地球トンネル
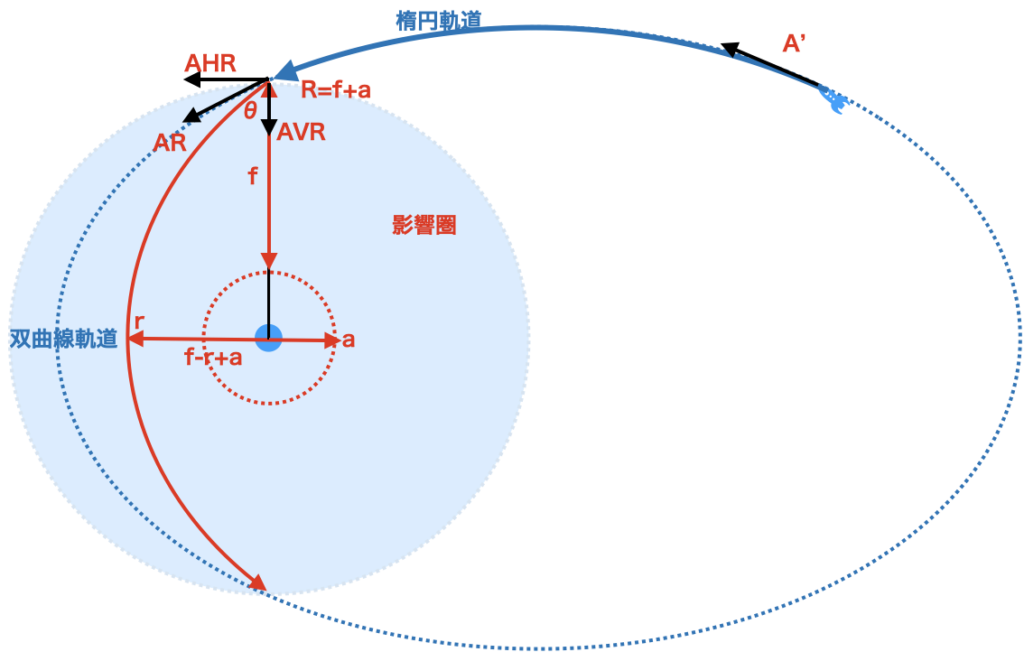
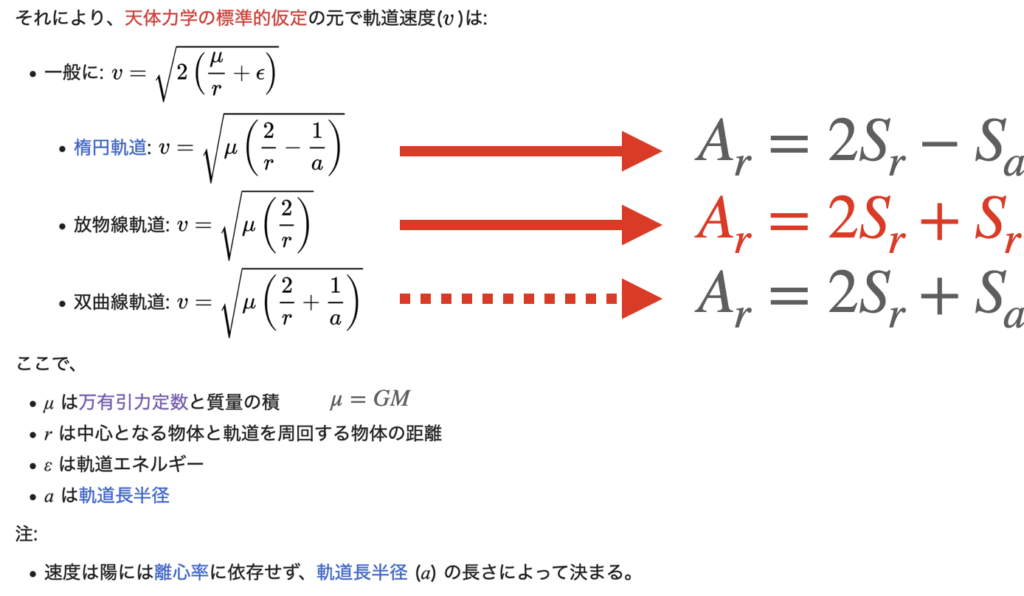
楕円軌道
放物線軌道
双曲線軌道
とりあえず、備忘労苦なので、詳細は後日

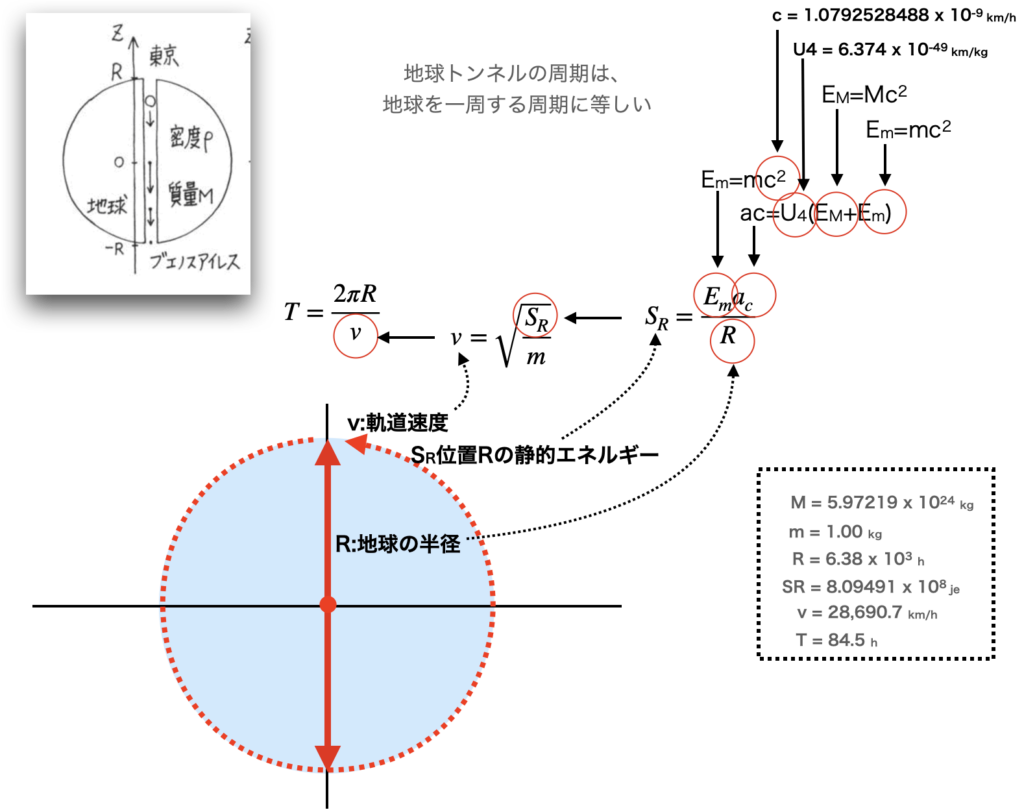
地球トンネル
楕円軌道
放物線軌道
双曲線軌道
とりあえず、備忘労苦なので、詳細は後日
こんな感じ
そして、こんな感じ
動的エネルギーは、こんな感じ
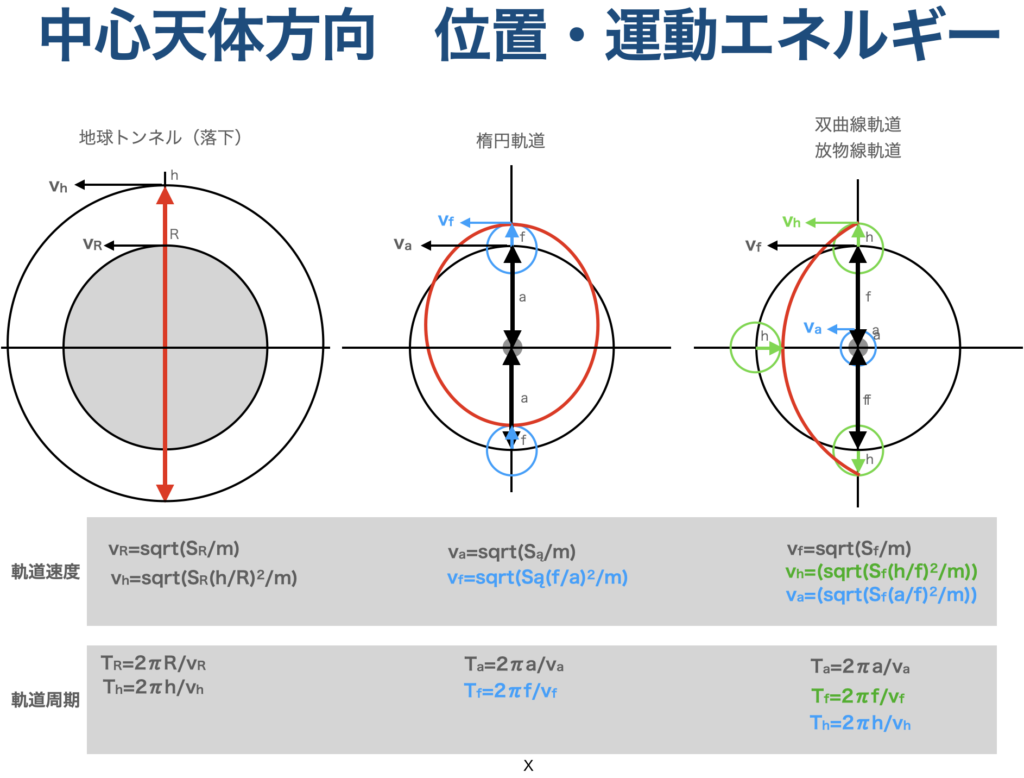
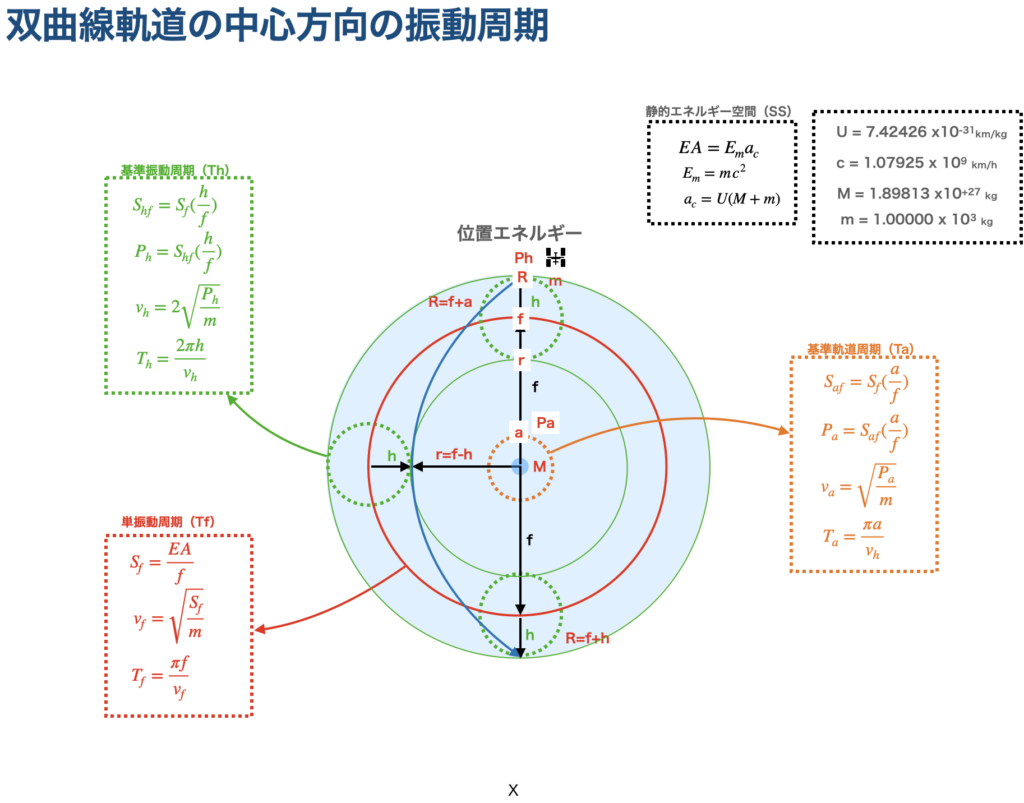
中心星方向の位置エネルギーと動的エネルギー
こんな感じ
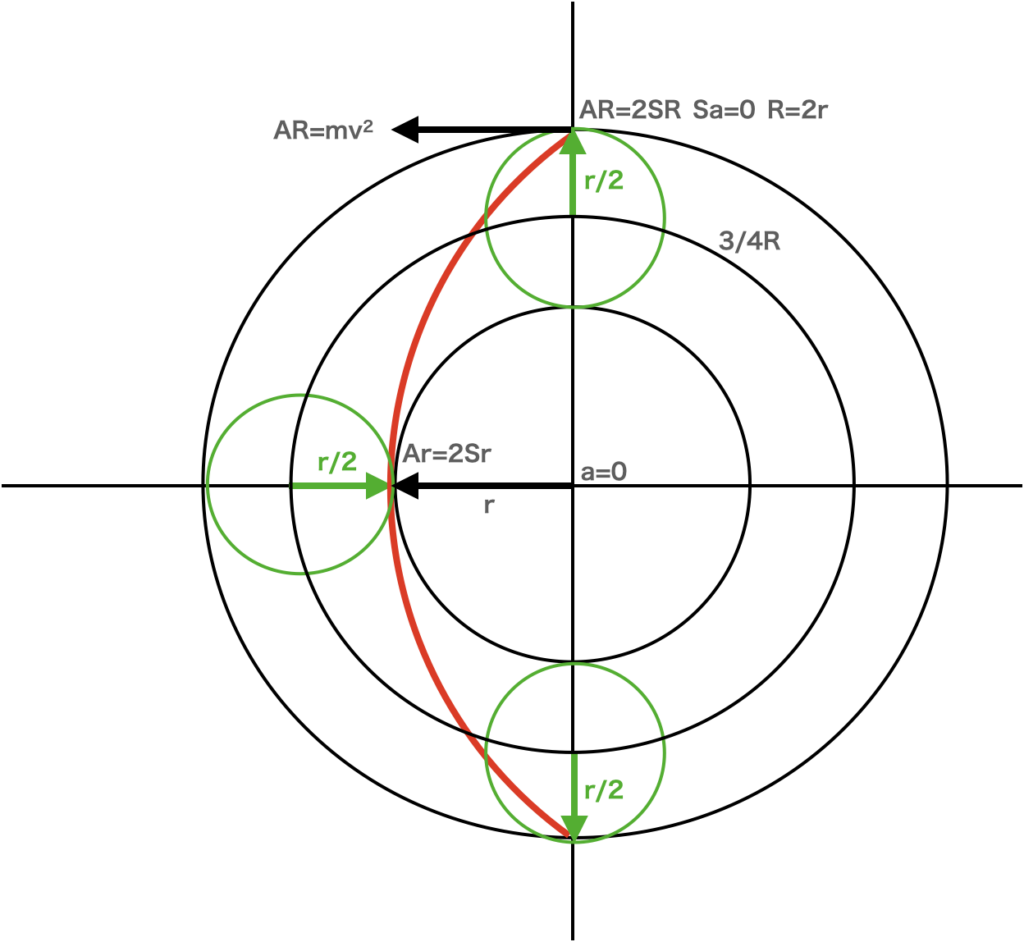
放物線軌道の軌道速度(v)は。
なのですが、
中心星方向の動的エネルギーがなければ、
影響圏に入ることができません。
放物線軌道の動的エネルギーは、中心天体方向のSrが必要です。
Ar = 3Sr
が正しいのではないかと。
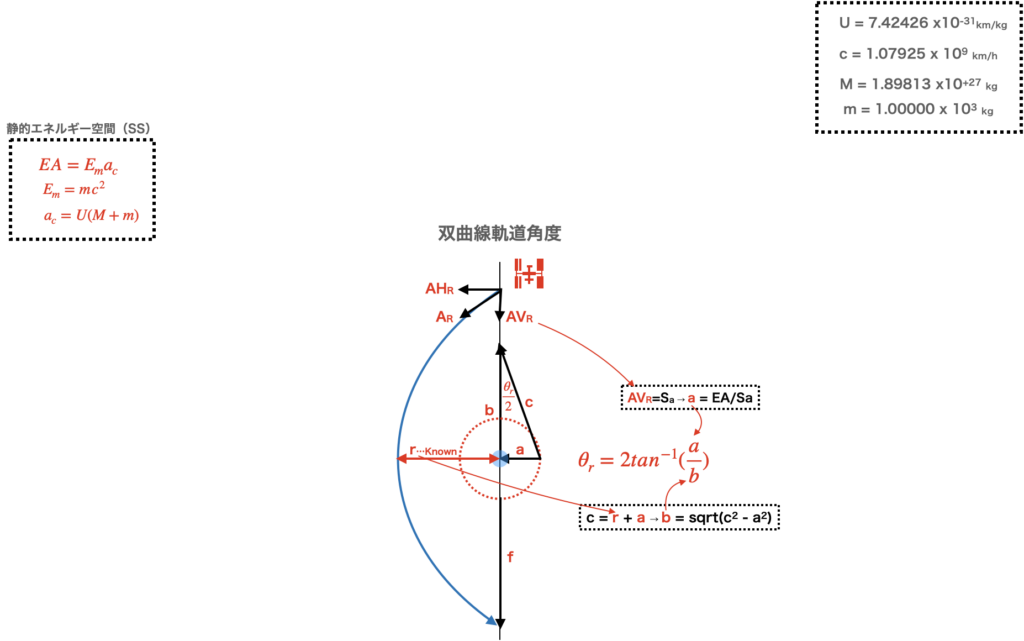
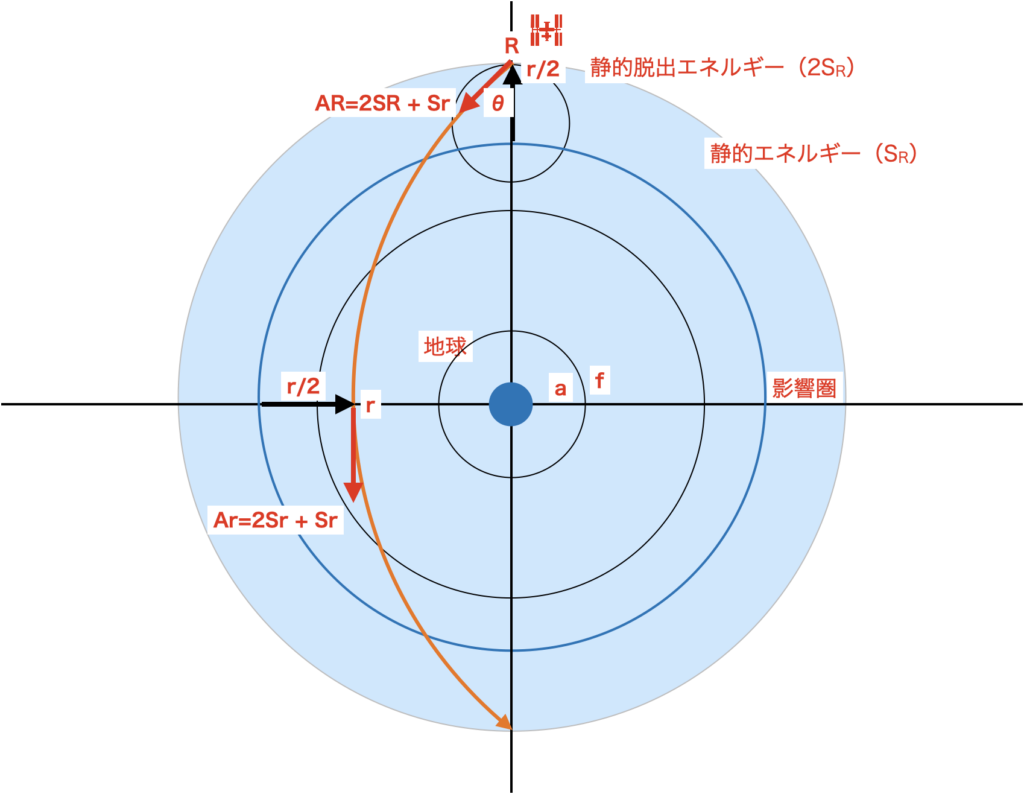
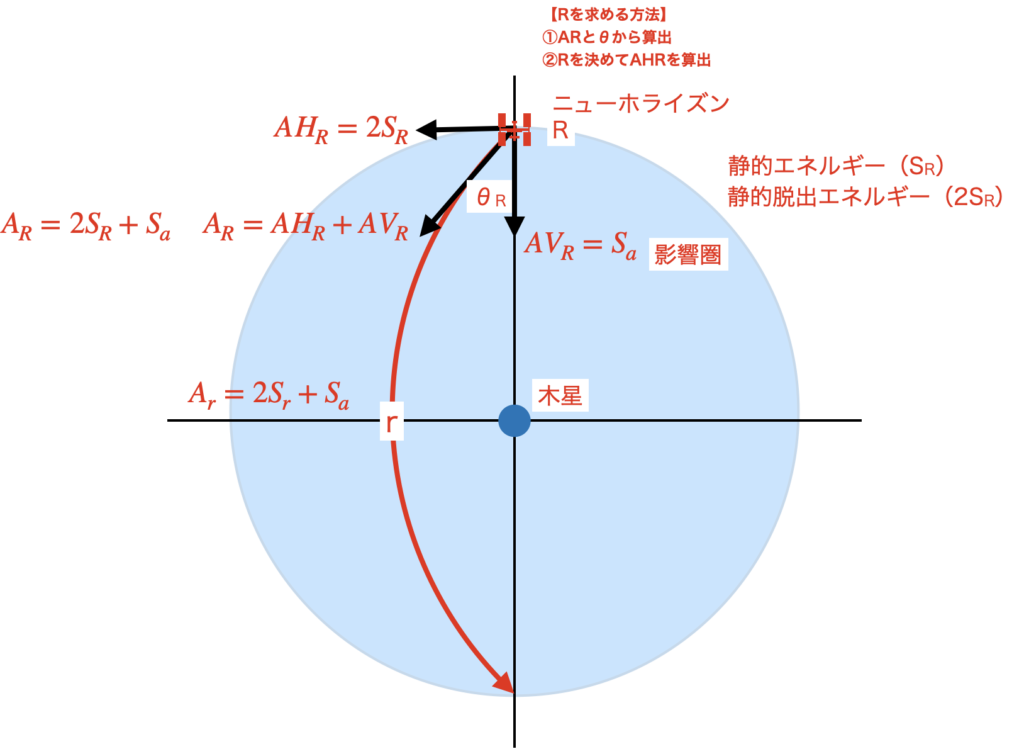
双曲線軌道の最近点が、影響圏への侵入速度と入射角で計算できないかと、
考えていた分けですが、ちょっとわかったかもしれません。
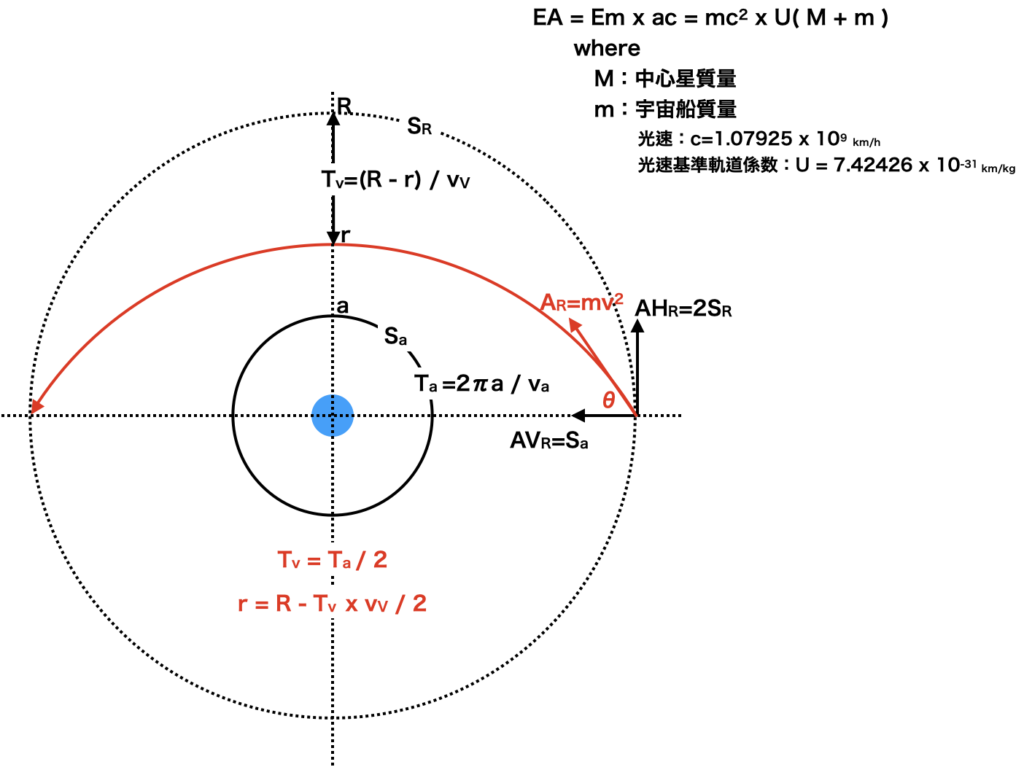
進入動的エネルギー AR(m kg x vR2 km/h)
進入角度θ deg
が既知の場合
■水平方向の動的エネルギーAHR = AR sin2θ kg(km/h)2
■垂直方向の動的エネルギーAVR = AR cos2θ kg(km/h)2
になります。
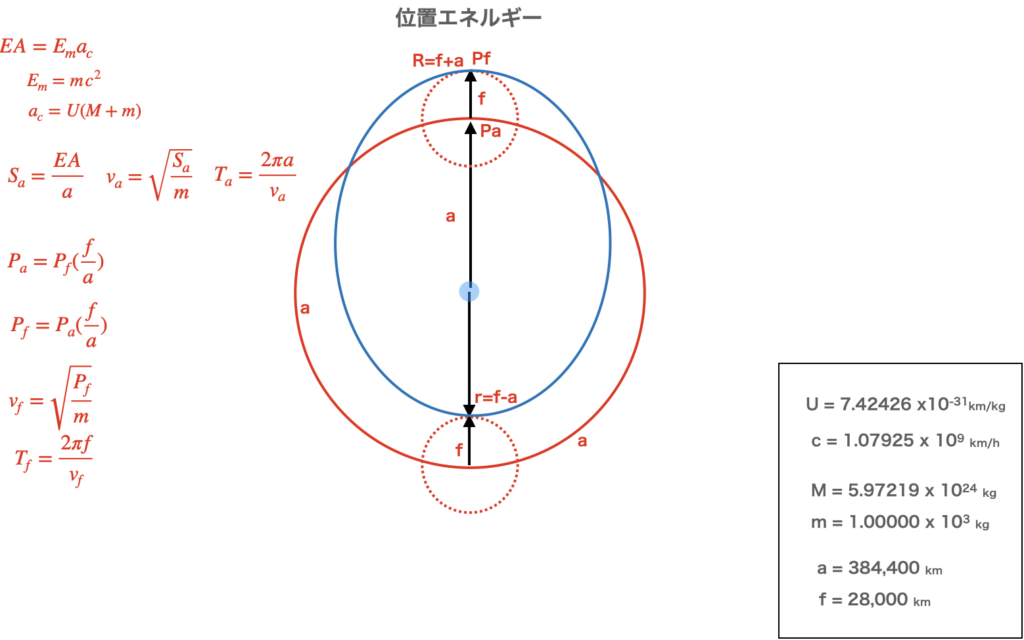
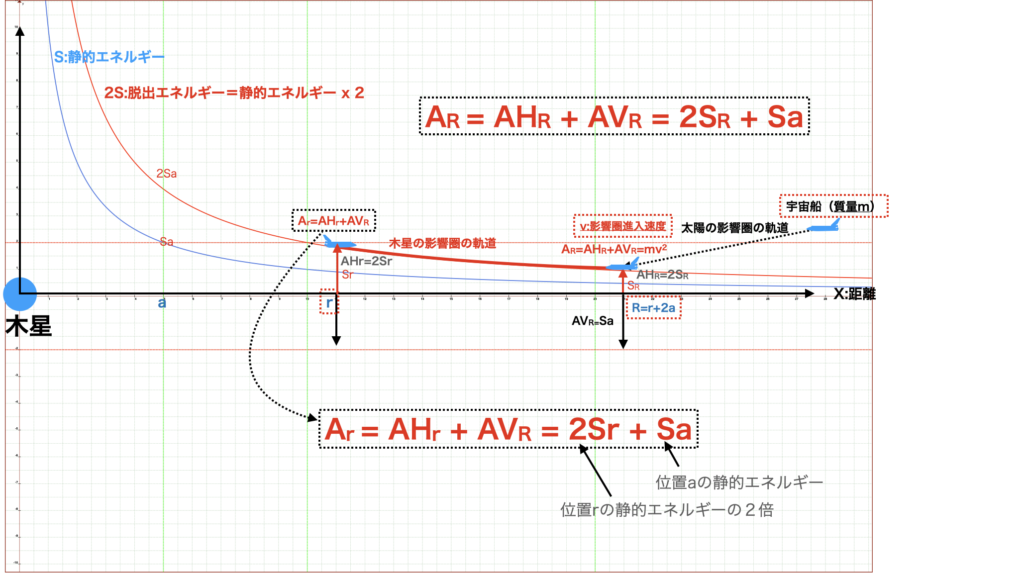
■基準軌道 静的エネルギー(Sa )
基準軌道半径aの静的エネルギーSaと同じ
Sa = AVR kg(km/h)2
になります。
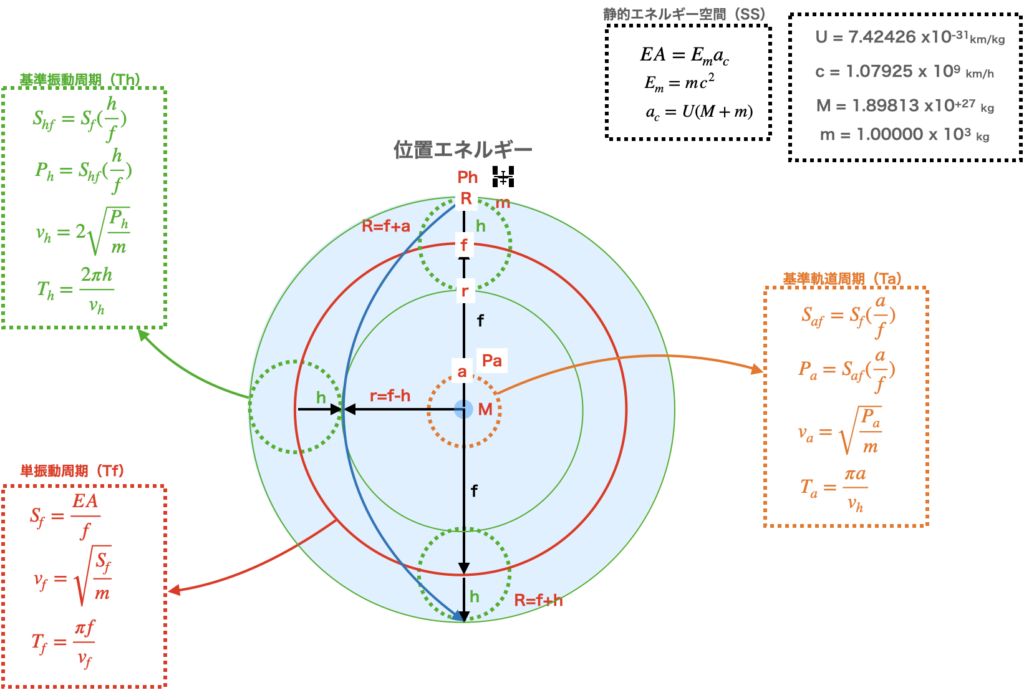
■基準軌道半径(a)
宇宙船の質量をm
中心星の質量をM
質量エネルギーと光速基準軌道半径の積を
EA = Em x ac ( ==> mc2 x U( M + m )) kg(km/h)2km
: c=1.07925 x 109 km/h 、U = 7.42426 x 10-31 km/kg
とすると
基準軌道半径は、a = EA / AVR になります。
■基準軌道の公転周期(Ta)
