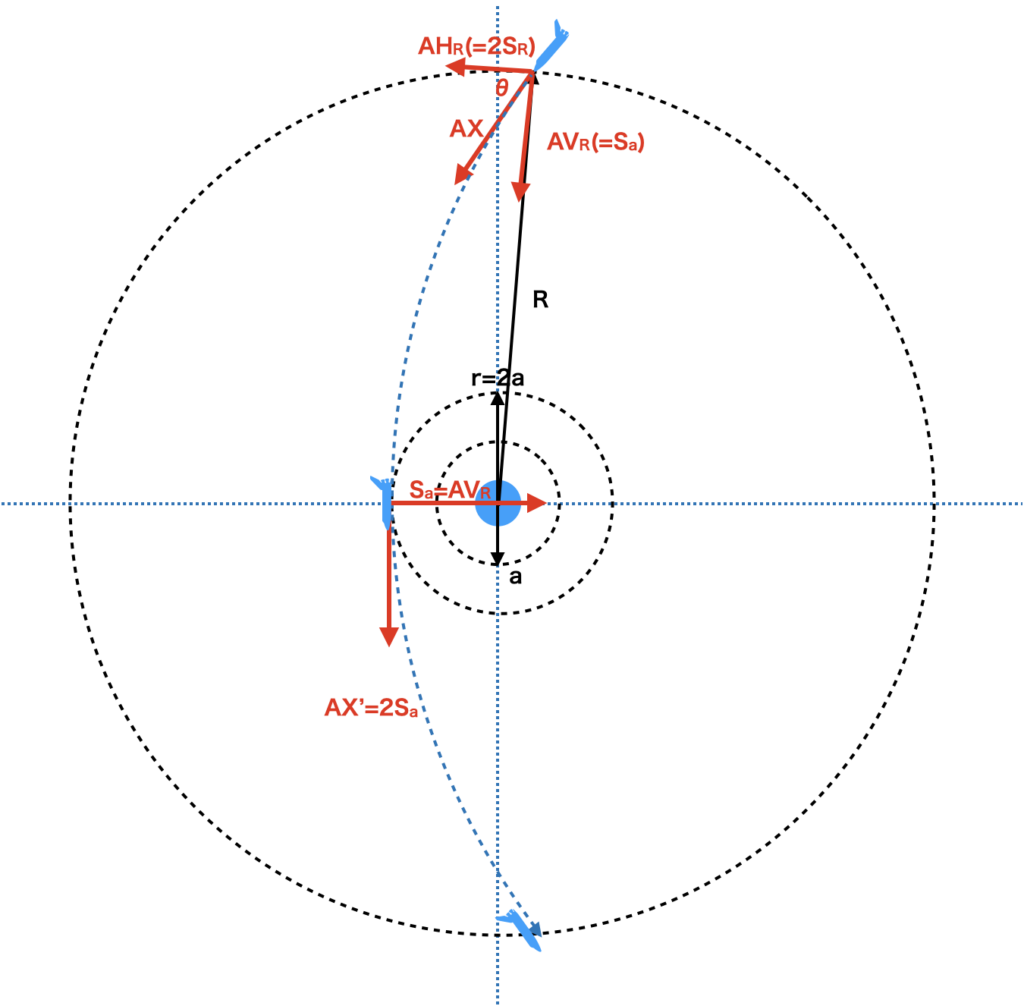
この静的エネルギーと動的エネルギーがバランスする位置が、月にとっての坊さんの座布団になります。
このエネルギーは、月自身が保有していています。
もしもバランスが崩れたら
座布団の位置が移動します。おー座布団が移動するんですよ。猫のチャーならすぐ座布団に座りにいくだろうな。月も同じなんだよな。座布団を追って、月がトコトコ動くんですよ。
そう、座布団はどんな場合も、月が一番居心地の良い場所に移動します。月はその座布団に向かって、動的エネルギーを調整します。例えばバランスしている位置の動的エネルギーより I だけ動的エネルギーが増えたとしましょう。そうすると、今いる場所の座布団の位置の静的エネルギーより、I 減った静的エネルギーの位置が居心地がいい場所になります。そしてその位置でバランスするように月が移動します。
これが調和理論の一つです。
とりあえず、今日はこの辺で。
では