前に、「双曲線軌道ついにわかった!」というブログをかきましたが、
その時に、具体的な例を載せますと言って、載せてなかったので、
載せることにしました。
中心星は「木星」として、木星から距離Rのところで、木星の影響圏に入ることにします。
そして木星から、距離aのところで「最近点」となり再び距離Rのところに戻っていく設定にします。
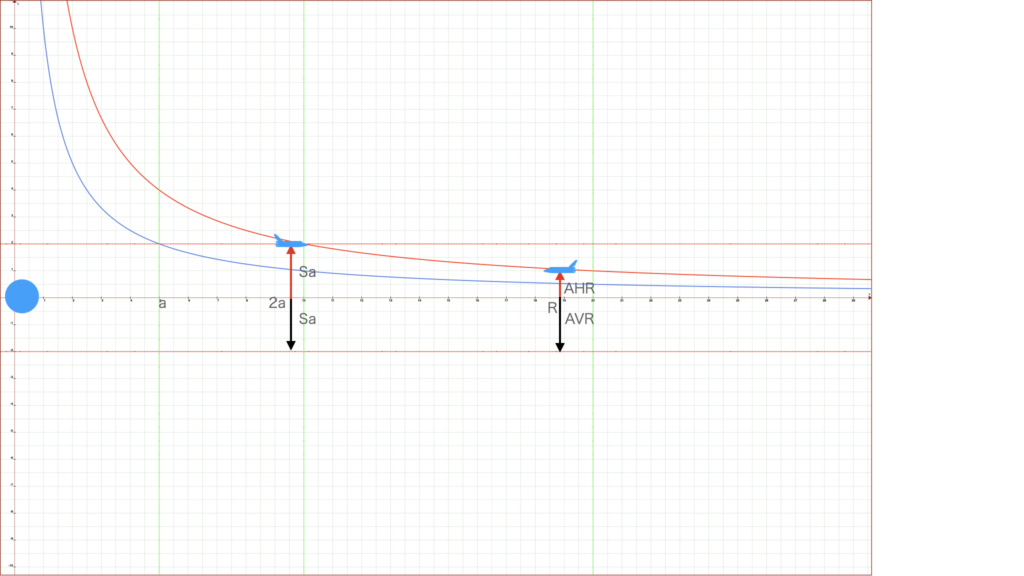
エネルギー分布図(下図)は、赤線が脱出境界(静的エネルギーの2倍)青線が静的エネルギー曲線になります。
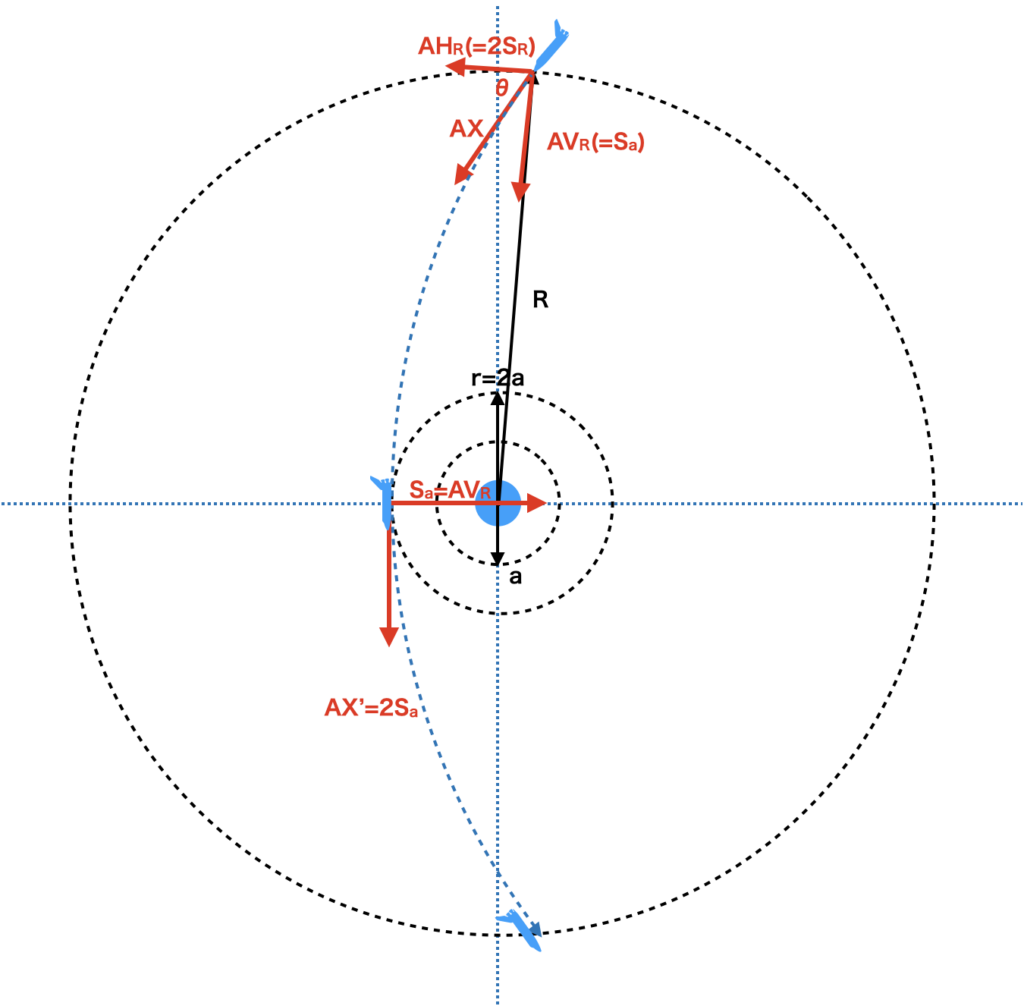
動的エネルギーAXで影響圏に突入したとします。
AHRは、影響圏境界Rの円軌道方向の成分の動的エネルギー、
AVRは、影響圏境界Rの木星に向かってている成分の動的エネルギーになります。
ロケットの動的エネルギーは、
AX = AHR + AVR
になります。
ロケットは、木星の影響圏に入り、影響圏境界で、
水平静的エネルギー(AHR)は,木星からの距離Rの静的エネルギー(SR)の2倍(第二宇宙エネルギー)になるので、
AHR = 2 x SR
となります。
垂直方向の動的エネルギー(AVR)は、
AVR = AX – AHR
になります。
AVRはaの基準軌道の静的エネルギーSaと同じになります。
(双曲線の惑星から距離rの動的エネルギー(AX)は、AX=2Sr+Saと表されるので)
Sa = AVR
最近点2aでは、AXが加速してAX’になり、
Saとバランスするので、
AX’ = 2 x Sa
になります。
エネルギーの相関図はこのようになります。
これらを踏まえて、木星を利用したスウィングバイの双曲線軌道を計算してみます。
例 木星の影響圏内の双曲線軌道
<前提>
木星の質量(M):1.89813 x 1027kg
宇宙船の質量(mx):1.0 x 103kg
影響圏境界までの距離(R):1.45536 x 107km
進入速度(vx):6.8645 x 104km/h
AX = mx x vx2 = 4.71211 x 1012 je
<静的エネルギーの計算>
Emx = mx x c2 = 1.16479 x 1021 je