位置aの軌道速度(va)は、va = sqrt(Sa/m) km/h
なので
Ta = 2πa / va h
になります。
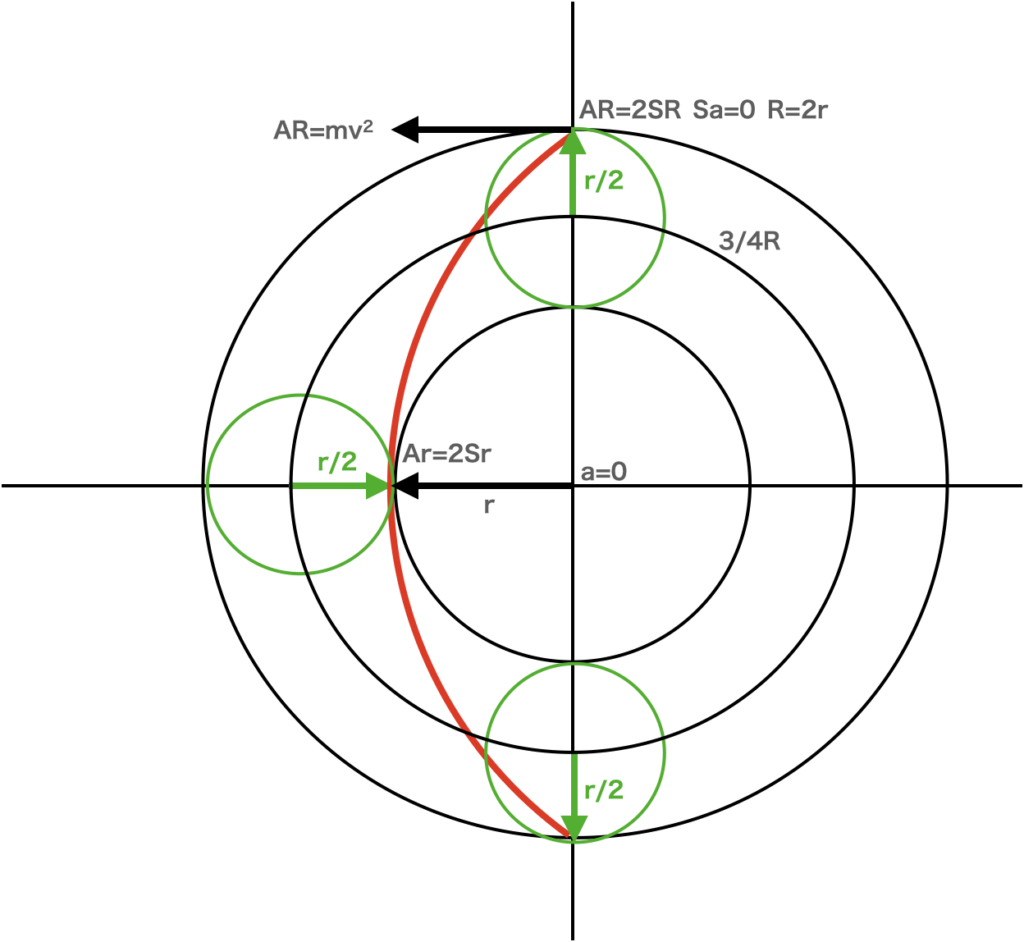
■影響圏境界の静的エネルギー(SR)
位置Rで影響圏(S2静的エネルギー曲線)に侵入するので、
SR = AHR / 2 となります。
■影響圏侵入距離(R)
R = 2EA / AHRになります。
■垂直方向の平均速度(vV)
垂直方向の運動エネルギー(K)は、2SRなので、
vV = sqrt(2SR/m) / 2 になります。
■振動周期(Tv)
宇宙船は、影響圏侵入距離(R)から最近点(r)に到達して、
また影響圏侵入距離(R)に戻るので、
LV =(R – r)x 2 km(①式) 垂直方向に移動するので、
TV = LV / vV h(②式)
になります。
■最近点(r)
ここで、振動周期Tvは、
位置aの公転周期の半分 ( Ta /2) になるので、
①式と②式より
LV =(R – r)x 2 = Tv x vV
式を変形して
r = R – Tv x vV / 2
で算出できます。
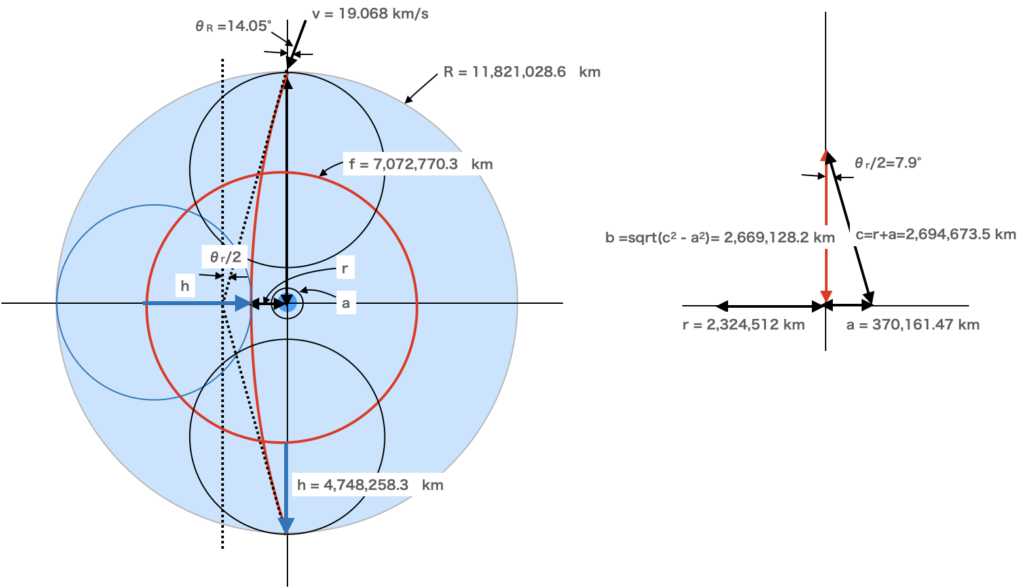
具体例 木星の双曲線軌道
【設定値】
■中心星質量 M = 1.89813e27 kg
■宇宙船 m = 1.0e3 kg
■影響圏侵入動的エネルギー AR = 5.184e12kg(km/h)2
■影響圏進入角度 θ = 52度
【計算結果】
■水平方向の動的エネルギーAHR = ARsin2θ = 1.96494e12 kge(km/h)2
■垂直方向の動的エネルギーAVR = ARcos2θ = 3.21906e12 kg(km/h)2
■基準軌道の静的エネルギー Sa = AVR = 3.21906e12 kg(km/h)2
■基準軌道半径 a = 509,913 km
■基準軌道の公転周期 Ta = 56.470 h
■影響圏境界の静的エネルギー SR = AHR / 2 = 9.82470e11 kg(km/h)2
■影響圏境界の距離 R = 1,670,731 km
■垂直方向の平均速度 vV = 22,163.8 km/h
■振動周期 Tv = 28.235 h
■最近点 r = 1,357,838 km
次の手順で証明をします。
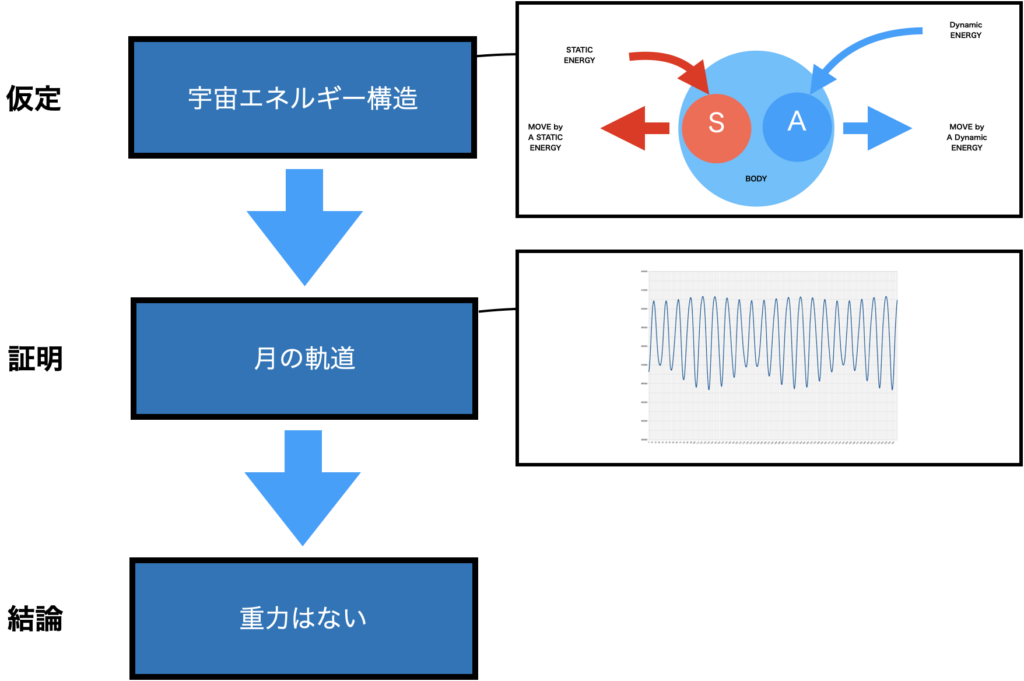
(1)仮定
天体は、「静的エネルギー」と「動的エネルギー」のバランスによって、両方のエネルギーがバランスする方向に移動する。(これを「宇宙エネルギー構造」と呼ぶ事にします。)
●「静的エネルギー」は、2天体間の距離に反比例して、宇宙から供給されるエネルギー(中心天体方向に動く)
●「動的エネルギー」は、外部からの衝突、内部の爆発などによって、天体を動かすエネルギー(中心天体と反対の方向に動く)
●衝突によって、天体の質量が変化する
(2)証明項目
月のエキセントリックな軌道を、(1)の仮定だけで証明する。
●エキセントリックな軌道とは、遠点、近点の位置が一定ではない。
●8.85年で近点が一周する
(3)結論
●①天体は、円軌道上を動く
●②静的エネルギーと動的エネルギーのバランスする位置は基準軌道になる
●③天体同士の衝突により、動的エネルギーの変化により、基準軌道(②)が移動して、基準軌道を中心に振動をして、見かけ上楕円軌道になる(すべての楕円軌道にあてはまる)
●④近点移動は、衝突による質量が変化した事による振動周期(③)の変化(全ての近点移動にあてはまる)
●⑤遠点と近点が一定でないのは、月に小惑星が2度衝突して、うなり軌道になったため
【補足】
○①は、ケプラーの第一法則とは異なります(楕円軌道の特殊な形態が円軌道)
○④は、正しければ、アインシュタインの相対性理論の裏付けの水星の近日点移動が怪しいことになります
○⑤は、正しければ、月のエキセントリック軌道は、太陽の重力以外でも説明できたことになります。
20代から考えると
IBM370アセンブラ
I8080機械言語
COBOL
BASIC3種類
C
C++
Java
HTML
PHP
SQL
JavaScript
思い出せないくらい言語を学んできた。
機械で言えば、
汎用機からパソコン、マイコンまでということになるなあ。
で、
最近、辿り着いたのが、
Python(パイソン)という言語です。
これが、なんとも便利この上ない。
ライブラリも揃っていて、
importすればすぐに使える!!
AIの機械学習だって、プログラミングできる。
グラフも描ける。
さらに型は自動判定。
アナコンダという開発環境を使えば、
インタープリター的に使える。(実際は、実行してコンパイルしなければなりませんが)
Pythonの使い方は、キノコードさんのYoutube動画をみるとわかりやすいです。
ぜひみなさんも、AIプログラミングしてみまsんか!!
今日は、この辺で。
スイングバイについて、ブログを色々書いてきたので、
このあたりで、整理しようと思います。
今日は、免許証の更新なので、手短にです。もちろんゴールドです。(全然関係ないです)
まずは、エネルギーの加減算について書きました。
エネルギーを分解する式を、完全に勘違いしていたので、
備忘録としてブログを書きました。
その後、研究を続けた結果、少しスウィングバイがわかって来た時に書いたブログが
です。
その後、スイングバイは、双曲線軌道上を動くということがわかり書いたブログが、
です。
その後、実際の値が欲しく成り、ニューホライズンの木星のスイングバイのデータを使って計算して書いたブログが
です。
その後、無謀にも、衝突エネルギーによる、双曲線軌道を、よせばいいのに考えてしまったブログが