acx = U(M+m) = 0.00141 (U=7.42426 x 10-31 km /kg)
SR=Emx x (acx / R) = 1.12786 x 1011 je
AHR = 2 x SR = 2.25571 x 1011 je
AVR = AX – AHR = 4.48654 x 1012 je
Sa = AVR = 4.48654 x 1012 je
AX’ = 2 x Sa = 8.97307 x 1012 je
最近点 a = Emx x acx / Sa = 713,775 km
最近点速度 va = sqrt(AX’ / mx) = 94,726 km/h
進入角度 θ=acos(sqrt(AHR / AX))=77.36°
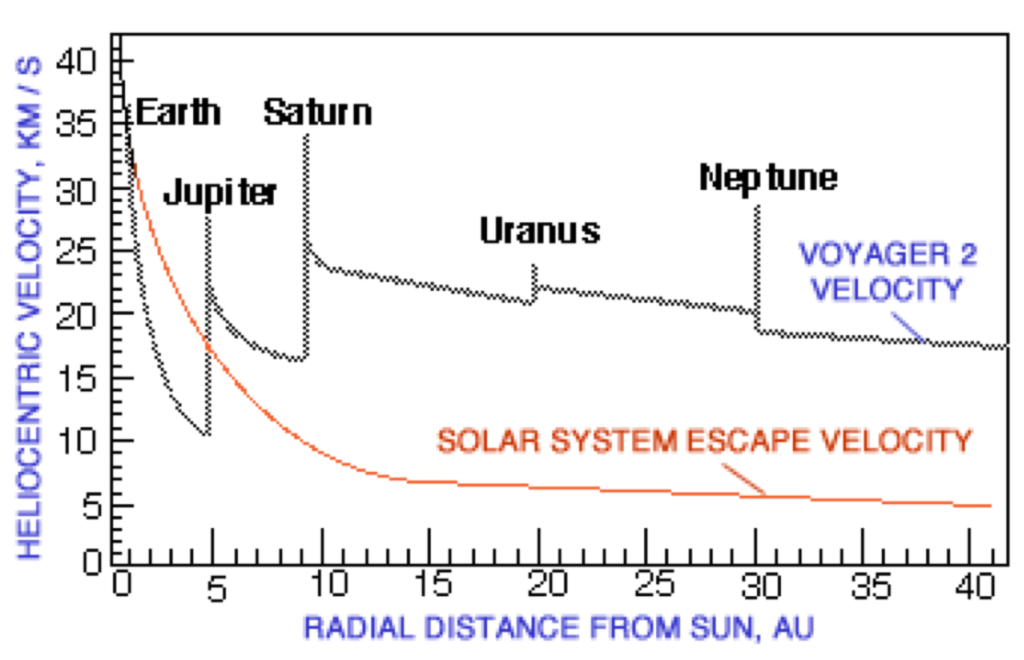
NASAのボイジャー2号のデータ
Voyager 2 Gravity Assist Velocity Changes
Voyager 2 leaves Earth at about 36 km/s relative to the sun. Climbing out, it loses much of the initial velocity the launch vehicle provided. Nearing Jupiter, its speed is increased by the planet’s gravity, and the spacecraft’s velocity exceeds solar system escape velocity. Voyager departs Jupiter with more sun-relative velocity than it had on arrival. The same is seen at Saturn and Uranus. The Neptune flyby design put Voyager close by Neptune’s moon Triton rather than attain more speed. Diagram courtesy Steve Matousek, JPL.
双曲線軌道ページは誤りがあるので、この方法で直そう!!