です。
その後、平常心を取り戻して、双曲線軌道を完成させたのが、
です。
これは、重力を使わず、エネルギーだけで、双曲線軌道を計算できるようにしました。
ボイジャー2号の木星のスイングバイのデータを利用して確認しました。
その後、天体のどこまで近づいたら、その天体の影響圏に入るかというのを研究して書いたブログが
です。
そして、重力レンズを、重力を使わずにレンズ効果を研究して書いたのブログが
です。
スイングバイについて、重力を使わずに説明してみました。
かなり、研究に長い時間かかりましたが、結構真実をついていると思います。
この辺で失礼します。
前ブログで、「引力」に地球などの自転の遠心力を加味したのが「重力」というのを説明しました。
厳密に言えば違いますが、ここでは同じとみなして話を進めます。
ニュートンの登場
「引力」に気がついたのは、かのニュートンです。
ニュートンは、万有は引っ張りあっていると思いつき、
全てのものは引力で引っ張りあっているという結論に達したのでした。
だから、
地球は月を引っ張る!「万有引力」。
地球は林檎を引っ張る!「万有引力」。
ってところまでは、まあまあよかったのですが、
力は「作用反作用」という原理があるので、
月は地球を引っ張る!「万有引力」。
林檎は地球を引っ張る!「万有引力」。
ということで、2体(地球と月)は宇宙空間で、
次第に両方動いてくっついてしまうという現象が起きることになってしまった。
さらに、「引力」自体がどうして発生するのかという根本的な原因は、
ニュートンは説明できずに亡くなってしまいました。
アインシュタインの登場
300年くらい経って、アインシュタインが登場しました。
アインシュタインは、光速度一定の原理から「特殊相対性理論」を確立しました。
10年後に時間と空間を合わせた時空という概念を創作し「一般相対性理論」確立しました。
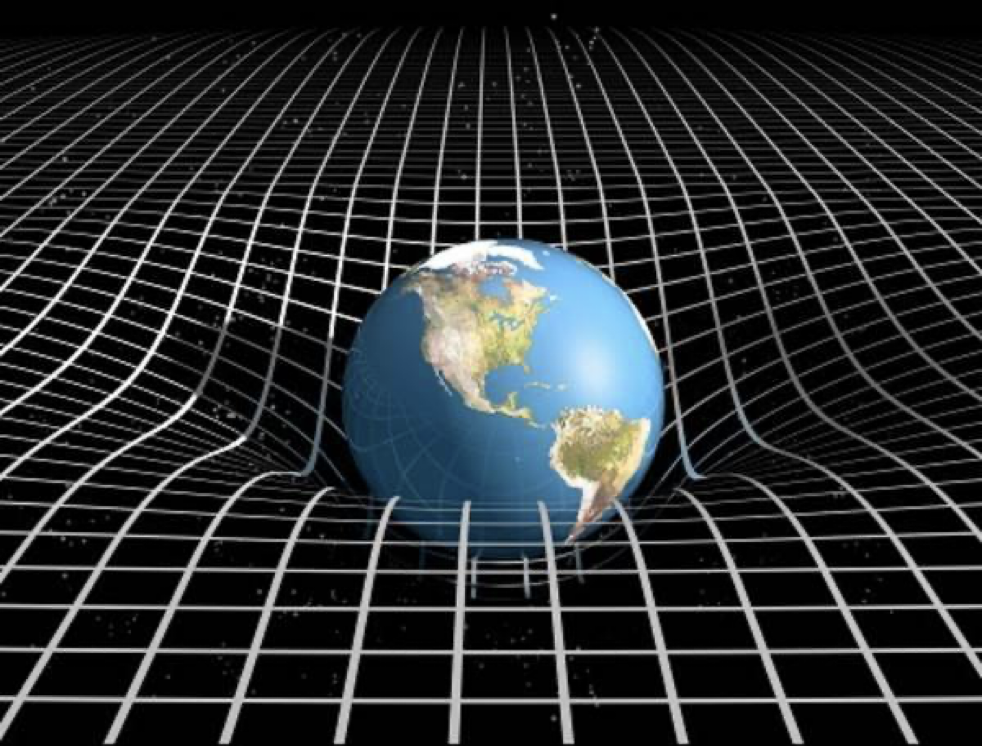
簡単にいうと、時間と空間は相対的なもので、質量(重量とは異なりますが、何の影響も受けない本質的な重さのことです。概念的には重量と思ってOKです)によって、時空が歪むということです。
その時空の歪みこそが「重力」の原因ということです。
天体は、その歪みに沿って落ちていく。
よく見るイメージ図はこんなのです。

まあ、地球の質量程度では、時空の歪みはほんの少しですが、
太陽の質量程度になると、時空の歪みがわかるようになります。
時空の歪みに入ると、天体は中心に向かって落ちていくというイメージです。
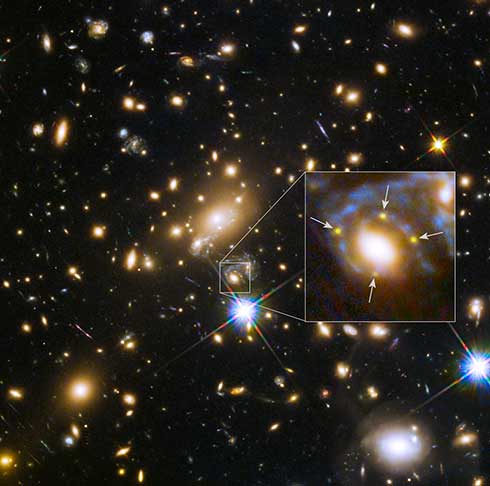
さらに、アインシュタインは、時空の歪みによる「重力レンズ」を予想しました。
「重力レンズ」が証明されたのは、
見えないはずの天体(たいようの後ろに隠れている天体)が、日食の時に見えた!
ってことで、重力が凸レンズの役割果たした!
ということです。
さらに、「水星の近点移動の誤差」を「時空の歪み」で証明できたことです。
水星軌道は、近点が100年で575秒(1秒は1度の3600分の1)移動することはわかっていました。
原因は、「摂動」(他の惑星の引力による影響)ということになっていました。
厳密に「摂動」の影響を計算した結果、528秒くらいまでは、わかったのですが、
残りの47秒の原因は「摂動」では、説明できませんでした。
そもそも、575秒を観測した人はすごいですが!
その47秒の誤差を、「時空の歪み」で説明できた!ということです。
だから、「時空の歪み」(一般相対性理論)は正しいということになりました。
アインシュタインは他に、「重力波」とか「ブラックホール」などを予想しましたが、
「ブラックホール」は最近、画像を写すことができて話題になりました。
「重力波」については、科学者たちが捉えようと、躍起になっています。
謎について
アインシュタインにより「重力」の原因が解けた!
と思いましたが、もう一度よく考えてみます。
「水星の近点移動の誤差」と「重力レンズ」の原因が、「時空の歪み」でないとしたら、
「一般相対性理論」は、もしかしたら違っているかもしません。
そもそも、近点移動が起れば、楕円軌道でないわけです。
つまり、厳密には「ケプラーの第一法則」は成り立っていないわけです。
「水星の近点移動の誤差」の謎
前ブログで、天体は「ツリー構造」をしています。と結論付けました。
この考え方からすると、そもそも「摂動」は発生しません。
つまり、「水星の近点移動」の原因は、「摂動」以外で説明できなければいけません。
詳しくは、「近点移動」のところで説明しますが、
簡単にいうと、
水星に小惑星が衝突した時に、
水星の質量が変化したことが原因です。
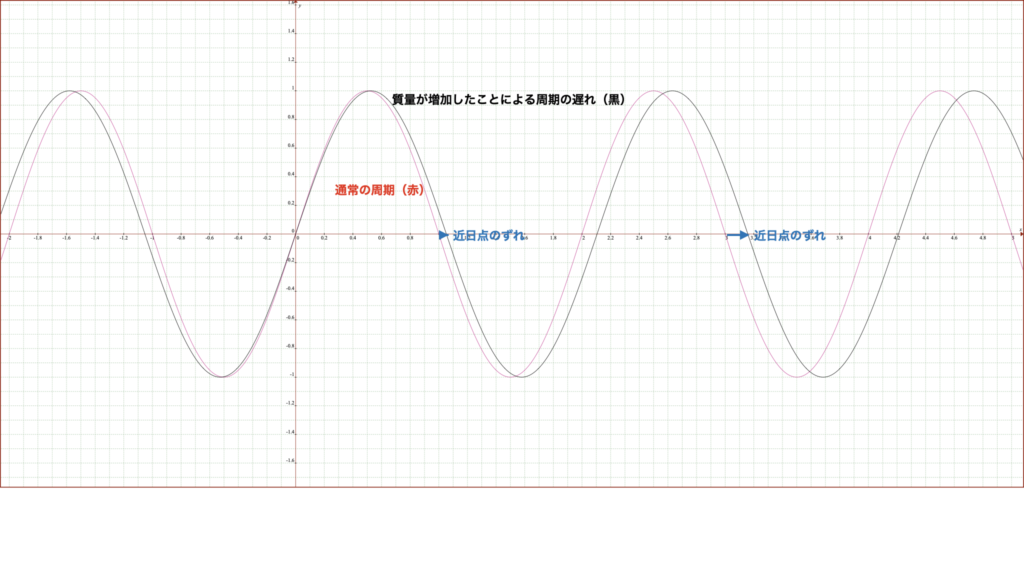
つまり、バネに錘がついているのを想像してみてください。
それを、引っ張って振動させます。
そうすると、上下に錘は振動します。
その錘を重くすれば、ゆっくり振動します。軽くすれば、早く振動します。
この原理を利用すると、
水星が基準軌道を中心に振動していたとします。
これは、見かけ上「楕円軌道」になります。
その水星に小惑星が衝突したとします。
そして、小惑星の一部が水星に残ったとします。
そうすると、水星の質量が増えます。
水星の質量が増えたことによって、振動が遅くなります。
振動が遅くなることによって、
1振動してに戻ってくるまでに時間がかかるわけです。
この遅れが、見かけ上、近点が移動したように見えます。
質量の変化が近点移動の原因です。
とすると、
水星の近点移動の100年575秒はすべて、質量変化が原因と考えられます。
計算した結果は、このブログに書きました。
原理は、このブログに書きました。
参考にしてください。
これが正しければ、「一般相対性理論」の牙城が崩れます。
「重力レンズ」の謎
重力レンズは、光は質量がないから、重力の影響を受けない!
だから、見えないはずの天体がみえる!
っていうのは、時空が歪んでいるからだ!
というのが「一般相対性理論」を使った証明です。
そこで、もしも光がエネルギーだったらどうでしょうか。
アインシュタインの有名な式E = mc2をつかえば、
エネルギーと質量の変換ができます。
光をエネルギーとすれば、質量と同じとみなすことができます。
「動的エネルギー」だけならば、まっすぐ進みますが、
「静的エネルギー」が注入されれば、軌道が変わります。
それが、「重力レンズ」のような働きをしているのではないかと予想します。
質量の大きい天体の「静的エネルギー」は光の軌道を曲げる大きいので、
光が双曲線軌道を描いて、質量の大きな天体を横切ります。
双曲線軌道は、このブログを参照ください。
これは、予想に過ぎませんが、
これが正しければ、「一般相対性理論」の牙城が崩れます。
「重力レンズ」の記事
これらの理由で、「一般相対性理論」ちょっと待てよ!
と思うのでした。
会議に行かなければんらないので、この辺で!!
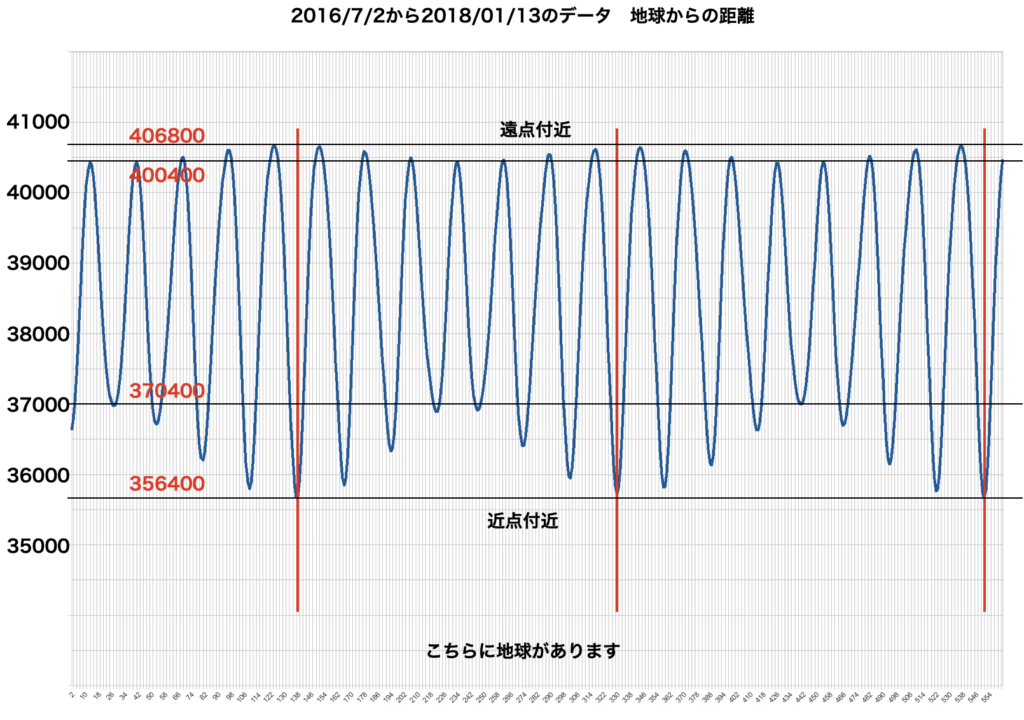
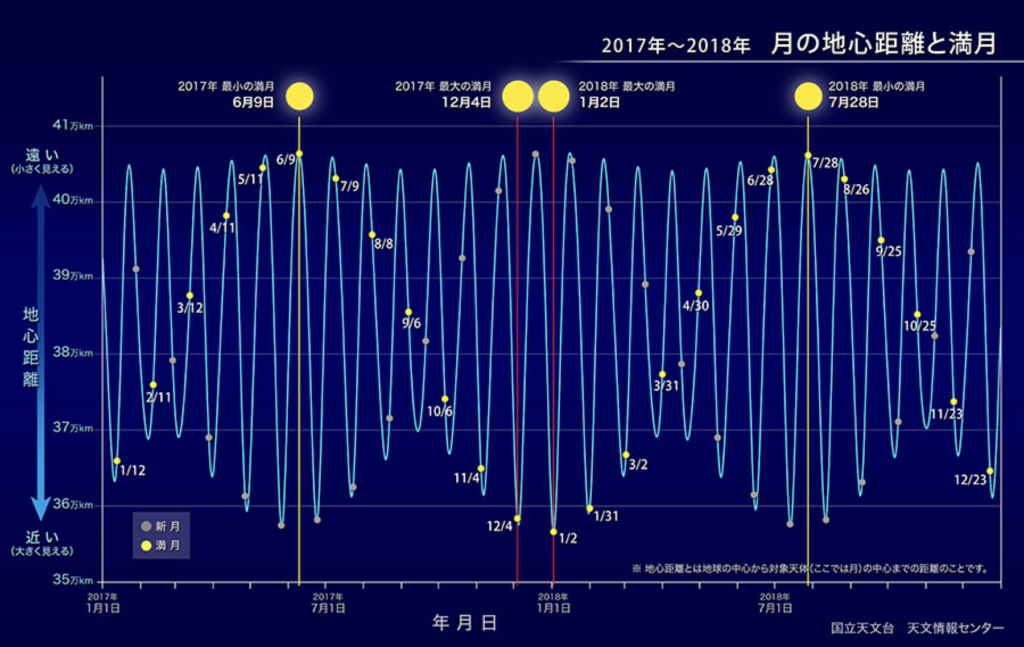
月の軌道モデリングといっても、上のグラフではよくわからないと思います。
少し説明すると、
地球の中心から月の中心までの距離を「地心距離」といいます、
地心距離については、国立天文台の地心座標で計算できます。
上の式のy2が地心距離になります。(私が作ったモデリング式です。)
この形のグラフの場合、下に地球があり、赤いグラフが時間による月の地心距離になります。
wikiPediaによると
現在の月の
平均軌道半径(基準軌道半径)384,400 kmです。
地球に近い時(ある期間で一番近い時を最近では「スーパームーン」といいます)
近点:354,400 km~370,400kmと幅があります。
また、地球から一番遠い時
遠点:404,064 km~406,712km
とどうように幅があります。
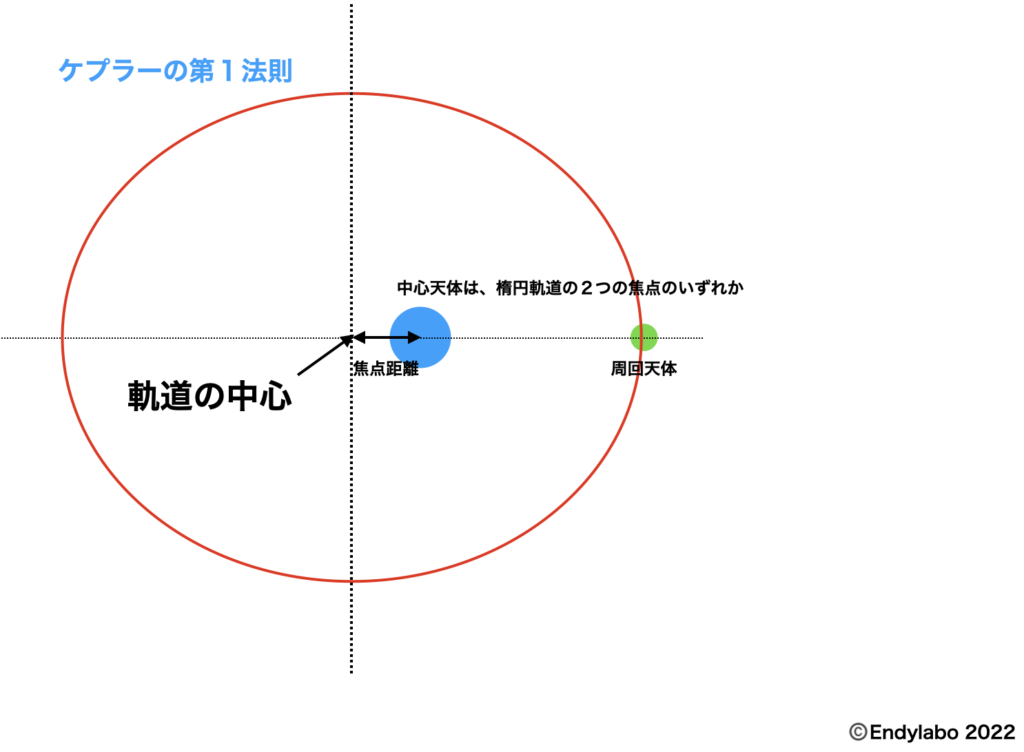
普通の天体は、近点と遠点が「固定」なのですが、(ケプラーの第一法則「惑星は楕円軌道」になります。)
月は遠点と近点が「変動」します。
それが月の軌道はエキセントリックと言われる所以です。
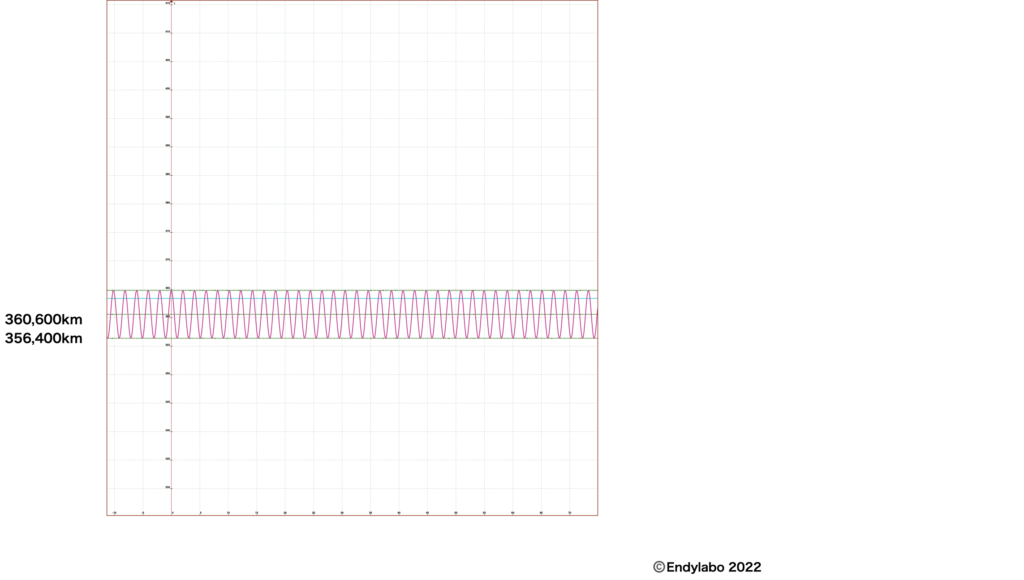
因みに実際の月の地新距離は
です。
私が、作成した式y2とよく似ていませんか。
遠点の変動と近点の変動がほぼほぼ似ていると思います。
月の地心距離のモデリング式の解説
ここから先は、興味ある人だけ見ていただければOKです。
まず、月のエキセントリックな軌道の原因は、
このホームページのタイトルになっている、
「Once upon a time the moon impacted twice.」(月は、かつて2度の衝突があった)
というのが、独自理論です。
国立天文台の理論は、太陽の影響という理論です。
「出差」「二均差」「年差」「中心差」によるということです。
詳しくは、国立天文台の月の公転を参照ください。
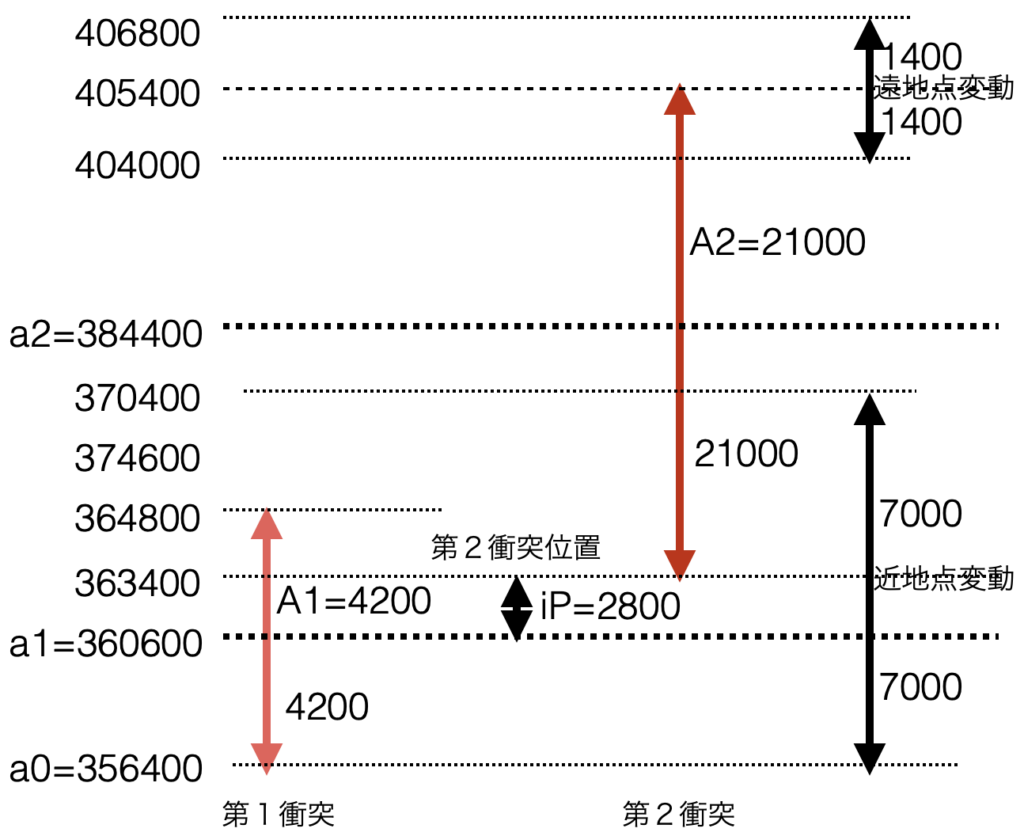
月へ小惑星が二重衝突したという推論ですが、次のように推論しました。
(1)月は、当初、基準軌道半径356,400kmで円軌道上を動いていました。
(2)第1衝突
次に、第1の衝突があって、
月は基準軌道半径360,600kmで、振幅4,200kmの振動する軌道になりました。
次のような地心距離のグラフになります。
なぜ振幅4,200kmかというと、
現在、近点で振幅7,000km(変動は14,000km)の変動をしていて、
遠点で振幅1,400km(変動は2,800km)をしています。
近点と遠点の振幅合計が8,400kmなので、
その半分の振幅があれば、近点と遠点の変動になる。のではないかと算出した値です。
波動計算は、あまり得意ではないので、
(数学ガールの物理ノート/波の重ね合わせ 結城浩著 SB Creativeを参考にしました)
勘で算出した値ですが、第2衝突のときの計算をしたら、意外にしっくりきました。
基準軌道半径が356,400kmから360,600kmに変わったので、
ケプラーの第3法則から公転周期(T1)は、(356,400/360600)^(3/2)倍になります。
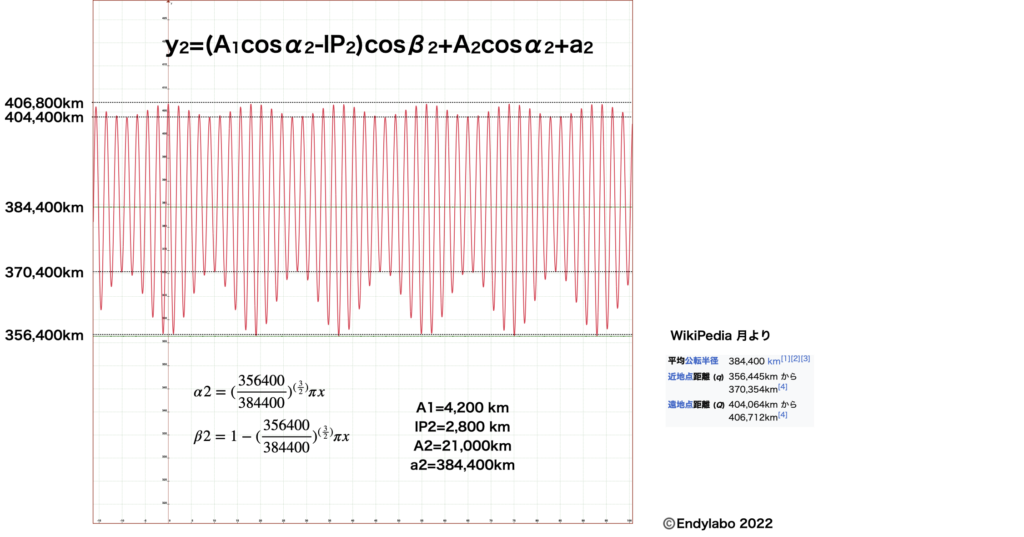
(3)第2衝突
次に、第1衝突でできた楕円軌道(振幅4,200kmの基準軌道(360,600km))の
基準軌道(360,600km)から2,800kmのところ(363,400km)で、
小惑星と月の第2衝突が発生しました。
その衝突により、振幅21,000kmの振動が発生し、
現在の基準軌道半径(384,400km)になりました。
第2衝突は、かなり大きかったと予想されます。
第1衝突でできた基準軌道は、360,600kmから384,400kmに変化したので、
当初基準軌道の公転周期(T1)からは(356,400/384,400)^(3/2)倍になります。
そのため、当初の公転周期(356,400km)と
第2衝突後の公転周期(384,400km)の差の
比率(1-(356,400/384,400)^(3/2))の差がでます。
その差が、軌道にうなりになります。
そして、衝突した位置が第一衝突後の基準軌道(360,600km)から
(2,800km)遠点に近い位置なので、
正弦波(ここでは余弦波で計算)の位置を-2800kmずらした正弦波と同等の軌道になります。
それが、下グラフのようになります。
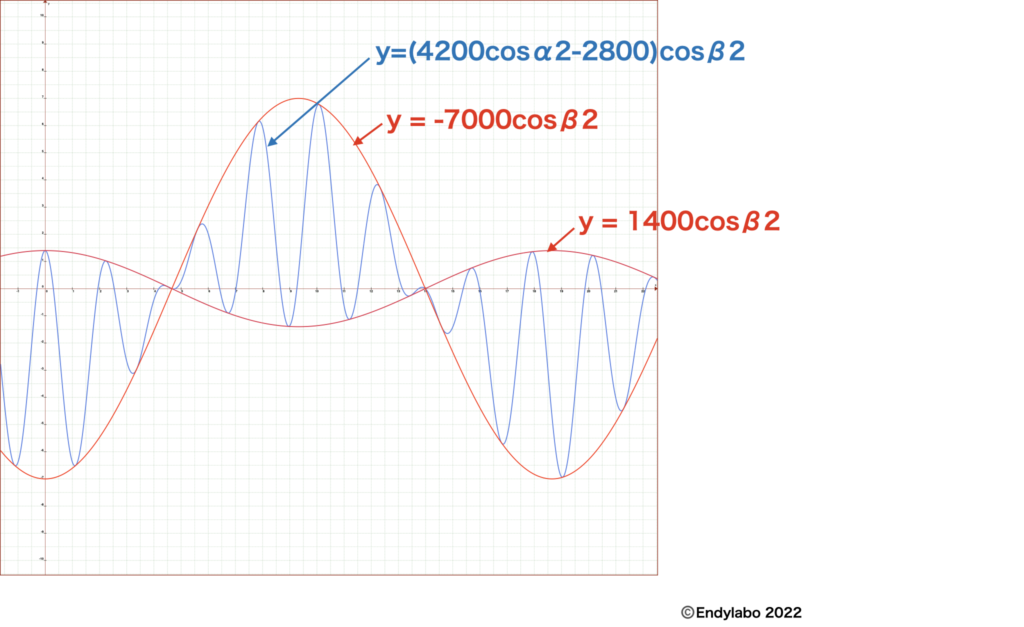
この振動に、基準軌道が変化と第2衝突でできた振幅21,000kmの軌道が、合成されます。
すなわち、第2衝突後の軌道は、
地心距離 = 第1衝突の楕円軌道のうなり軌道 + 第2衝突の楕円軌道 + 第2衝突後の基準軌道
の式になります。
これは、最初に記載した式y2になります。
月の2重衝突による地心距離の関係を次の表にあらわしました。
このことからわかること
このことから、月に小惑星が2回衝突すると、月のエキセントリックな軌道の説明がつきます。
これは、単に月のエキセントリックな軌道が、
わりと簡単な式で表されただけでなく、次のことがわかります。
(1)月の一番居心地の良い場所は、基準軌道上です。
そして、そこからはずれると、そこに戻ろうとします。
(2)基準軌道上を円運動しています。
つまり、ケプラーの第一法則のように楕円軌道の1つの焦点に中心天体があるのではなく、
円軌道の中心に中心天体があるということです。
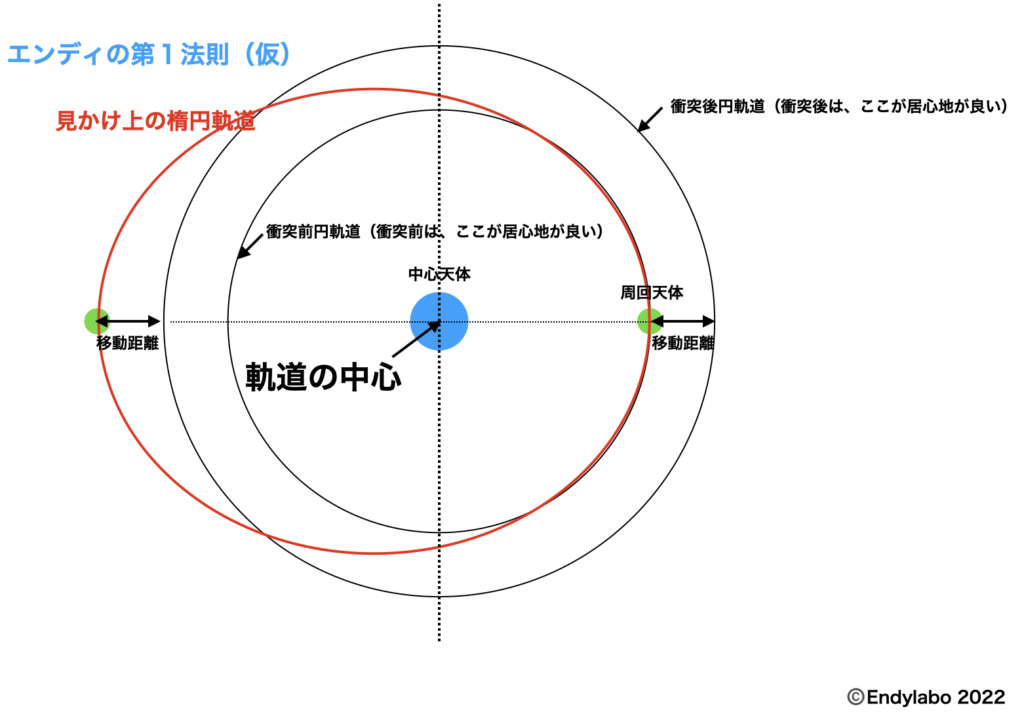
(3)基準軌道を中心に、振幅Aで振幅しています。
遠点は基準軌道+振幅A、近点は基準軌道ー振幅Aになります。
このことから、周回天体(月)は、インテリジェントに居心地が良い場所に移動します。
(猫のチャーは、坊さんの座布団に鎮座する 理論)
そして移動した距離を振幅として振動した軌道になる、
という推測も大方間違いではないわけです。
居心地が良い場所とは、ニュートンが言っている遠心力
(このサイトでは「動的エネルギー」)と引力(このサイトでは「静的エネルギー」)が
バランスするところのことを意味します。
動的エネルギーと静的エネルギーについては、詳細は、このブログを見てください。
この理論をエクステンションすると、「万有引力がなくても、天体は軌道上を動く」ということになります。
エネルギーの継承については、何回かブログに載せましたが、
すこし、論文向けに整理しようと思います。
要旨
ニュートンの重力の説明は、力のバランスがおかしい。アインシュタインの重力は時空間の歪みは、難しすぎて、宇宙がそんなに複雑な仕組みと思えない。(あくまで私見ですが)
そこで、天体がエネルギーをバランスさせながら動く、インテリジェントな仕組みを考えてみました。
この仕組みで、月のエキセントリックな軌道が説明できれば、正しさが証明できます。
エネルギーの種類(The Kind of the Energy)
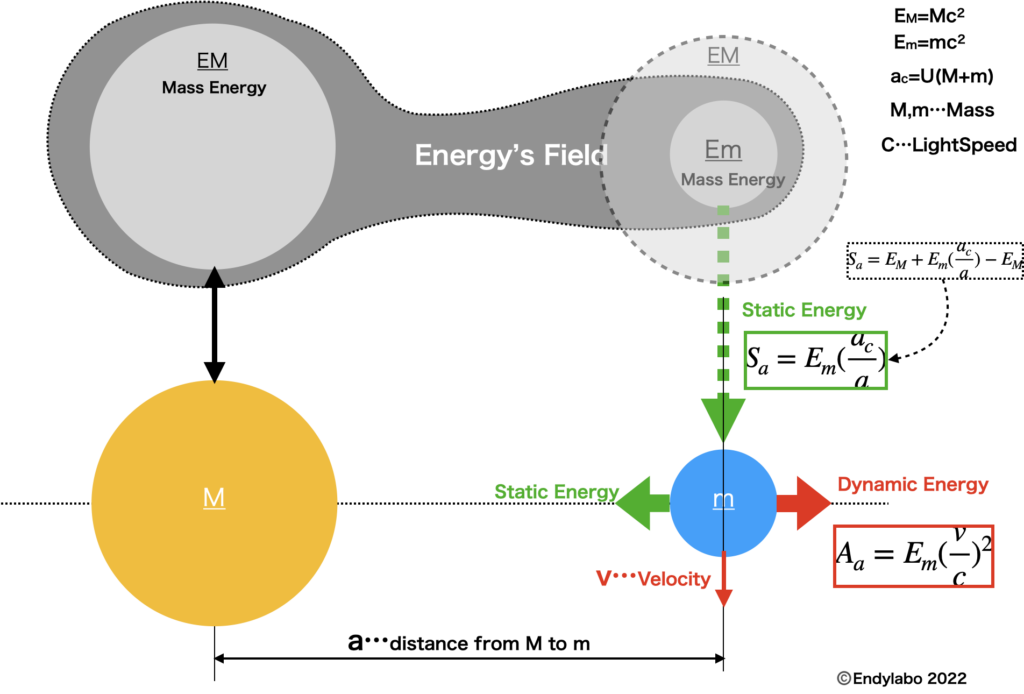
(1)質量エネルギー(the Mass Energy)
アインシュタインの有名な式
Em = mc2
です。
(2)静的エネルギー(the Static Energy )
質量エネルギーに距離の比を乗じた

です。
(3)動的エネルギー(the Dynamic Energy)
質量エネルギーに速度の2乗比を乗じた

です。
詳細は、「宇宙構造」「宇宙エネルギー構造」を参照してください。
天体モデル(The Body’s Model)
(1)構成
天体モデルは。「質量エネルギー」「動的エネルギー」「静的エネルギー」の3種類からなります。
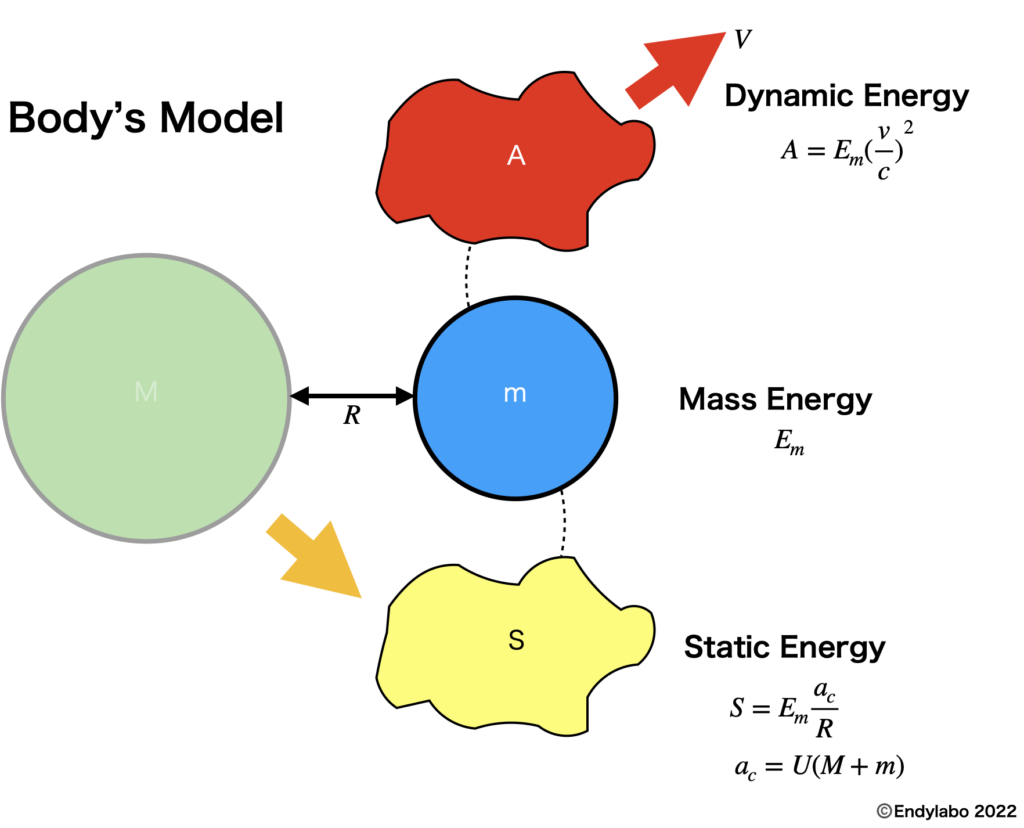
(2)仕組み
質量エネルギーに対して、衝突や爆発などにより「動的エネルギー」が発生すると、
天体は衝突した方向に動きます。
これは宇宙に天体が一つならば、等速直線運動をします。
宇宙に天体が2つあった場合、2つの天体の質量エネルギーの差により、
「静的エネルギー」が発生します。
静的エネルギ=は、大きな天体の方に引き寄せる方向に働きます。
天体は、「動的エネルギー」と「静的エネルギー」がバランスする方向に動きます。
2天体の場合は、小さな質量エネルギーの天体が大きな質量エネルギーの周りを等速円運動をします。
エネルギーの継承(The Inheritance of the Universe’s Energy )
(1)構成
(A)親エネルギー(The Energy of Parent)
親天体は2天体のうち、質量エネルギーが大きな天体です。
親天体が保持している、「動的エネルギー(下図A0)」「静的エネルギー(下図S0)」を親エネルギーと言います。
(B)子エネルギー(The Energy of Child)
子天体は2天体のうち、質量エネルギーが小きな天体です。
子天体が保持している、「動的エネルギー(下図A1)」「静的エネルギー下図S1)」を子エネルギーと言います。
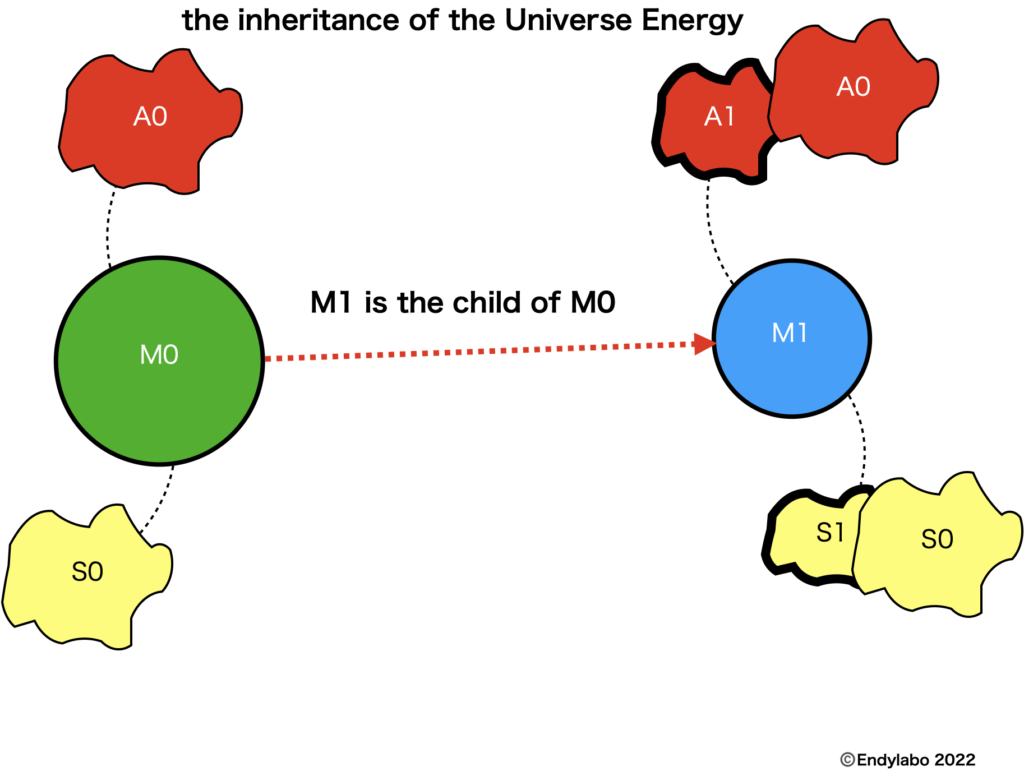
(2)エネルギー継承(The Inheritance of the Universe’s Energy)
親エネルギーはすべて子に継承されます。
上図のように、親の「動的エネルギー(A0)」が子の「動的エネルギー(A0)」に継承されます。
また、親の「静的エネルギー(S0)」が子の「静的エネルギー(S0)」に継承されます。
その親エネルギーが子エネルギーに継承されることによって、M0とM1は同じ動きをします。
例えば、太陽に追随して、地球は動いています。
地球が太陽に追随して動くためのエネルギーが、太陽から地球に継承されているという考え方です。
実際は、継承というより、M0とM1は同時に形成されたのではないかと想像されます。
(3)親判定(The jadge of Parent)
3天体があったときにどのようなエネルギー継承になるかというのが、次の2つ図です。
図1は、惑星モデルです。例えば。M0が太陽、M1が地球、M2が水星という関係です。
図2は、惑星モデルです。例えば。M0が太陽、M1が地球、M2が月という関係です。
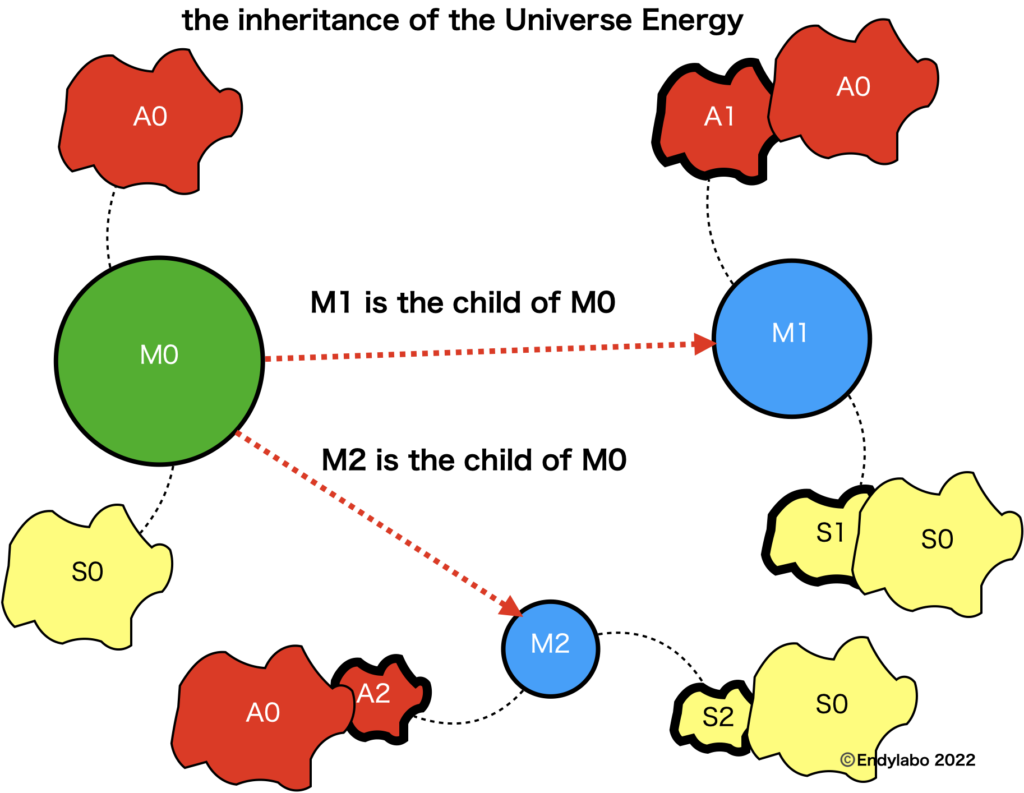
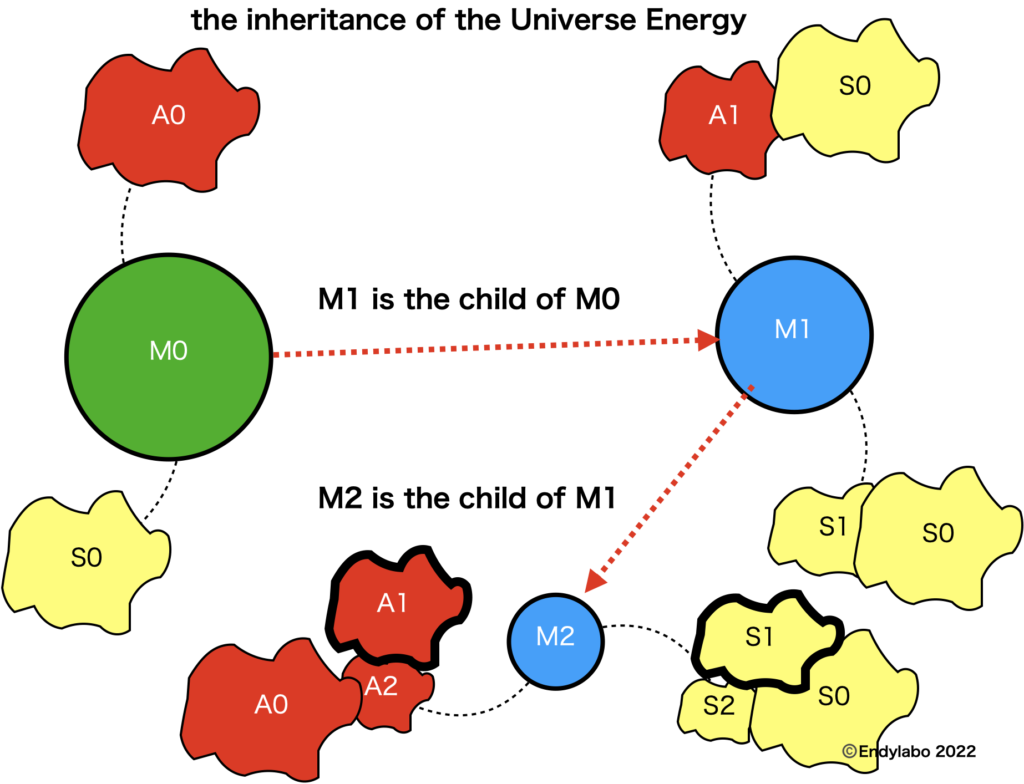
図1の場合
水星の親は太陽なので。太陽の親エネルギー(A0、S0)が継承され、太陽の周りを回ります。
地球の親は太陽なので、太陽の親エネルギー(A0、S0)が継承され、太陽の周りを回ります。
図2の場合
地球の親は太陽なので、太陽の親エネルギー(A0、S0)が継承され、太陽の周りを回ります。
月の親は地球なので、太陽の親エネルギーが継承された地球の子エネルギー(A1、S1)と地球の親エネルギー(A0、S0)が継承され、太陽の周りを回っている地球の周りを回ります。
この2図からわかるように、
地球の親エネルギーが継承されれば親は地球、
地球の親エネルギーが継承されなければ、親は太陽
のどちらかしかありえません。
図1で水星が地球の親エネルギーを継承すれば、地球の周りを水星が回ることになります。
その際には、太陽の親エネルギーも地球から受けているので、地球が親になるということです。
したがって、3体問題はおきないということになります。
さて、水星の親が太陽なのか地球なのかの判断は、親判定によって決まります。
次のグラフを参照してください。
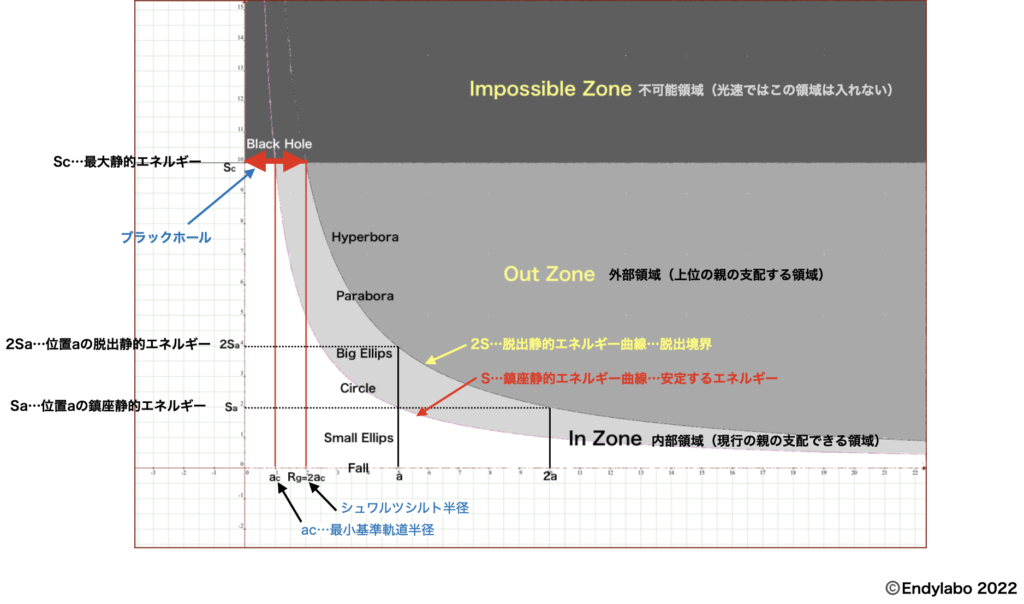
In Zoneは、現在の親(例えば地球)がつくる、S-曲線(静的エネルギー曲線)と2S-曲線(脱出エネルギー曲線)です。2S-曲線はS-曲線の2倍のエネルギーになります。
例えば、親からの距離aにある月の動的エネルギーが、天体の衝突などによりaの位置の2S-曲線より大きければ(A > 2Sa)、Out Zoneになり、親が太陽になります。
逆に、スイングバイのようにOut ZoneからIn Zoneに入ってきた場合は、2S-曲線上を動くことになります。
スイングバイの時は単純ではないので、こちらを参考にしてください。
とりあえず今日はここまで